Материал: Разработка автоматизированного мобильного робота
Разработка автоматизированного мобильного робота
Введение
мобильный робот двигатель микроконтроллер
Открытие и освоение электричества положило начало новому виду двигателей, преобразующих электромагнитную индукцию в механическое движение. Такие двигатели, назывались электрическими. Электродвигатель, как правило, компактнее других двигателей, всегда готов к работе, может управляться на расстоянии. Кроме того, с внедрением электромоторов впервые появилась возможность не только снабдить любой станок своим собственным двигателем, но и поставить отдельный привод на каждый его узел.
Ещё одно направление освоения электричества - электроника. Развитие электроники открыло для человека новые возможности, а некоторые отрасли этой науки, такие как микроэлектроника и наноэлектроника, которые избрали направлением развития создание электрических схем с высокой производительностью и малым размером, малыми потреблениями энергии и высокой чистотой работы. Позволили уменьшить процессоры и микроконтроллеры, логические схемы и запоминающие устройства, уменьшить их электропотребление и увеличить их способности к оперированию большими объёмами информации. Новые возможности, открытые микроэлектроникой и наноэлектроникой положили начало развитию такой отрасли промышленности как робототехника, которая в свою очередь, по мнению многих учёных, откроет для человечества новые горизонты и возможности.
В настоящее время промышленные роботы плотно закрепились в отраслях машиностроения, приборостроения и других отраслях, где необходима точность сборки и высокая производительность труда. Мобильные роботы находят все более широкое применение для выполнения различных задач в условиях, когда присутствие человека в зоне их работы или невозможно по соображениям безопасности, либо же нежелательно из-за ограничения производительности обслуживаемого технологического оборудования.
Специфические особенности робототехнических устройств как управляемых объектов обусловлены в первую очередь многообразием видов действий и траекторий движений. Выбор конкретных действий из данного количества комбинаций и вариаций этих движений, важная задача которая решатся системой с помощью человека-оператора (в режиме обучения), или автоматически при наличии соответствующих управляющих программ и технических средств сбора и обработки информации о среде. Ввиду своей оперативности мобильные роботы широко используются практически во всех сферах жизнедеятельности человека, особенно в военных и промышленных областях, а также, например, при исследовании других планет.
Решения о том, как и куда будет двигаться робот, то есть планирование перемещения мобильного робота является важнейшей проблемой функционирования автономных робототехнических систем и одной из наиболее активно исследуемых областей современного научно-практического знания. Механически, робот напоминает системы с большим количеством приводов (например, на механической руке), а в таких системах прослеживается динамическое взаимодействие, которое не позволяет рассматривать систему робота как совокупность множества маленьких (равных по значимости) автономных систем. Эти особенности робототехнических устройств приводят к необходимости построения иерархических структур систем управления. С точки зрения управляющих систем возникает проблема реального времени, которая заключается в том, что вычислительная техника, даже в наше время, не успевает справиться с поставленными задачами и зачастую сдерживает темп движений робота. Эту проблему решает грамотно поставленная задача, и правильно написанный программный код.
Программирование зачастую ведётся на основе расчётов по математической модели робота, т.е. применяется так называемое аналитическое программирование.
Задание для курсового проектирования заключается в разработке
автоматизированного мобильного робота, включающего в себя исполнительную
систему и систему управления, выбор компонентов этих систем.
. Обзор схемы конструкции автоматизированного мобильного робота. Выбор
компонентов конструкции
Определяясь с конструкцией робота, требуется проклассифицировать его с учётом задачи обозначенной во введении. После этого подобрать подходящие материалы корпуса, двигатели и механизмы. Это позволит свести к минимуму незапланированные изменения конструкции при последующем проектировании, создании и испытании робота.
Робот (чеш. robot, от robota - подневольный труд)- автоматическое
устройство, созданное по принципу живого организма. Действуя по заранее
заложенной программе и получая информацию о внешнем мире от датчиков, робот
самостоятельно осуществляет производственные и иные операции, обычно
выполняемые человеком (либо животными). При этом робот может, как и иметь связь
с оператором (получать от него команды), так и действовать автономно. [8]
.1 Классификация роботов
Основу современного робота составляет совокупность исполнительных механизмов и устройств с системами привода, позволяющих взаимодействовать со средой при выполнении той или иной поставленной задачи.
Привод - совокупность устройств, предназначенных для приведения в действие машин и механизмов.
Функциональные возможности робота, его универсальность и соответствие характеристикам определяется в первую очередь разнообразием действий которые может выполнить робот.
