Материал: Проектирование и исследование кривошипно-ползунного механизма рабочей машины
Проектирование и исследование кривошипно-ползунного механизма рабочей машины
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
К курсовой
работе по теории механизмов и машин на тему: «Проектирование и исследование
кривошипно-ползунного механизма рабочей машины»
Автор проекта: Иваницкий А.С.
Группа ПМ-141, направление “Прикладная Механика ”.
Руководитель работы: Рязанцева И.Л.
В расчетно-пояснительную записку входит: структурный, кинематический, кинетостатический анализ кривошипно-ползунного механизма рабочей системы и расчет параметров противовесов, которое обеспечивающее его не полное статическое уравновешивание. Проведены расчеты уравновешивающих сих двумя способами: по средствам метода плана и методом
«жесткого рычага» Н.Е. Жуковского.
Записка состоит из 29 листов, содержит 14 рисунков и 4 таблицы.
СОДЕРЖАНИЕ
Введение
. КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА
1.1 Структурный анализ механизма
1.2 Разметка механизма
.3 Расчет скоростей методом планов
.4 Расчет ускорений методом планов
. СИЛОВОЙ РАСЧЕТ МЕХАНИЗМА
.1 Силовой расчет структурной группы методом планов
.2 Силовой расчет ведущего звена методом планов
.3 Определение уравновешивающей силы методом «жесткого рычага» Н.Е. Жуковского
.4 Статическое уравновешивание механизма
2.5 Схема нагружения кривошипа
Заключение
Список литературы
ВЕДЕНИЕ
В данной курсовой работе выполнено кинематическое и кинетостатическое исследование механизма рабочей машины.
В ходе кинематического исследования были определены: крайние положения механизма, построена его разметка для 12-ти положений, методом планов выполнен расчет для 12-ти скоростей и для двух положений рабочего хода расчет ускорений.
В ходе кинетостатического анализа для двух положений
механизма методом планов определены реакции в кинематических парах и
уравновешивающая сила (уравновешивающий момент сил). Методом рычага Жуковского
был выполнен расчет уравновешивающего момента сил. А так же было выполнено
Статическое уравновешивание механизма.
. КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА
1.1 Структурный
анализ механизма
В задачи структурного анализа входит определение подвижности механизма и его строения.
На рис.1. представлен кривошипно-ползунный механизм рабочей машины ,который состоит из 4-х звеньев:
0-стойка - неподвижное звено механизма.
-кривошип - звено, связанное со стойкой и поворачивающееся на угол 360◦ ;
-шатун - звено, не связанное со стойкой, совершает плоскопараллельное движение;
-ползун - звено, совершающее возвратно-поступательное движение относительно стойки.
Звенья образуют 4 кинематические пары пятого класса
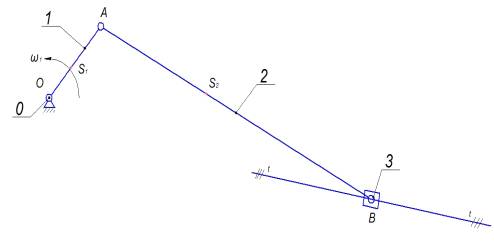
Рис. 1. Кривошипно-ползунный механизм рабочей машины
Подвижность механизма определяется по формуле Чебышева (1.1)
=3 n-2 P5-P4 , (1.1)
где n - количество подвижных звеньев;
Р5 - количество кинематических пар 5 класса;
P4- количество кинематических пар 4 класса.
В данном случае W=3*3-2*4-0=1, это доказывает что, в механизме одно звено, которое должно совершать независимое движение.
Структурная схема механизма приведена на рис. 2.
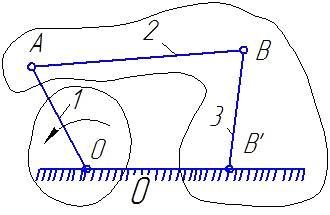
Рис. 2. Структурная схема механизма рабочей машины.
