Материал: Проектирование и исследование кривошипно-ползунного механизма рабочей машины
Для
4-го положения механизма рычаг Н.Е. Жуковского показан на рис. 11. Под
действием указанных сил рычаг находится в равновесии, т.е. сумма моментов сил
относительно точки ![]() его закрепления равна нулю.
его закрепления равна нулю.
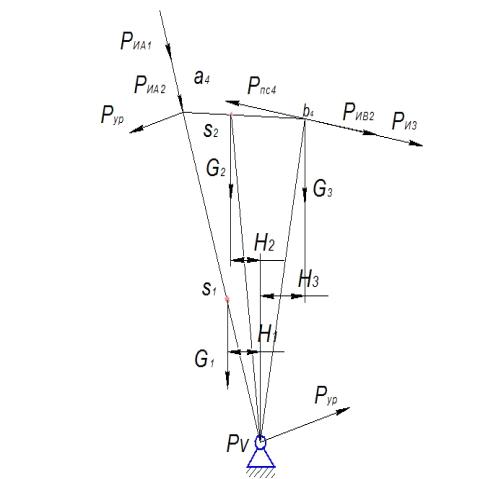
Рис. 11. Схема нагружения рычага Н.Е. Жуковского
![]()
![]()
![]()
![]()
Расхождение результатов, полученных методом планов и методом рычага Н.Е.
Жуковского:
![]()
Аналогичные действия выполним для 5-го положения
Поменяем лишь направление уравновешивающей силы
![]()
![]()
![]()
![]()
2.4 Статическое уравновешивание механизма
Цель статического уравновешивания механизма - уменьшение его переменного силового воздействия на фундамент [1-3].
Силы, действующие на фундамент зависят от сил технологических (или производственных), сил тяжести и сил инерции.
Задача статического уравновешивания - определение параметров противовесов (масс противовесов и радиусов их установки).
На практике наиболее часто выполняется неполное статическое уравновешивание кривошипно-ползунного механизма, при котором на кривошип устанавливается один противовес массой тП на расстоянии lOC от оси О вращения (рис. 12).
Звено 1 заменим массами тА1 и тО1, звено 2 -
массами тА2 и тВ2. Масса тО1 неподвижна и не
оказывает дополнительного переменного воздействия на корпус. Подвижные массы тА1
и тА2 уравновешиваются противовесом тП. Параметры
противовеса должны удовлетворять условию:
![]()
Где: ![]() ;
; ![]() ;
; ![]() ;
;
![]() ;
;
где
![]() - радиус установки противовеса, его величина
выбирается конструктивно.
- радиус установки противовеса, его величина
выбирается конструктивно.
![]()
![]()
![]()
![]()
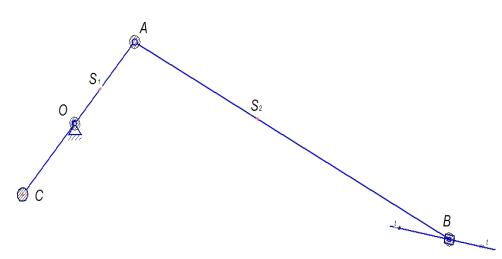
Рис.
12. Схема установки противовесов
Для
нахождения реакции R01
Используем уравнение: ![]() . Данное уравнение будет решено графически ниже.
. Данное уравнение будет решено графически ниже.
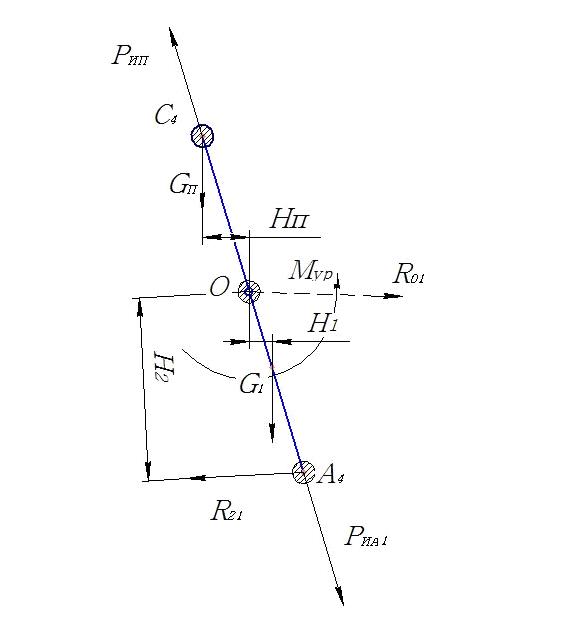
Рис. 13. схема нагружения кривошипа
Обозначим все силы действующие на механизм. Из схемы изображенной на рис.
13 Составим уравнение равновесия и найдём уравновешивающий момент:
![]() ;
;
![]() .
.
Для 4-го положения:
![]()
Для 5-го положения:
![]()
Для
нахождения реакции R01
Используем уравнение: ![]() .Данное уравнение будет решено графически.
.Данное уравнение будет решено графически.

Рис. 14. План сил.
Величина
реакции ![]() :
:
![]()
![]()
Для
4-го положения ![]() H и для 5-го
положения
H и для 5-го
положения ![]() H
H
Это
позволяет сказать, что для 4-го положения ![]() увеличилась
на 8,12%, а для 5-го положения на 8,33 %.
увеличилась
на 8,12%, а для 5-го положения на 8,33 %.
Заключение
Исходя из задания курсовой работы был проведен структурный анализ механизма по принципу Ассура. Определена его подвижность и составлена формула его строения.
Методом планов выполнен кинематический расчет механизма. Методом планов определены скорости звеньев и точек звеньев 12 положений механизма, расчет линейных и угловых ускорений произведен для двух положений рабочего хода (4 и 5), в которых сила полезного сопротивления больше 0.
В ходе выполнения силового расчета была построена диаграмма изменения силы полезного сопротивления, определены реакции в кинематических парах и уравновешивающий момент. Величина последнего определялась методом планов и методом рычага Н.Е. Жуковского. Расхождение результатов расчета составило 0,86% и 6,29% соответственно для 4 и 5 положений.
Был
построен кривошипно-ползунковой механизм, при котором на кривошип
устанавливается противовес массой ![]() , в ходе
построения плана сил, графически была получена реакция
, в ходе
построения плана сил, графически была получена реакция ![]() , которая после установки противовеса уменьшилась на
8,12% для 4-го положения и на 8,33 % для 5-го положения.
, которая после установки противовеса уменьшилась на
8,12% для 4-го положения и на 8,33 % для 5-го положения.
Список литературы
1. Артоболевский И. И. Теория механизмов и машин / И.И. Артоболевский. - М.: Наука, 1975.- 640 с.
2. Рязанцева И.Л. Теория механизмов и машин в вопросах и ответах / И.Л. Рязанцева - Омск: Изд-во ОмГТУ, 2013. - 130с.
. Силовой расчет механизмов: Учебное пособие. Под ред. Н.В. Фролова. Изд-во МВГТУ, 1991. -78с: ил.
4. Рязанцева И.Л. Образец составления пояснительной записки курсового проекта.
. Рязанцева И.Л. Конспект лекций