Материал: Разработка и исследование радиально-поршневого насоса с автоматическим управлением по давлению
При вращении ротора рабочий комплект сжимается
давлением рабочей жидкости в камере 26, а пластины под действием центробежной
силы и давления (на участке нагнетания) прижимаются к расположенной эксцентрично
внутренней поверхности статора, причем объемы рабочих камер, ограниченных двумя
соседними пластинами, ротором, статором и распределительными дисками,
изменяются: увеличиваются при движении камеры ниже оси 1 - 1 и уменьшаются в
процессе ее движения выше этой оси. Пазы 24 и 17 выполнены таким образом, что
при увеличении объемов камер последние постоянно связаны со всасывающей линией,
а при уменьшении - с напорной. Давление рабочей жидкости в зоне нагнетания
создает силу, действующую на ротор сверху вниз (воспринимается подшипниками
скольжения) и на статор - снизу-вверх (воспринимается опорой 6).
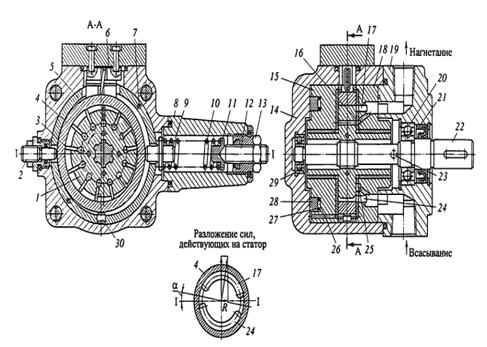
Рисунок 1.5 - Конструкция пластинчатого
регулируемого насоса Г12-5
Благодаря тому, что пазы 24 и 17 выполнены не симметрично относительно оси 1 - 1 (повернуты на некоторый угол α в направлении вращения), сила, действующая на статор, отклоняется от вертикали, т.е. появляется некоторая составляющая R, стремящаяся сдвинуть статор, опирающийся на неподвижную 30 и подвижную 6 опоры, вправо, преодолевая силу пружины 10 регулятора давления. Последний содержит так же корпус 8, толкатель 9, подпятник 11, регулируемый винт 12 и гайку 13. Наибольший эксцентриситет ограничивается упором 2. Наружные утечки исключаются манжетой 21; утечки из корпуса отводятся через дренажное отверстие 23.
Недостаток насоса, представленный на рисунке 1.5 заключается в том, что пластинчатые насосы работают при давлении 16 МПа, так как герметизация рабочей камеры осуществляется по линии.
Характеристики насосов приведены на рисунке 1.5. При увеличении давления p (рисунок 1.6 а) подача насоса Q медленно снижается в связи с ростом внутренних утечек (Qном - номинальная подача; Q0 - подача при p=0). Когда давление достигает величины p1, сила R преодолевает сопротивление пружины и при дальнейшем росте давления подача Q резко уменьшается (практически до нуля), т.е. до величины утечек в гидросистеме при давлении p2. В процессе регулировки насоса давление p2 при нулевой подаче настраивается винтом 12 (см. рисунок 1.5), причем при увеличении подачи до 0,9 Qном давление должно быть не менее p1.
Заменой силовых пружин 10 можно обеспечить три диапазона регулирования Д1 - Д3 (рисунок 1.6, б), а внутри каждого из диапазонов настраивать давление винтом 12 (см. рисунок 1.5) Настройка различных значения подачи в пределах 0,4 Q0….Q0 (см. рисунок 1.6 в) осуществляется упором 2. При резком изменении расхода рабочей жидкости, поступающей в гидросистему, и высокой жесткости напорной линии возможны значительные колебания давления в переходных режимах.