Список перечня операций для выполнения, которых предназначен робот, бывает разным, в зависимости от этого списка различаются роботы специальные, специализированные и универсальные. Специальные роботы предназначены для выполнения одной конкретной задачи. Специализированные роботы могут выполнять несколько однотипных операций. Универсальные роботы могут выполнять различные основные и вспомогательные операции в пределах их технических возможностей. Увеличение степени универсальности робота расширяет область его возможных применений, но одновременно неизбежно сопровождается недоиспользованием этих возможностей на каждой конкретной операции, а также удорожанием робота. Оптимальные в этом отношении являются специальные роботы, но с другой стороны это предельно сужает их рынок, а, следовательно, и объём производства. [1]
Манипуляционный робот - автоматическая машина (стационарная или передвижная), состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и устройства программного управления, которая служит для выполнения в производственном процессе двигательных и управляющих функций. Такие роботы производятся в напольном, подвесном и портальном исполнениях. Получили наибольшее распространение в машиностроительных и приборостроительных отраслях.
Мобильный робот - это автоматическая машина, в которой имеется движущееся шасси с автоматически управляемыми приводами.
Мобильные роботы могут быть колёсными, шагающими и гусеничными (существуют также ползающие, плавающие и летающие мобильные робототехнические системы) в зависимости от рода и условий эксплуатации. [3]
Классификация роботов по показателям, определяющих их конструкцию. К таким показателям относиться:
) тип приводов;
) грузоподъёмность;
) количество манипуляторов;
) тип и параметры их рабочей зоны;
) подвижность и способ размещения;
) использование по назначению.
Приводы, которые используются в манипуляторах и системах передвижения роботов, могут быть электрическими, гидравлическими и пневматическими. Часто их применяют в комбинации.
Грузоподъёмность робота - это грузоподъёмность его манипуляторов, а для транспортного робота ещё и его шасси.
Количество манипуляторов у роботов в большинстве случаев ограничено одним. Однако в зависимости от назначения существуют конструкции роботов без манипуляторов и с 2, 3 и совсем редко 4 манипуляторами.
Тип и параметры рабочей зоны манипулятора определяют область окружающего робот пространства, в пределах которой он может выполнять манипуляции, не передвигаясь, т.е. при неподвижном основании.
Подвижность робота определяется наличием или отсутствием у робота системы передвижения. В первом случае роботы называют мобильными, а во втором стационарными.
По способу размещения стационарные и мобильные роботы бывают напольными, подвесными и встраиваемые в другое оборудование.
Использование робота по назначению зависит от внешних условий, в которых он должен функционировать. Различают исполнение нормальное, пылезащитное, теплозащитное, влагозащитное, взрывобезопасное и т.д.
Классификация автоматических роботов по способу управления:
) программные;
) адаптивные;
) интеллектуальные.
Программное устройство управления. Такие устройства функционируют по заранее заданной программе, в основном предназначены для решения однообразных задач в неизменных условиях окружения.
Адаптивное устройство управления. В таких системах управление осуществляется исходя из полученной информации о текущем состоянии внешней среды и самого робота, получаемой в процессе управления от сенсорных устройств (решают типовые задачи, и адаптируются под условия функционирования програмно исходя из данных полученых от информационной системы).
Интеллектуальное устройство управления. Эти системы для адаптации и выполнения других функций робота используют методы искусственного интеллекта. [2]
Устройства управления могут быть индивидуальными, входящими в состав каждого робота и групповыми, управляющими несколькими роботами. Конструктивно индивидуальные устройства управления выполняют обычно отдельно от механической части робота, значительно реже в общем корпусе. Мобильные роботы обычно имеют устройство управления состоящее из 2-х частей - бортовой и входящей в состав пульта оператора (или в дополнение к нему).
Подавляющее большинство роботов имеет электронные
устройства управления, выполненные на микроконтроллере. Однако существуют и
неэлектрические устройства управления роботов, часто реализуемых на пневматике
и предназначенных для применения в особых взрывоопасных и пожароопасных
условиях, также в условиях повышенных температур. [1]
.2 Виды двигателей
Проектируя мобильного робота необходимо понимать, что он предполагает в своей конструкции двигатели (моторы), которые будут вращать и (или) передвигать части конструкции или всю конструкцию.
Двигатель (мотор) - устройство преобразующее какой-либо вид энергии в механическую. [10]
Двигатели подразделяются на:
а) электродвигатели;
б) двигатели внутреннего сгорания;
в) паровые двигатели.
Разные конструкции мобильных роботов отдают предпочтения разным видам двигателей. Технологически целесообразно рассматривать электрические двигатели постоянного тока, преобразующие электрическую энергию в механическое вращение, так как они позволяют упростить программный контроль, схему и конструкцию мобильного робота.
Электродвигатели постоянного тока в свою очередь делятся на:
а) коллекторные двигатели постоянного/переменного тока;
б) бесколлекторные двигатели постоянного/переменного тока;
в) шаговые двигатели;
г) сервоприводы аналоговые/цифровые.
.2.1 Коллекторные двигатели постоянного тока
Коллекторный электродвигатель - электрическая машина, в которой датчиком положения ротора и переключателем тока в обмотках является одно и то же устройство - щеточно-коллекторный узел. Коллекторный электродвигатель изображён на рисунке 1.
