Материал: Проектирование детектора природного газа
2.2 Разработка основных функциональных узлов
Так как в микроконтроллере мы используем модуль USB, то для стабильной работы модуля необходим конденсатор С3 номиналом 470 пФ. Резистор R1 номиналом 1 кОм обеспечивает включение микроконтроллера.
Узел микроконтроллера изображен на рисунке 4.
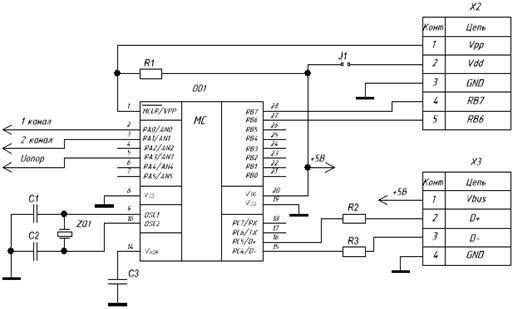
Рисунок 4 - Схема узла микроконтроллера
Питание микроконтроллера осуществляется от стабилизированного источника питания с напряжением 5 В. Плюс подводится к выводу 20 (VDD), а минус к выводам 8, 19 (VSS). Это же напряжения будет задано в качестве опорного напряжения UОПОР для встроенного аналого-цифрового преобразователя.
К микроконтроллеру подключены: разъем X2 для внутрисхемного программирования и разъем X3, который будет подключаться к USB порту компьютера, для передачи данных.
Уровень сигнала с выхода датчиков нагрузки и перемещения очень мал и составляет единицы милливольт. Для того чтобы измерения производились с требуемой точностью, необходимо чтобы на входе АЦП сигнал достигал уровня до 5 вольт. Для этого необходимо воспользоваться масштабирующим усилителем. Данный узел построен на основе 2 операционных усилителей (ОУ), который обеспечивает согласование сигнала, поступающего от датчиков к АЦП.
Требования, предъявляемые к ОУ: низкое напряжение смещения (десятки мкВ); малый температурный коэффициент напряжения смещения нуля; высокое входное сопротивление (десятки МОм).
После проведенных сравнений операционных усилителей, были выбраны ОУ OPA177 и OP07, которые являются прецизионными. Их основные параметры
приводятся в таблицах 2.1 и 2.2.
Таблица 2.1
Основные параметры ОУ OPA177
|
Параметр |
Значение |
|
Напряжение питания Uпит, В |
±15 |
|
Потребляемый ток Iпот, мА |
1,5 |
|
Напряжение смещения Uсм , мкВ |
25 |
|
Температурный коэффициент напряжения смещения нуля TKUсм, мкВ/°С |
0,3 |
|
Коэффициент ослабления синфазного сигнала Ku, дБ |
140 |
|
Входное сопротивление Rвх, МОм |
45 |
|
Наибольшая амплитуда выходного сигнала Uвыхmax, В |
12,5 |
Таблица 2.2
Основные параметры ОУ OP07
|
Параметр |
Значение |
|
Напряжение питания Uпит, В |
±15 |
|
Потребляемый ток Iпот, мА |
1,5 |
|
Напряжение смещения Uсм , мкВ |
30 |
|
Температурный коэффициент напряжения смещения нуля TKUсм, мкВ/°С |
0,3 |
|
Коэффициент ослабления синфазного сигнала Ku, дБ |
123 |
|
Входное сопротивление Rвх, МОм |
50 |
|
Наибольшая амплитуда выходного сигнала Uвыхmax, В |
12 |
Расположение и назначение выводов операционных усилителей одинаковое и
изображено на рисунке 5.
Рисунок 5 - Расположение выводов ОУ
Зададимся следующими параметрами:
- Коэффициент передачи первого каскада К1 =50;
- Коэффициент передачи второго каскада К2 =9.
