Материал: Разработка автоматизированного мобильного робота
Трехфазные бесколлекторные двигатели наиболее
распространённый вид бесколлекторных двигателей. Но они могут быть и одно,
двух, трех и более фазными. Чем больше фаз, тем более плавное вращение вала
двигателя, но и сложнее система управления двигателем. 3-х фазная система
наиболее оптимальна по соотношению эффективность/сложность, поэтому и получила
столь широкое распространение. Три обмотки соединяются по схеме
"звезда" или "треугольник". [5]
1.2.3 Шаговые двигатели
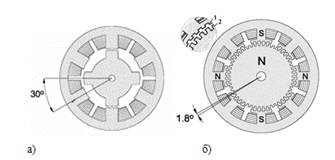
Шаговый электродвигатель - это синхронный бесщёточный электродвигатель с
несколькими обмотками (см. рисунок 4.а.), в котором ток, подаваемый в одну из
обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток
двигателя вызывает дискретные угловые перемещения (шаги) ротора. [5]

а) Общий вид б) Упрощённая схема
Рисунок 4 - Шаговый двигатель
Конструктивно шаговые электродвигатели (см. рисунок 4.б) состоят из статора 1, на котором расположены обмотки возбуждения 2, и ротора 3, выполненного из магнито-мягкого или из магнито-твёрдого материала. Шаговые двигатели с магнитным ротором позволяют получать больший крутящий момент и обеспечивают фиксацию ротора при обесточенных обмотках.
Использование магнитомягких и магнитотвёрдых материалов для ротора позволило обьеденить два вида шаговых двигателей в один, который называют гибридным шаговым двигателем. Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами.
Статор гибридного двигателя также как и другие виды
шаговых двигателей имеет зубцы, обеспечивая уменьшения градуса поворота ротора
шагового двигателя за один шаг (см. рисунок 5). Обычно используются 4 основных
полюса для шага с поворотом ротора на 3,6 градусов, 5-8 основных полюсов для
1,8-0,9 градусов.
- зубцы статора, 2 - зубцы ротора
Рисунок 5 - Перемещение ротора ШД на шаг при а)
отсутствии и б) наличии зубцов на статоре и роторе
Ротор гибридного двигателя также имеет зубцы, расположенные в осевом направлении. Ротор разделен на две части, между которыми расположен цилиндрический постоянный магнит. Таким образом, зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки - южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними. Шаговые двигатели создают сравнительно высокий момент при низких скоростях вращения. Момент существенно падает при увеличении скорости вращения. Однако динамические характеристики двигателя могут быть существенно улучшены при использовании электрических схем управления использующие ШИМ, со стабилизацией тока.
Шаговые электродвигатели применяются в приводах машин и механизмов, работающих в старт-стопном режиме, или в приводах непрерывного движения, где управляющее воздействие задаётся последовательностью электрических импульсов, например, в станках с ЧПУ. В отличие от сервоприводов, шаговые приводы позволяют получать точное позиционирование без использования обратной связи от датчиков углового положения. Шаговые двигатели с постоянными магнитами могут использоваться в качестве датчиков угла поворота благодаря возникновению ЭДС на обмотках при вращении ротора.
Преимущества шаговых двигателей:
Главное преимущество шаговых двигателей - это точность. При подаче потенциалов на обмотки ротор шагового двигателя повернется строго на определенный угол. Шаговый двигатель дешевле сервоприводов, и как недорогая альтернатива сервопривода, он наилучшим образом подходит для автоматизации отдельных узлов и систем, где не требуется высокая динамика.
Недостатки шаговых двигателей:
Возможность "проскальзывания" ротора -
наиболее известная проблема этих двигателей. Это может произойти при превышении
нагрузки на валу, при неверной настройке управляющей программы (например,
ускорение старта или торможения не адекватно перемещаемой массе), при
приближении скорости вращения к резонансной. Электрически это никак не может
быть замечено, поэтому контроллер все последующие движения будет производить с
ошибкой. Для ответственных применений устанавливают датчики обратной связи
(контроль вращения или перемещения), но такие датчики достаточно дороги.