Основным достоинством коллекторных двигателей постоянного тока (ДПТ)
является возможность регулирования частоты вращения в широком диапазоне,
линейность механической и, в большинстве случаев, регулировочной характеристики,
большой пусковой момент, высокое быстродействие, малая масса и объем на единицу
полезной мощности и более высокий КПД по сравнению с двигателями переменного
тока той же мощности. Недостатком коллекторных двигателей постоянного тока
является наличие щеточно-коллекторного узла, что ограничивает их долговечность
и является источником радиопомех. Вследствие искрения на скользящем контакте
эти двигатели не пригодны для эксплуатации во взрывоопасных средах. [4]

Рисунок 1 - Коллекторный двигатель
По функциональному назначению коллекторные двигатели постоянного тока подразделяются на силовые и управляемые. В свою очередь, силовые электродвигатели выполняются со стабилизацией и без стабилизации частоты вращения.
Двигатели с центробежно-вибрационными регуляторами частоты вращения имеют стабильность в пределах ± (2-5)%. Точность стабилизации частоты вращения двигателей с электронными регуляторами зависит от принятой системы стабилизации. Статическая система стабилизации обеспечивает стабильность частоты вращения до ±0,5%, а статическая система - с точностью, определяемой стабильностью частоты эталонного источника.
Центробежный регулятор - механизм, реализующий отрицательную обратную связь для регулировки скорости вращения в машинах разнообразных принципов действия и назначения.
Важным функциональным свойством двигателей является быстродействие, которое определяется в основном конструктивным исполнением и видом возбуждения. Двигатели с зубцовым якорем имеют постоянную времени 30-100 мс, с полым якорем 15-20 мс, с гладким и печатным якорями 5-10 мс.
Для регулирования частоты вращения двигателей с параллельным возбуждением
и с возбуждением от постоянных магнитов применяется в основном якорное
управление, т.е. изменение напряжения питания якорной цепи, при этом
механическая характеристика, не изменяя жесткости, смещается параллельно своему
положению при U = Un0M.. Практические пределы регулирования частоты вращения
двигателей постоянного тока составляют от 1:5 до 1:20. [3]
.2.2 Бесколлекторные двигатели постоянного тока
Конструктивно бесколлекторный двигатель состоит из
ротора с постоянными магнитами и статора с обмотками. Обращая внимание на то,
что в коллекторном двигателе наоборот, обмотки находятся на роторе. Поэтому,
далее в тексте ротор - магниты, статор - обмотки. Для управления двигателем
применяется электронный регулятор.
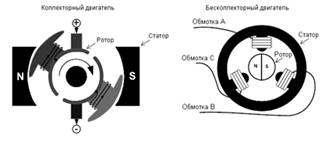
Рисунок 2 - Конструкция коллекторного и бесколлекторного двигателей
На практике бесколлекторные двигатели греются меньше, чем их коллекторные
аналоги. Переносят большую нагрузку по моменту. Применение мощных неодимовых
магнитов сделали бесколлекторные двигатели еще более компактными. Конструкция
бесколекторного двигателя позволяет эксплуатировать его в воде и агресивных
средах (разумеется, только двигатель, подвергать регулятор воздействию влаги
нельзя так как это приводит к короткому замыканию, для профилактики кароткого
замыкания регулятор нужно будет герметезриновать, что соправаждаеться с
большими затратами ресурсов). Бесколлекторные двигатели практически не создают
радиопомех. [4]

Рисунок 3- Бесколлекторный двигатель с внешним ротором в разборе
Единственным недостатком двигателей такого типа считают сложный дорогостоящий электронный блок управления (регулятор). Однако, если необходимо управлять оборотами двигателя, без электроники никак не обойтись. Если вам не надо управлять оборотами бесколлекторного двигателя, без электронного блока управления все равно не обойтись. Бесколлекторный двигатель без электроники - просто железка, нет возможности подать на бесколлекторный двигатель напряжение и добиться нормального вращения как у других двигателей, а подавать напряжение на обмотки двигателя нужно в зависимости от положения ротора. Поэтому электроника должна уметь определять положение ротора двигателя. Для этого применяются датчики положения. Они могут быть различного типа, оптические, магнитные и т.д. В настоящее время очень распространены дискретные датчики на основе эффекта Холла. В трехфазном бесколлекторном двигателе используется 3 датчика. Благодаря таким датчикам электронный блок управления всегда знает, в каком положении находится ротор и на какие обмотки подавать напряжение в каждый момент времени. Существуют бесколлекторные двигатели, которые не имеют датчиков. В таких двигателях положение ротора определяется путем измерения напряжения на незадействованной в данный момент времени обмотке. Данный метод актуален только при вращении двигателя. Когда двигатель не вращается или вращается очень медленно, такой метод не работает.