Тензодатчики имеют сопротивление 200 Ом, соответственно у резисторов R1 и R2 номинал 200 Ом. Цепь из резисторов R3 и R4 обеспечивает настройку нуля на выходе усилителя при отсутствии воздействия. Резисторы R5, R6 и R7 необходимы для регулирования напряжения смещения нуля. Номиналы резисторов R5 и R7 равны 5 кОм, резистор R6 подстроечный номиналом 10 кОм, в сумме дающие сопротивление 20 кОм.
Номиналы резисторов R8 - R11 необходимо рассчитать исходя из коэффициентов передачи.
Коэффициент передачи первого каскада определяется выражением:
![]()
Отсюда
определим сопротивление резистора R8:
![]()
![]() Ом
Ом
Узел стабилизации напряжения обеспечивает стабильное питание микроконтроллера, операционных усилителей и тензодатчиков. Микроконтроллер питается напряжением 5В, которое необходимо подавать на Vdd вывод 20. Операционные усилители питаются от двуполярного напряжения. Плюс 15В подаются на 7-е выводы ОУ, минус 15В подаются на 4-е выводы ОУ.
У стабилизаторов L7805 и L7815 входом является 1 ножка, выходом 3 ножка, а вывод 2 - общий. У стабилизатора L7915 входом является 2 ножка, выходом 3 ножка, а вывод 1 - общий.
Микросхемы включены по типовой схеме включения представленной на рисунке
6.
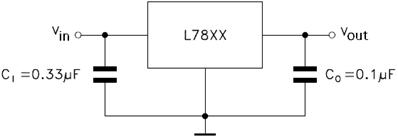
Рисунок 6 - Схема включения стабилизатора напряжения
2.3 Обоснование выбора типа микропроцессорной системы
МПС возможно реализовать следующими путями:
- на основе самостоятельного высокопроизводительного микропроцессора (МП), управляющего внешней оперативной памятью и периферийным интерфейсом USB;
- на основе микроконтроллера (МК), в который указанные блоки интегрированы, а также может быть интегрирован и АЦП. Таковые МК производятся [сослаться на .pdf в списке литературы].
Стоимость МП на сегодняшний день на порядок выше МК с указанным выше
набором устройств. Кроме того, остаются память (стоимость того же порядка) и
интерфейс USB. Поэтому в МПС разрабатываемой
системы целесообразнее применение МК (рисунок 7).

Рисунок 7 - Структурная схема разрабатываемого устройства
Д1, Д2 - тензо-датчики усилия и деформации; МУ1, МУ2 - масштабирующие усилители; М - мультиплексор; АЦП - аналого-цифровой преобразователь; МК - микроконтроллер.
Предварительно для АЦП необходимо определить:
. Разрядность.
2. Тип связи с МПС (последовательный или параллелный).
Для
обеспечения требуемой в ТЗ малости погрешности измерений ![]() , суммарная погрешность преобразования АЦП
, суммарная погрешность преобразования АЦП ![]() должна быть в три раза меньше
должна быть в три раза меньше ![]() . В среднем максимальные погрешности АЦП -
дифференциальная нелинейность
. В среднем максимальные погрешности АЦП -
дифференциальная нелинейность ![]() ,
интегральная нелинейность
,
интегральная нелинейность ![]() и погрешность полной шкалы
и погрешность полной шкалы ![]() - составляют порядка одной единицы младшего значащего
разряда (МЗР). Таким образом, суммарная относительная погрешность
преобразования АЦП с разрядностью N определиться выражением:
- составляют порядка одной единицы младшего значащего
разряда (МЗР). Таким образом, суммарная относительная погрешность
преобразования АЦП с разрядностью N определиться выражением:
![]() . (1)
. (1)
Так
при N = 10 - ![]() ,
,
при
N = 12 - ![]() .
.
Таким образом, двенадцатиразрядный АЦП предпочтительней.
Что
касается АЦП с последовательным интерфейсом связи с МПС - на сегодняшний день
производятся таковые с полным временем преобразования и передачи ![]() . Поэтому вариант АЦП с последовательным интерфейсом
нас может устроить.
. Поэтому вариант АЦП с последовательным интерфейсом
нас может устроить.