Наличие датчика позволяет обнаружить проблему, но автоматически скомпенсировать
её без остановки производственной программы возможно только в очень редких
случаях. [6]
.2.4 Сервоприводы
Сервопривод - это электромотор с редуктором, управляемый через
отрицательную обратную связь, которая точно управлять параметрами движения.
Сервопривод изображён на рисунке 6.

Рисунок 6 - Сервопривод
Сервоприводы различаются по размерам. И хотя официальной классификации не
существует, производители давно придерживаются нескольких размеров с
общепринятым расположением крепёжных элементов.
Таблица 1 - Габариты сервоприводов
|
Габариты |
Вес |
Линейные размеры |
|
Маленькие |
8-25 грамм |
22×15×25 мм |
|
Стандартные |
40-80 грамм |
40×20×37 мм |
|
Большие |
50-90 грамм |
49×25×40 мм |
Бывают ещё так называемые сервоприводы "специального вида" с габаритами, не попадающими в данную классификацию, однако процент таких сервоприводов весьма мал.
Сервоприводы бывают аналоговые и цифровые. Внешне они ничем не отличаются: электромоторы, редукторы, потенциометры у них одинаковые, различаются они лишь внутренней управляющей электроникой. Вместо специальной микросхемы аналогового сервопривода у цифрового аналога можно заметить на плате микропроцессор, который принимает импульсы, анализирует их и управляет мотором. Таким образом, в физическом исполнении отличие лишь в способе обработки импульсов и управлении мотором.
Оба типа сервопривода принимают одинаковые управляющие импульсы. После
этого аналоговый сервопривод принимает решение, надо ли изменять положение
вала, и в случае необходимости посылает сигнал на мотор. Происходит это обычно
с частотой 50 Гц. Таким образом, получаем 20 мкс - это минимальное время
реакции. В это время любое внешнее воздействие способно изменить положение вала
сервопривода. В состоянии покоя (когда нет необходимости вращать вал) на
электромотор не подаётся напряжение, в случае небольшого отклонения положения
вала на электромотор подаётся короткий сигнал малой мощности и чем больше
отклонение положения вала, тем мощнее подающийся на электромотор сигнал. Таким
образом, при малых отклонениях сервопривод не сможет быстро вращать мотор или
развивать большой момент для возвращения вала в положение равновесия.
Образуются "мёртвые зоны" по времени и расстоянию. Подобные проблемы
можно решать за счёт увеличения частоты приёма, обработки сигнала и управления
электромотором. Цифровые сервоприводы используют специальный процессор, который
получает управляющие импульсы, обрабатывает их и посылает сигналы на мотор с
частотой 200 Гц и более. Это позволяет цифровому сервоприводу быстрее
реагировать на внешние воздействия, быстрее развивать необходимые скорость и
крутящий момент, а значит, лучше удерживать заданную позицию. Конечно, при этом
он потребляет больше электроэнергии. Также цифровые сервоприводы сложнее в
производстве, а потому стоят заметно дороже. Собственно, эти два недостатка -
все минусы, которые есть у цифровых сервоприводов. В остальном они
безоговорочно побеждают аналоговые сервоприводы. [7]
.3 Выбор микроконтроллера
Микроконтроллер является важной частью мобильного робота. Используя микроконтроллер в качестве ключевого вычислительного и логического устройства управляющей системы мобильного робота, возникает потребность в высокой частоте работы, и больших объемах оперативной памяти этого микроконтроллера.
Существует множество микроконтроллеров и уже готовых печатных плат позволяющих упрощает процесс работы с микроконтроллерами и осуществлять физические вычисления, такие печатные платы предлагают схожую функциональность. Все эти устройства объединяют разрозненную информацию о программировании и создают из неё удобную в использовании конструкцию. Выбранная для рассмотрения микроконтролльная печатная плата (марки Ардуино (англ. Arduino)), в свою очередь, тоже упрощает процесс работы с микроконтроллерами.