Формула строения механизма:
![]()
Исследуемый
механизм является механизмом II класса.
1.2 Разметка
механизма
Разметка механизма выполняется для определения крайних положений, в дальнейшем скоростей и ускорений механизма.
Для построения разметки необходимо:
) На свободном поле чертежа выбрать ось вращения точку О.
) Выбрать масштабный коэффициент таким образом что бы он был целым числом
или простой десятичной дробью, необходимо добавить, что в последующих
определениях масштабного коэффициента нужно придерживаться этого правила .
Масштабный коэффициент высчитывается по формуле:
![]() , (1.2)
, (1.2)
где
![]() - длина кривошипа , ОА-длина кривошипа используемая на
чертеже, выбранная произвольно
- длина кривошипа , ОА-длина кривошипа используемая на
чертеже, выбранная произвольно
![]()
)
Далее определяем величины приведённые в табл. 1
Таблица 1
|
|
|
e |
|
lAB |
|
|
||||||
|
кинематический размер |
м |
-0,02 |
0,07 |
0,28 |
0,03 |
0,11 |
мм |
-14,29 |
50 |
200 |
21 |
78 |
) Отрезком ОА проводим окружность
) Полученную окружность необходимо разделить на 12 равных частей.
Полученные отрезки будут изображать промежуточное положение кривошипа ОА .
) Для того что бы определить одно из крайних положений механизма складываем длины отрезков ОА и АВ получаем В* и соответственно отнимая ОА и АВ получим В**. Точками В* и В** ставим засечки на направляющей t-t.
От точки В** проведём прямую проходящую через центр О
и доводим прямую до пересечения с окружностью. Полученную точку обозначим как
А0=А*, так как она является началом рабочего хода механизма. Далее от точки В*
таким же образом проводим прямую до пересечения с центром стойки, где прямая
пересекает окружность обозначим за точку А**, эта точка характеризует собой
конец рабочего хода механизма.
7) Из точек А1-А11 необходимо выполнить засечки на направляющей t-t А1 В1, А2 В2…и т.д. Полученные точки на прямой будут
изображать рабочий ход механизма.
) В каждом из положений механизма необходимо найти
точки центров масс S1 и S2, из полученных данных построить
траектории точек.
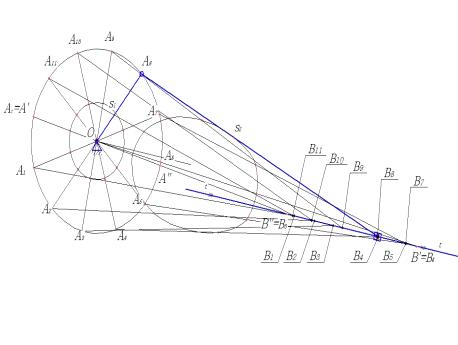
Рис. 3. Разметка механизма
1.3 Расчет скоростей методом
планов
Расчёт плана скоростей для 12-ти положений начинается
с определения скорости точки А, для определения скорости воспользуемся формулой
[1-2]:
![]() .
.
Далее
составим векторное уравнение для нахождения скорости точки В[1-2].
→ → →
VB=VA+VBA, (1.3.)
Скорость
точки VA направлена
перпендикулярно кривошипу в рассматриваемом его положении, вектор VBA направлен перпендикулярно шатуну в рассматриваемом
положении механизма, а ![]() - вдоль направляющей
- вдоль направляющей ![]() ползуна.
ползуна.
Далее необходимо найти масштабный коэффициент, для
этого выберем графический отрезок ![]() примем его равным 98мм. Тогда,
используя формулу приведенную ниже, получим масштабный коэффициент равный:
примем его равным 98мм. Тогда,
используя формулу приведенную ниже, получим масштабный коэффициент равный:
Для построения плана скоростей необходимо:
)
На свободном поле чертежа изобразим полюс
плана скоростей, точку ![]()
) На точке проводим прямую перпендикулярно направляющей t-t
) От точки проводим
прямую перпендикулярно кривошипу в рассматриваемом его положении и откладываем
на нём отрезок ![]()
4) Из полученной точки на плане скоростей проводим луч перпендикулярный шатуну в рассматриваемом его положении и откладываем на нём отрезок AB.
