Материал: Проектирование и исследование кривошипно-ползунного механизма рабочей машины
Так
же необходимо определить положения центров масс ускорений, для этого составим
пропорции:
 ;
;
 ;
;
Отсюда следует что:
 мм;
мм;
 мм;
мм;
Полученные
отрезки откладываем на плане ускорений. 1)Ускорение центра масс откладываем из
полюса ![]() получим точку S1.2) Ускорение S2 откладывается на отрезке
получим точку S1.2) Ускорение S2 откладывается на отрезке ![]() .
.
Далее
приведём расчёты оставшихся ускорений:
аτBA = n4b4∙μa = 76,78*4= 307,1 м/с2;
aBA = a4b4∙μa = 76,91*4= 307,6м/с2;
aB = pаb4∙μa = 31,17*4= 124,7м/с2;
aS1 = pas1∙μa = 36,75 *4= 147 м/с2.S2 = pas2∙μa = 58,61*4= 234,4 м/с2
 1/с2
1/с2
Таблица 3
|
Ускорение № п/п |
aA |
anBA |
aτBA |
aBA |
аS1 |
aS2 |
aB |
ε2 |
|
|
м/с2 |
1/с2 |
||||||
|
4 |
343 |
17,7 |
307,1 |
307,6 |
147 |
234,4 |
124,7 |
1097 |
|
5 |
343 |
60,3 |
184,2 |
193,8 |
147 |
326,3 |
334,7 |
658 |
2. Силовой расчет механизма
В ходе силового расчёта механизма, так же будут рассмотренны 4-е и 5-е положения механизма: их схемы нагружения, действующие на них силы, уравновешивающий моменты и реакции. Так же необходимо отметить что силовой расчёт выполняется именно для тех положений, которые были рассмотрены в плане ускорений. Непосредственно сам расчёт выполняется 2-мя методами 1) Методом планов и 2) Методом рычага Жуковского
Выполним силовой расчёт методом планов, для этого необходимо построить диаграмму сил полезного действия. Для построения диаграммы сил полезного действия необходимо:
) Определить масштабный коэффициент.
![]()
Где ![]() длина определяемая произвольно (в диапазоне от 40 до 60) мм.
длина определяемая произвольно (в диапазоне от 40 до 60) мм.
)Диаграмма строится над(под) направляющей t-t таким образом что бы ось абсцисс располагалась параллельно направляющей.
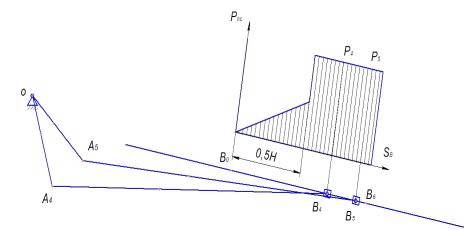
Рис. 6. Диаграмма усилий на ползуне
Н=100,26мм => 0,5Н=50,13мм.
) На диаграмме понятно, что для того что бы определить силы полезного сопротивления необходимо от точек рассматриваемых положений, перпендикулярно направляющей t-t провести прямые, длины которых мы ранее определили (РПС=РПС4=РПС5)
Далее необходимо построить схему нагружения структурной группы.
2.1 Силовой расчет
структурной группы методом планов
Для начала определим величины, необходимые в дальнейших расчётах.
Сила притяжения направление на схеме всегда вертикально вниз
2 = m2g =0,63кг*9,8(м/с2)=6,17Н;
G3 = m3g =0,25 кг*9,8(м/с2)=2,45Н,
где g - ускорение свободного падения.
Для того что бы определить силы инерции звеньев
необходимо воспользоваться методом замещения точечных масс, для этого шатун
заменим двумя точечными массами mA2,
mB2 расположенные в центре шарниров А и
В, Точечные массы mA2, mB2 находятся по формулам:
![]() ;
;
![]() .
.
Определим силы инерции замещающих масс по формулам:
РиА2 = mА2aА =0,38кг*343м/с2=131,81 Н;
РиВ2 = mВ2aВ =0,25 кг* 124,7м/с2= 30,86Н;
Сила инерции ползуна:
Ри3 = m3aB = 0,25 кг* 124,7м/с2=
31,17 Н,
Далее
составим схему нагружения. Для определения сил действующих в кинематических
парах структурной группы, необходимо обозначить все силы и реакции связей
действующие на механизм, а именно: силы тяжести G2 и G3;
силы инерции ![]() ,
, ![]() , и
, и ![]() ; силу полезного сопротивления РПС и
реакции связей реакции связей R12, R03. (R03-сила
с которой стойка действует на шатун).
; силу полезного сопротивления РПС и
реакции связей реакции связей R12, R03. (R03-сила
с которой стойка действует на шатун).