Микроконтроллеры "ATMEGA8" и "ATMEGA168" (см. рисунок 7) являются основой для печатных плат марки "Ардуино" (пример печатной платы представлен на рисунке 8). [2]
Выбранная для рассмотрения микроконтроллерная печатная плата имеет ряд преимуществ перед другими устройствами для потребителя:
Простая и понятная среда программирования - среда
программирования микроконтроллерных печатных плат, марки "Ардуино",
подходит как для начинающих разработчиков, так и для опытных. Программное
обеспечение (ПО) с возможностью расширения и открытым исходным текстом, это
значит, что среда программирования микроконтроллерных печатных плат марки
"Ардуино" выпускается как программа, которая может быть изменена
опытными пользователями по необходимости.
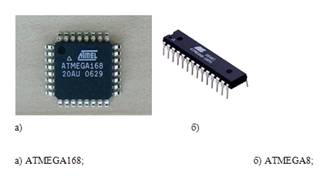
Рисунок 7 - Микроконтроллеры
Язык программирования может дополняться библиотеками C++. Также при необходимости разработчик имеет возможность перейти на язык "AVR C" на котором основан язык "C++". Соответственно, имеется возможность добавить код из среды "AVR-C" в программу программирования микроконтроллерных печатных плат.
Аппаратные средства имеют возможность расширения так
как принципиальные схемы выложены в свободный доступ. Микроконтроллеры
"ATMEGA8" и "ATMEGA168" (см. Рисунок 7) являются основой
для печатных плат марки "Ардуино" (пример печатной платы представлен
на Рисунке 8). Схемы микроконтроллерных печатных плат, марки
"Ардуино", выпускаются с лицензией, а значит, опытные инженеры имеют
возможность создания собственных версий таких устройств, расширяя и дополняя
их. Даже обычные пользователи могут разработать опытные образцы с целью
экономии средств. Топологии данных печатных плат находятся в свободном доступе.
[9]

Рисунок 8- Микроконтроллерная печатная плата (торговой
марки "Arduino")
Вывод
Судя по классификации (представленной в пункте 1.1) и обозначенной во введении задачи, материалом корпуса может быть любой материал используемый для конструкций твёрдотельных роботов. Для экономии денег и создания малогобаритного лёгкого робота хорошо подойдёт пластик. В качестве основного двигателя мобильного робота хорошо подойдёт простой в управлении, достаточно мощный и имеющий большой КПД - коллекторный электродвигатель постоянного тока. Для рулевого управления подойдёт точный и с хорошим моментом силы сервопривод.
В качестве управляющей системы была выбрана
Микроконтроллерная печатная плата "Arduino Uno" которая обладает
необходимым количеством вход/выходов и необходимой оперативной памятью и
частотой работы.
2. Теоретическая часть
.1 Коллекторные электродвигатели
Коллекторный электродвигатель - электрическая машина, в которой датчиком положения ротора и переключателем тока в обмотках является одно и то же устройство - щеточно-коллекторный узел.
Самые маленькие двигатели данного типа (единицы Ватт) содержат в корпусе:
) трёхполюсной ротор на подшипниках скольжения;
) коллекторный узел из двух щёток - медных пластин;
) двухполюсной статор из постоянных магнитов.
По функциональному назначению коллекторные двигатели постоянного тока (ДПТ) подразделяются на силовые и управляемые. В свою очередь, силовые электродвигатели выполняются со стабилизацией и без стабилизации частоты вращения. А управляемые коллекторные двигатели регулируют частоту вращения двигателя с помощью электроники.