) От полюса плана скоростей откладываем прямую до пересечения с отрезком
АB. Полученная точка и является искомой
точкой ![]() в рассматриваемом его положении.
Полученные данные изображают скорости VB,
VA, VBA, в масштабном коэффициенте.
в рассматриваемом его положении.
Полученные данные изображают скорости VB,
VA, VBA, в масштабном коэффициенте.
Так
же для построения плана скоростей необходимо найти скорости центров масс ![]() и
и ![]() .
Определения центров масс скоростей составляется по свойству подобия планов
скоростей. Составим пропорции:
.
Определения центров масс скоростей составляется по свойству подобия планов
скоростей. Составим пропорции:
 ;
;
 ;
;
Из
пропорций следует что:
 .
.
 .
.
На
плане скоростей, скорость центра масс кривошипа ![]() изображается
в виде прямой
изображается
в виде прямой ![]() и откладывается на отрезке прямой
и откладывается на отрезке прямой ![]() из полюса плана скоростей, скорость
из полюса плана скоростей, скорость ![]() изображается отрезком прямой
изображается отрезком прямой ![]() и откладывается на прямой отрезка
и откладывается на прямой отрезка ![]() , далее из полюса плана скоростей проводится прямая до
пересечения с найденной точкой. Скорости центров масс изображаются на чертеже в
масштабном коэффициенте.
, далее из полюса плана скоростей проводится прямая до
пересечения с найденной точкой. Скорости центров масс изображаются на чертеже в
масштабном коэффициенте.
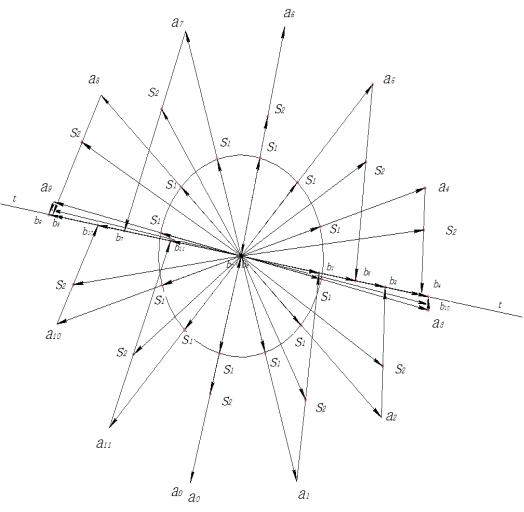
Рис.
4. План скоростей
Выполним модульный расчёт скоростей и частоты, рассмотрим в качестве примера первое положение
BA = a1b1∙μv =87,56
мм*0,05![]() =4,4 м/с;
=4,4 м/с;
VB = pvb1∙μv
=41,18 мм*0,05![]() =2,1м/с;
=2,1м/с;
VS1
= pvs1∙μv =42
мм*0,05![]() =2,1м/с;
=2,1м/с;
VS2
= pvs2∙μv =68,13
мм*0,05![]() =3,4м/с;
=3,4м/с;
 1/с.
1/с.
Проведём
аналогичные расчёты для остальных 11-ти положений:
Таблица 2.