На рисунке 1.6 г приведена осциллограмма
изменения давления в напорной линии, состоящей из стального трубопровода
диаметром 20 мм, длиной 150 мм между насосом и запирающим распределителем и
двух отводов медными трубками 6х0,8 мм длиной по 150 мм к датчику давления и
манометру, который при осциллографировании закрывается вентилем. При изменении
расхода рабочей жидкости от номинальной подачи насоса с V0=45 см3 до нуля
(точка А) и от нуля до Qном (точка Б) за время 0,02 с с помощью распределителя
с ручным управлением, на выходе из которого установлен гидромотор с V0=40 см3,
в гидросистеме появляются значительные пики давления.
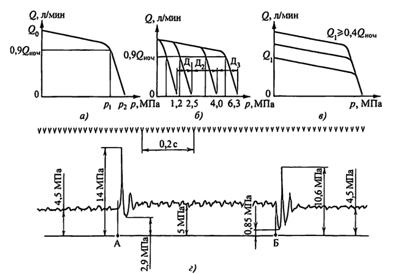
Рисунок 1.6 - Статические характеристики насоса
Г12-5 (а-в) и осциллограмма переходящего процесса (г)
В настоящее время передовые зарубежные фирмы применяют насосы прямого управления в основном в нижней части диапазона рабочих объемов.[6]
Для повышения давления до 70 МПа необходима разработка поршневого насоса с автоматическим управлением по давлению.
Целью создания новой поршневой гидравлической машины является повышение герметичности полости высокого давления, за счет чего повышаются механические и гидравлические характеристики поршневых машин, работающих в насосном и двигательном режимах.
Данный механизм позволяет повысить объемный
к.п.д. машины, предельные значения давления и скорости, снизить вес,
приходящийся на единицу мощности и момента.
. Конструкторская
часть
2.1 Разработка конструкции насоса
Радиально-плунжерный насос (см. лист ВКР.15.04.01.09.008.02.01.00.00 СБ) имеет корпус, состоящий из двух частей 6 и 21, соединенных между собой обоймой 20. В корпусе на подшипниках качения 58 установлен эксцентриковый вал 4, на эксцентричной шейке которого установлен подшипник качения, а на нем обойма 7, которая, кроме того, соединена с корпусом штифтами 54 и серьгой 38.
В корпусе 21 насоса имеется ряд радиальных отверстий, в которых установлены гильзы 24. Внутри гильз находятся поршни 23, которые внешними концами через башмаки 22 с шаровыми опорами контактируют с рычагами 29. Рычаги вторым концом опираются на обойму 7 через ролики 26, образуя опору качения, сепарирование роликов в которой осуществляется за счет того, что ролики имеют винтовые канавки, а в контактных поверхностях рычагов и обоймы смонтированы планки 25 и 27, установленные под углом наклона винтовой линии ролика и входящие с ним в зацепление.
Третьей опорой рычага служат ролики 28, установленные в сепараторах 2 и 3. Прижим поршней к рычагам и рычагов к роликам 26 и обойме 7 осуществляется пружинами 39.
Сепараторы 2 и 3 могут совершать качательное движение относительно оси вращения вала машины, с помощью пружин 41 и плунжеров 31, установленных в расточках корпуса, через пальцы 36, входящие в пазы сепараторов. Регулирование натяжения пружины 41 осуществляется стаканом-винтом 30.
Полости всех цилиндров соединяются через нагнетательные клапаны 14 и 19 с полостями давления соответствующей секции и через всасывающие клапаны 10 - с общей полостью всасывания. Все клапаны имеют наряду с гидравлическим управлением также и механическое - от кулачков 9, 15 и 18, которые позволяют работать машине как в насосном, так и в двигательных режимах, а также устраняют стук клапанов.
Кулачки установлены на валике 5, который вторым концом установлен в отверстие вала 4 и соединен с ним с помощью винта 34.
Давление также подается через торцы плунжеров 31 из соответствующей секции через каналы в корпусе и трубку 43.
Насосы имеют фланцевое исполнение, позволяющее крепить его непосредственно к электродвигателю.