Двигатели с центробежно-вибрационными регуляторами частоты вращения имеют стабильность в пределах ±2-5%. Точность стабилизации частоты вращения двигателей с электронными регуляторами зависит от принятой системы стабилизации. Статическая система стабилизации обеспечивает стабильность частоты вращения до ±0,5%, астатическая система - с точностью, определяемой стабильностью частоты эталонного источника.
Важным функциональным свойством двигателей является быстродействие, которое определяется в основном конструктивным исполнением и видом возбуждения. Двигатели с зубцовым якорем имеют постоянную времени 30-100 мс, с полым якорем 15-20 мс, с гладким и печатным якорями 5-10 мс. [4]
Одним из основных требований, предъявляемых к исполнительному двигателю, является его быстродействие. Время разгона исполнительного двигателя определяется главным образом электромеханическими процессами, так как из-за значительного активного сопротивления ротора электромагнитные переходные процессы, происходящие в двигателях очень быстротечны. Обычно быстродействие двигателя характеризует его электромеханическая постоянная времени Тм, которая примерно на порядок выше электромагнитной постоянной времени Тэм=L/R, обусловленной индуктивностью двигателя. Значение Тм определяется из условий разгона ротора двигателя при статическом моменте на валу Мст=0. При этом основное уравнение динамики
= Мст + J dω/dt (2.1)
M = J dω/dt (2.2)
Где- момент инерции вращающихся масс.
Для идеализированного двигателя при линейной механической характеристике
М = Мп (1 - ω/ω0) (2.3)
Где
Мп - пусковой момент; ω0 - угловая скорость холостого хода.
Следовательно, с учетом (2.3) уравнение (2.2) можно представить в виде
Мп (1 - ω/ω0) = J dω/dt (2.4)
dω/(ω0 - ω) = Мп dt/(J ω0) = (1/Тм) dt (2.5)
Тм = J ω0 /Мп (2.6)
Решая (2.5), получаем уравнение
ω = ω0(1 - е-t/Тм) (2.7)
по которому можно построить кривую разгона двигателя (см. рисунок 9). Из нее видно, что угловая скорость вращения ω стремится асимптотически к установившемуся значению ω0; при t = Тм угловая скорость ω = ω0(1-е-1) = 0,633ω0. Следовательно, постоянную Тм можно рассматривать как время разгона двигателя до угловой скорости, соответствующей 0,633ω0
Двигатели с зубцовым якорем имеют постоянную времени 30-100 мс, с полым
якорем 15-20 мс, с гладким и печатным якорями 5-10 мс. [4]
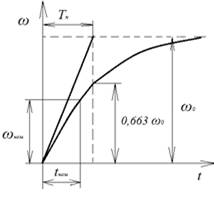
Рисунок 9 - Кривая разгона двигателя
По некоторым мнениям коллекторные электродвигатели постоянного тока можно
еще назвать синхронной машиной постоянного тока с самосинхронизацией.
Простейший двигатель (см.рисунок 10), являющийся машиной постоянного тока,
состоит из постоянного магнита на индукторе (статоре), одного электромагнита с
явно выраженными полюсами на якоре (двухзубцового якоря с явно выраженными
полюсами и с одной обмоткой), щёточноколлекторного узла с двумя пластинами
(ламелями) и двумя щётками.
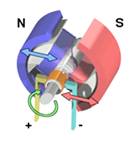
Рисунок 10 - Устройство простейшего колекторного двигателя постоянного
тока
Простейший двигатель имеет два положения ротора (две "мёртвые точки"), из которых невозможен самозапуск, и неравномерный крутящий момент. В первом приближении магнитное поле полюсов статора равномерное (однородное). Из-за наличия угловой ширины щёток и углового зазора между пластинами (ламелями) коллектора в двигателе этой конструкции имеются динамически постоянно короткозамкнутые щётками части обмотки ротора. Число короткозамкнутых частей обмотки ротора равно числу щёток. Эти короткозамкнутые части обмотки ротора не участвуют в создании общего крутящего момента.