|
Скорость № п/п |
VA |
VBA |
VB |
VS1 |
VS2 |
ω2 |
||||||
|
|
м/с |
1/c |
||||||||||
|
0 |
4,9 |
4,9 |
0 |
2,1 |
3,0 |
17,5 |
||||||
|
1 |
4,9 |
4,4 |
2,1 |
2,1 |
3,4 |
15,7 |
4,9 |
2,7 |
3,8 |
2,1 |
4,3 |
9,6 |
|
3 |
4,9 |
0,3 |
4,9 |
2,1 |
4,9 |
1,1 |
||||||
|
4 |
4,9 |
2,2 |
4,8 |
2,1 |
4,7 |
7.9 |
||||||
|
5 |
4,9 |
4,1 |
3,0 |
2,1 |
3,7 |
14,6 |
||||||
|
6 |
4,9 |
4,9 |
0 |
2,1 |
3,0 |
17,5 |
||||||
|
7 |
4,9 |
4,4 |
3,1 |
2,1 |
3,7 |
15,9 |
||||||
|
8 |
4,9 |
2,8 |
5,0 |
2,1 |
4,7 |
10,0 |
||||||
|
9 |
4,9 |
0,4 |
5,1 |
2,1 |
4,9 |
1,6 |
||||||
|
10 |
4,9 |
2,3 |
3,8 |
2,1 |
4,3 |
8,2 |
||||||
|
11 |
4,9 |
4,2 |
1,9 |
2,1 |
3,4 |
15,0 |
||||||
жесткий рычаг силовой кинематический
Расчёт ускорений методом планов будет проводится для двух положений механизма рабочего хода 4-5. В качестве примера будет рассмотрено 4-е положение механизма.
Для начала необходимо определить ускорение точки А, учитывая что кривошип
вращается с постоянной угловой скоростью, тогда воспользуемся формулой[1-2]:
аА = ω12lОА
=(70)2![]() *0,07м=343 м/с2.
*0,07м=343 м/с2.
Далее
составим векторное уравнение и решим его графически
![]() , (1.4.1)
, (1.4.1)
Для того что бы решить это уравнение графически, необходимо определится с направлением ускорений и масштабным коэффициентом, необходимо заметить что для каждого плана масштабный коэффициент высчитывается свой, с таким же условием, что бы он был целым числом или простой десятичной дробью.
Переносное
ускорение точки В (аА) направлено параллельно кривошипу в
рассматриваемом положении. Нормальное ускорение ![]() параллельно
шатуну, из точки В в точку А, а тангенциальное ускорение
параллельно
шатуну, из точки В в точку А, а тангенциальное ускорение ![]() направленно перпендикулярно АВ. Ускорение
направленно перпендикулярно АВ. Ускорение ![]() направлено параллельно направляющей
направлено параллельно направляющей ![]() ползуна. Определим масштабный коэффициент:
ползуна. Определим масштабный коэффициент:
 .
.
Отрезок
![]() будет одинаковым для всех положений
будет одинаковым для всех положений
Нормальное
ускорение рассчитывается по формуле:
аnВА
= ω22![]() =(8)2*0,28=17,7/с2
=(8)2*0,28=17,7/с2
При построении плана ускорений необходимо:
)
На свободном поле чертежа поставить полюс плана ускорений ![]()
)
Из полюса плана ускорений откладываем отрезок ![]() ,параллельно
отрезку ОА4.
,параллельно
отрезку ОА4.
)
Далее необходимо найти отрезок n4a4 . Для
этого воспользуемся формулой:
n4a4=  .
.
) Откладываем отрезок n4a4 параллельно А4В4 из точки a4
5)
Из точки n4 проводим
перпендикуляр до пересечения с прямой t-t ,данный
отрезок является тангенциальной составляющей ускорения
6) Из полюса pa проводим прямую параллельно направляющей t-t до
пересечения с перпендикуляром отрезка тангенциальной составляющей ,найденный
отрезок является точкой b4.
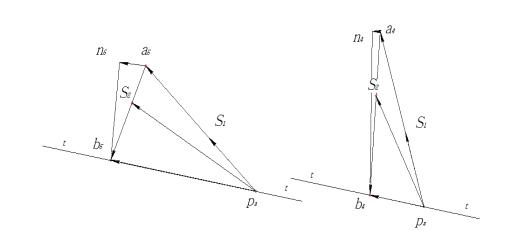
Рис.
5. План ускорений