Работа насоса происходит следующим образом. При вращении эксцентрикового вала 4 обойма 7 совершает сканирующее движение, заставляя совершать качательные движения рычаги 29 вокруг точки контакта последних с роликами 28. Благодаря этому поршни 23 совершают возвратно-поступательное движение. Величина хода поршней зависит от соотношения плеч рычагов, которое регулируется перемещением роликов 28 с помощью сепараторов, приводимых в движение плунжерами 31, что позволяет осуществить управление по давлению. При этом ролики обкатываются без скольжения по контактным поверхностям обоймы 20 и рычагов.
При движении поршней во внутрь цилиндров масло вытесняется через нагнетательные клапаны 14 и 19 и в одну из двух нагнетательных плоскостей. При обратном движении поршней, осуществляемыми пружинами 39, происходит всасывание масла через всасывающие клапаны 10 из общей сливной полости.
Основной особенностью конструкции насоса является возможность регулирования геометрической подачи двух независимых друг от друга потоков в широком диапазоне. Применение подвижных опор рычагов в виде двух роликов позволит уменьшить мощность, затрачиваемую на регулирование за счет устранения трения скольжения. Это, а также выполнение контакта рычагов с обоймой 7 в виде опоры качения, позволяет повысить механический к.п.д. насоса.
Выполнение устройства сепарирования в виде винтовой передачи устраняет дополнительные подвижные детали - сепараторы - и, следовательно уменьшает инерционные массы и уровень шума.
Применение клапанного распределения, отличающегося герметичностью и простотой конструкции, а также управление производительностью насоса по давлению в напорной магистрали, позволит повысить объёмный к.п.д. привода.
Механическая и гидравлическая схемы насоса
обеспечивают наибольшую технологичность конструкции с учетом изготовления его
на неспециализированном предприятии.
2.2 Гидравлические расчеты насоса
Исходные данные:
Производительность насоса
![]()
![]() ;
;
Скорость вращения приводного вала
![]()
![]() ;
;
Мощность приводного электродвигателя
![]()
![]() ;
;
Рабочее давление
![]()
![]() .
.
2.2.1 Определение диаметра поршня
 мм, (2.1)
мм, (2.1)
где d - диаметр поршня, мм;- производительность насоса, см3 /с;- число поршней; k = 5;- длина хода поршня, мм; l = 12 мм;
η - объемный к.п.д. насоса; η = 0,9.
 ;
;
Принимаем d = 30 мм.
2.2.2 Гидравлический расчет клапанов
При расчете исходим из максимального расхода жидкости через клапан и максимально допустимой скорости истечения жидкости.
Должно выполняться условие:
 см/с, (2.2)
см/с, (2.2)
где υж.max - максимальная скорость истечения жидкости, см/с;кл - площадь проходного сечения клапана, см2;- максимальный расход жидкости через клапан, см3/с;
[υmax] - максимально допустимая скорость истечения жидкости, см/с;
По данным работ [3, 4] скорость движения масла в клапанах управления не должна превышать следующих значений:
для нагнетательного клапана
[υmax]н = 6 м/с = 600 см/с;
для всасывающего клапана
[υmax]вс = 3 м/с = 300 см/с.
Здесь и в дальнейших расчетах параметры с индексом “н” относятся к нагнетательному клапану, а с индексом “вс” - к всасывающему клапану.
Максимальный расход жидкости
Qmax = υп.max · Fп , см3/с
(2.3)
где υп.max
- максимальная скорость поршня, см/с;п - площадь поршня, см2;
![]() см2;
см2;
![]() ,
,
где n - скорость вращения приводного вала, об/с;- величина эксцентриситета шейки вала, см, e = 0,6 см;
Следовательно,
υп.max = 24,2· 0,6 = 14,52 см/с;= 14,52·7,065 = 102,6 см3/с;
Минимальная площадь проходных сечений клапанов:
 см2;
см2;
 см2.
см2.