Анализируя технические характеристики производимых на сегодняшний день МК, выбор осуществляли по следующим критериям:
. Наличие внутреннего аппаратного интерфейса USB.
2. Производительность МК должна обеспечивать необходимую скорость
измерения и сохранения в ОЗУ измеренных отсчётов:
![]() ,
,
где
![]() - длительность полного программного цикла измерения и
сохранения в ОЗУ.
- длительность полного программного цикла измерения и
сохранения в ОЗУ.
.
Количество линий ввода-вывода ![]() . По
предварительному приближению нам требуются следующие линии:
. По
предварительному приближению нам требуются следующие линии:
- две линии данных USB;
- две линии синхронизации (к кварцу);
- четыре линии сопряжения с АЦП - линия последовательных данных, «Пуск», «готовность АЦП» и «синхронизация».
- линия управления мультиплексором М. Итого - 9 линий.
3.
Реализация основных узлов
3.1
Узел управления и обработки
Основным узлом отладчика является блок управления и обработки. Основными задачами данного узла являются:
¾ обмен данными между ПК и отладчиком;
¾ преобразование команд IDE AVR Studio в команды JTAG;
¾ обмен данными между отладчиком и отлаживаемым устройством.
Для решения данных задач необходимо использовать микроконтроллер (МК) который имеет в своем составе минимальный набор периферийных устройств, но в то же время достаточных для выполнения выше указанных операций.
Одним из главных критериев в выборе марки МК является наличие в нём универсального асинхронного приемопередатчика UART, благодаря которому возможна организация обмена данных между ПК и отладчиком по интерфейсу RS232, и последовательного периферийного интерфейса SPI, позволяющего организовать обмен данных между отладчиком и отлаживаемым устройством. Преобразование команд IDE AVR Studio в команды JTAG осуществляется программно. Код программы распространяется бесплатно и записывается через интерфейс SPI во внутреннюю память программ МК. Исходя из выше изложенного, наиболее подходящим для проекта является МК марки ATmega16 /2/. Данный МК является наиболее простым в своём семействе и имеет в своем составе нужные нам интерфейсы (SPI,UART).
На рисунке 3.1 представлены корпуса МК этого семейства. Как видно из рисунка, фирма Atmel производит корпуса в двух исполнениях: форматы PDIP (40 ножек) и TQFP(44 ножки). Корпус TQFP обладает меньшими габаритами, но контактные ножки могут располагаться только на одной из сторон печатной платы. Для проекта нам подойдет корпус PDIP,так как контактные ножки крепятся одновременно на двух сторонах печатной платы, что очень удобно при монтаже.
Микроконтроллер производится по технологии высокоплотной энергонезависимой
памяти компании Atmel. Встроенная внутрисистемно программируемая флэш-память
позволяет перепрограммировать память программ непосредственно внутри системы
через последовательный интерфейс SPI с помощью простого программатора или с
помощью автономной программы в загрузочном секторе. Загрузочная программа может
использовать любой интерфейс для загрузки прикладной программы во флэш-память.
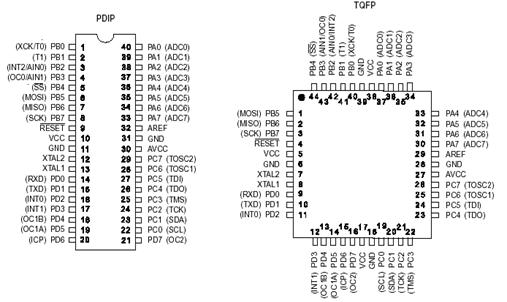
Рисунок 3.1- Виды корпусов и расположение выводов ATmega16
Программа в загрузочном секторе продолжает работу в процессе обновления прикладной секции флэш-памяти, тем самым поддерживая двухоперационность: чтение во время записи. За счет сочетания 8-разр. RISC ЦПУ с внутрисистемно самопрограммируемой флэш-памятью в одной микросхеме ATmega16 является мощным микроконтроллером, позволяющим достичь высокой степени гибкости и эффективной стоимости при проектировании большинства приложений встроенного управления.поддерживается полным набором программных и аппаратных средств для проектирования, в т.ч.: Си-компиляторы, макроассемблеры, программные отладчики/симуляторы, внутрисистемные эмуляторы и оценочные наборы.