На
схеме нагружения силы изображаются отрезками произвольной длины, но строго
выдерживается их направление.
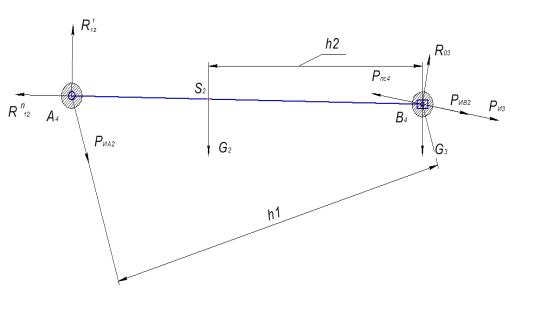
Рис. 7. План сил
На
схеме направление сил тяжести G2 и G3 всегда
перпендикулярно вниз, точками приложения являются, центр масс S2 и точка B (в рассматриваемом положении
точка B4). Линия
действия реакции R03 направлена перпендикулярно направляющей t-t
ползуна. Направление и величина реакции R12 на данном этапе расчёта
не известна. Реакцию R12 раскладываем на составляющие: нормальную ![]() и тангенциальную
и тангенциальную ![]() :
:
→ → →
R12 = Rn12 + Rτ12.
Составляющая
![]() направлена вдоль шатуна, а
направлена вдоль шатуна, а ![]() - перпендикулярно АВ.
- перпендикулярно АВ.
Силы инерции определяются методом замещающих точечных масс. В соответствии с которым масса шатуна разносится в центре шарниров А и В. Сила инерции РИА2 приложена в точке А шатуна и направлена противоположно ускорению аА точки А, силы РИВ2 и РИ3 направлены противоположно ускорению аВ точки В шатуна. Сила РИВ2 приложена в точке В шатуна, а РИ3 - в точке В ползуна.
Под
действием указанных сил и реакций, рассматриваемая структурная группа находится
в равновесии. Из условия равновесия системы сил действующих на шатун следует,
что сумма моментов сил действующих на шатун относительно точки В равна нулю.
Отсюда следует что ![]()
Из
условия равновесия системы сил действующих на шатун определим рекцию ![]() :
:
![]() ;
;
Отсюда
следует что:
 ,
,
где
![]() и
и ![]() - плечи
сил
- плечи
сил ![]() и
и ![]() ,
измеряются в мм на схеме нагружения.
,
измеряются в мм на схеме нагружения.

![]() (2.1)
(2.1)
Запишем векторное уравнение(2.1) условия равновесия сил и решим его графически:
Для этого необходимо:
1) Выбрать масштабный коэффициент:
![]()
где
![]() - длина отрезка, которым сила полезного сопротивления
изображается на плане сил.
- длина отрезка, которым сила полезного сопротивления
изображается на плане сил.
) Длины отрезков необходимых для изображения в масштабном коэффициенте, находятся путём деления на масштабный коэффициент. Длины отрезков входящие в диапазон от 0 до 2мм изображаться не будут.
)
Последовательно изобразим реакции: 1)![]() , 2) РИА2,
3) РИВ2 параллельно t-t, 4) РИ3 параллельно t-t, 5)
РПС4 параллельно t-t. Далее необходимо с конца отрезка силы полезного
сопротивления отложить перпендикуляр и от начала отрезка тангенциальной
реакции, так же отложить перпендикуляр, пересечением этих 2-х перпендикуляров и
будет точка приложения реакции R03. От
точки R03
проведём 2-е прямые до пересечения с началом и концом отрезка
, 2) РИА2,
3) РИВ2 параллельно t-t, 4) РИ3 параллельно t-t, 5)
РПС4 параллельно t-t. Далее необходимо с конца отрезка силы полезного
сопротивления отложить перпендикуляр и от начала отрезка тангенциальной
реакции, так же отложить перпендикуляр, пересечением этих 2-х перпендикуляров и
будет точка приложения реакции R03. От
точки R03
проведём 2-е прямые до пересечения с началом и концом отрезка![]() , Полученные прямые являются реакциями
, Полученные прямые являются реакциями ![]() и
и ![]()
Точку
приложения реакции ![]() определяем по условию равновесия системы сил,
действующих на ползун. Линии действия сил РПС4, G2, РИА2,
РИ3 проходят через геометрическую ось шарнира В
определяем по условию равновесия системы сил,
действующих на ползун. Линии действия сил РПС4, G2, РИА2,
РИ3 проходят через геометрическую ось шарнира В
В
связи с этим:
![]()
Реакция
![]() не равна нулю, следовательно, размер
не равна нулю, следовательно, размер![]() . Таким образом, при центральном расположении шарнира
В на ползуне линия действия реакции
. Таким образом, при центральном расположении шарнира
В на ползуне линия действия реакции ![]() проходит
через его геометрический центр.