Минимальная высота подъема клапанов:
 , мм (2.4)
, мм (2.4)
где dкл. - диаметр клапана, см;
Исходя из конструктивных соображений, принимаем:
![]() = 1,2 см;
= 1,2 см;
![]() = 1,6 см;
= 1,6 см;
Следовательно,
 мм;
мм;
 мм.
мм.
Окончательно принимаем:н = 0,5 мм;вс = 0,5 мм.
2.3 Прочностные расчеты насоса
2.3.1 Расчет усилий пружин клапанов
Расход через клапан определяется выражением [5]:
 , (2.5)
, (2.5)
где Qкл. - расход, см3/с;
μ - коэффициент расхода щели;
μ = 0,7 для плоской щели;щ - площадь проходного сечения щели, см2;- площадь седла клапана, см2;
ρ - плотность жидкости, кг/см3;кл. - вес клапана, Н;- сила начального поджатия пружины, Н.
Тогда
 , Н (2.6)
, Н (2.6)
Для всасывающего клапана:
![]() Н;
Н;
![]() см3/с;
см3/с;
![]() см2;
см2;
![]() см2.
см2.
(из конструктивных соображений)
 Н;
Н;
Для нагнетательного клапана:
![]() Н;
Н;
![]() см3/с;
см3/с;
![]() см2;
см2;
![]() см2.
см2.
 Н;
Н;
Принимаем
![]() Н.
Н.
.3.2 Расчет усилия пружины возврата поршня
При работе поршня в режиме всасывания пружина должна преодолеть силу разрежения жидкости в рабочей клетке и инерционные силы:
п.п. = Pp + Pин. Н; (2.7)
где Rп.п. - усилие пружины возврата поршня, Н;- сила разрежения жидкости в рабочей клетке, Н;ин. - сила инерции подвижных частей, Н.
Сила разрежения жидкости в рабочей клетке определится как
= 100 · Pц.· Fп Н, (2.8)
где Pц. - величина разрежения в рабочей клетке цилиндра, МПа;п - площадь рабочей поверхности поршня, см2.
Учитывая, что давление жидкости в линии
всасывания равно атмосферному, величина разрежения жидкости в цилиндре будет
численно равна перепаду давления в клапане, которое определится по формулам
[5].
 МПа, (2.9)
МПа, (2.9)
Подставляя численные значения, находим
 МПа,
МПа,
Следовательно, Pц. = 0,0025 МПа.
Площадь рабочей поверхности поршня Fп = 7,065 см2;
тогда,= 100 · 0,0025 · 7,065 = 1,77 МПа;
Сила инерции подвижных частей:
ин. = mпр. · aп.max МПа,
где mпр. - масса подвижных частей, приведенная к
поршню, кг;п.max - максимальное ускорение поршня, м/с2;
 кг, (2.10)
кг, (2.10)
где mп. - масса поршня, кг; mп. = 0,032 кг;б. - масса башмака, кг; mб. = 0,008 кг;- момент инерции рычага относительно оси поворота, кг·м2;
ω5 - угловая скорость рычага, рад/с;
υп.- скорость поршня, м/с;. - масса ролика 4 (см. рис. 3.1.), кг; m4. = 0,024 кг;
υ4- скорость движения ролика 4, м/с;
Учитывая, что
 ,
,
где l1 - длина плеча рычага, контактирующего с
поршнем, в м, а также то, что:
 ,
,
где l2 - длина плеча рычага, контактирующего с
роликом, в м, получаем:
 ; (2.11)
; (2.11)
Момент инерции рычага относительно оси поворота
определяется зависимостью
= Jcz + m5 · d2, (2.12)
где d - расстояние от центра масс рычага до центра вращения рычага, точки 0 подвижной опоры 9, м;- момент инерции рычага относительно оси CZ, проходящей через центр масс системы и перпендикулярной к плоскости OXY, кг·м2; =3,88 · 10-5 кг·м2. (из конструктивных соображений)