Рассмотрим подробнее МК ATmega16.
На рисунке 3.2 представлена структурная схема МК ATmega16. На схеме видно, что микросхема имеет 4 порта общего назначения, микропроцессорную часть, память программ и данных, а также обширный набор периферийных устройств.
Ниже приведены основные характеристики данного МК:
¾ 8-разрядный высокопроизводительный AVR микроконтроллер с малым потреблением;
¾ прогрессивная RISC архитектура;
¾ 130 высокопроизводительных команд, большинство команд выполняется за один тактовый цикл;
¾ 32 8-разрядных рабочих регистра общего назначения;
¾ полностью статическая работа;
¾ 8-канальный 10-разрядный аналого-цифровой преобразователь;
¾ 8 несимметричных каналов;
¾ 7 дифференциальных каналов (только в корпусе TQFP);
¾ 2 дифференциальных канала с программируемым усилением в 1, 10 или 200 крат (только в корпусе TQFP);
¾ байт-ориентированный 2-проводный последовательный интерфейс;
¾ программируемый последовательный USART;
¾ специальные микроконтроллерные функции;
¾ сброс по подаче питания и программируемый детектор кратковременного снижения напряжения питания;
¾ встроенный калиброванный RC-генератор;
¾ внутренние и внешние источники прерываний;
¾ шесть режимов пониженного потребления: Idle, Power-save, Power-down, Standby, Extended Standby и снижения шумов ADC;
¾ выводы I/O и корпуса;
¾ 32 программируемые линии ввода/вывода;
¾ 40-выводной корпус PDIP и 44-выводной корпус TQFP;
¾ рабочее напряжение 4,5 - 5,5 В;
¾ рабочая частота 0 - 8 МГц .
3.1.1 Расчёт частоты синхроимпульсов МК
Для работы МК необходимо рассчитать тактовую частоту, с которой он будет нормально функционировать. МК может тактироваться как встроенным RC-генератора, так и внешним. Остановимся на последнем, так как внешние кварцевые резонаторы обладают высокой временной точностью.
Изучив документацию фирменного внутрисхемного отладчика AVR JTAGICE /3/, было найдено, что устройство согласовано с
персональным компьютером по скорости обмена данных - 115200 бит/сек. В
документации МК ATmega16 указана
расчётная формула для выбора внешней частоты синхронизации. Вычислим частоту
кварцевого генератора:
![]() ; (1)
; (1)
![]() Гц,
Гц,
где BAUD - скорость обмена данными по UART;
UBRR - регистр скорости передачи UART
Значение UBRR берётся из таблицы 3.1. Интерфейс UART имеет 2 типа скорости обмена в асинхронном режиме - это нормальный режим и режим двойной скорости (за это отвечает бит U2X регистра UCSRA). Множитель «16» в формуле (1) берётся исходя из того, что был выбран нормальный режим работы UART.
Рисунок 3.2- Структурная схема МК ATmega16
Как видно из таблицы 3.1, при скорости обмена данных 115200 бит/сек можно выбрать 3 типа частоты кварцевого генератора- 3.6864 МГц, 4 МГц и 7.3728 МГц. Выбор производился по следующим критериям -то максимальное быстродействие и минимальная погрешность работы МК. Наиболее всего подходит частота 7.3728 МГц, так как с этой частотой МК будет работать с нулевой ошибкой и с максимальным быстродействием.
На рисунке 3.3 показана схема включения кварца. Конденсаторы С1 и С2
увеличивают стабильность работы кварцевого генератора, но при этом несколько
увеличивают время его запуска. Номиналы емкостей конденсаторов в схеме
определяются производителем микроконтроллера для конкретной резонансной частоты
кварца. Для данной схемы они равны C1=С2=12÷22 пФ.