проходит
через его геометрический центр.
Расчет
модулей искомых реакций:
![]()
![]()
![]()
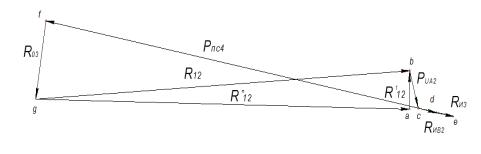
Рис. 8. План сил для положения 4.
Исходя из данных рисунка можно узнать направление не
известных ранее реакций.
2.2 Силовой расчет кривошипа
методом планов
Расчёт
кривошипа методом планов, очевидно схож с пред идущим расчётом в данном
курсовом проекте. Отличие заключается в том что помимо действующих сил: тяжести
![]() ; инерции
; инерции ![]() ; реакции
; реакции
![]() и
и ![]() , система
сил уравновешивается сил парой сил с моментом
, система
сил уравновешивается сил парой сил с моментом ![]() .
.
Определим силу тяжести кривошипа:
![]()
![]()
Так же как и для расчёта сил инерции шатуна, заменим кривошип двумя
точечными массами mА1 и mО1, расположенными в центрах
шарниров А и О соответственно.
![]()
![]()
![]()
![]()
Силы инерции замещающих масс [1-3]:
![]()
![]()
Так как стойка неподвижна, следовательно:
![]()
Реакция
![]() , действующая со стороны шатуна на кривошип, на данном
этапе расчета известна. Она связана с реакцией
, действующая со стороны шатуна на кривошип, на данном
этапе расчета известна. Она связана с реакцией ![]() ,
величина и направление которой определены при силовом расчете структурной
группы, следующим соотношением:
,
величина и направление которой определены при силовом расчете структурной
группы, следующим соотношением:
Под действием указанной на схеме нагружения системы сил кривошип находится в равновесии, следовательно:
![]()
![]()
![]()
Реакция
![]() определяется в ходе решения векторного уравнения
определяется в ходе решения векторного уравнения
![]()
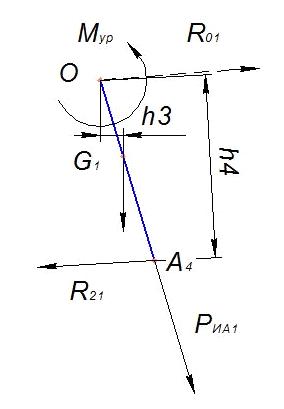
Рис. 9. Схема нагружения кривошипа
План сил, действующих на кривошип, приведен на рис. 10. На плане сил не
отображена сила тяжести ![]() т.к. значение силы не большое, силой можно пренебречь.
т.к. значение силы не большое, силой можно пренебречь.
Масштабный коэффициент плана сил:
![]()
![]()
Величина
реакции ![]() :
:
![]()
![]()
Результаты
силового расчета методом планов для рассматриваемых положений механизма
приведены в таблице 3.
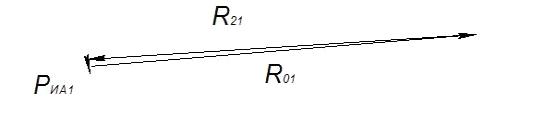
Рис. 10. План сил, действующих на кривошип
Таблица 4.
|
Сила №п/п |
РиА1 |
РиА2 |
РиВ2 |
Ри3 |
|
|
|
|
|
|
|
|
|
Н |
Нм |
|||||||||
|
4 |
30,87 |
131,81 |
30,86 |
31,17 |
1764,60 |
129,18 |
1769,40 |
281,70 |
1667,40 |
1850 |
120,33 |
|
5 |
|
|
82,84 |
83,68 |
1687,05 |
83,26 |
1689,15 |
125,25 |
1665,60 |
|
75,93 |
2.3 Определение
уравновешивающей силы методом «жесткого рычага» Н.Е. Жуковского
Рычаг
Н.Е. Жуковского - повернутый на 90о план скоростей, нагруженный
внешними силами, действующими на звенья механизма, включая силы инерции и
уравновешивающие силы ![]() .
.
Для
построения схемы нагружения рычага Н.Е. Жуковского в рассматриваемом положении
механизма изображаем повернутый на 90о план скоростей (направление
его поворота на результат расчета не влияет). В соответствующие точки плана со
схем нагружения структурной группы (Рис. 7) и кривошипа (Рис. 9) параллельно
самим себе переносятся силы тяжести, инерции, полезного сопротивления и
прикладываются уравновешивающие силы (![]() ).
).