Материал: patrakeev_im_geoprostranstvennye_tekhnologii_v_modelirovanii
Для изменения состояния единичного z-автомата ОС-модели из одного состояния в другое необходимо инициировать процесс развития, скорость которого будет определяться первичными и вторичными локальными функциями перехода, которые и определяют непрерывность процесса развития градостроительной системы.
Необходимо отметить, что факторы ускорения и замедления развития градостроительной системы могут также быть формализованы в терминах нечетких переменных. То есть факторы, ускоряющие или замедляющие процесс развития градостроительной системы, могут быть «сильными», «умеренными», «слабыми» в своем воздействии на процесс урбанизации и на процесс развития градостроительной системы в целом.
Например, учет топографических особенностей территории позволяет реализовать в ОС-модели влияние факторов, которые либо полностью замедляют процесс развития градостроительной системы либо оказывают сдерживающее влияние на рассматриваемый процесс.
Управляемость территориально-пространственной системы может быть обеспечена при условии учета степени влияния любого ускоряющего или сдерживающего фактора на скорость пространственно-временного развития градостроительной системы.
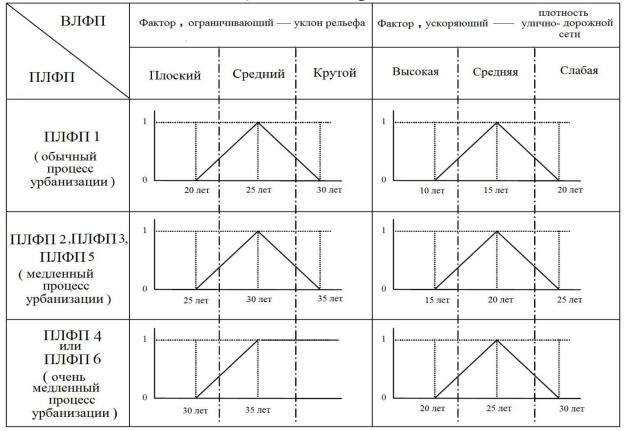
Например, интервал времени развития градостроительной системы от 15 до 25 лет можно отнести к «средней» скорости. Максимальное значение функциb принадлежности для «средней» скорости развития градостроительной системы достигнет в момент времени около 20-ти лет. В случае наличия ускоряющих факторов для z-автоматов-соседей, входящих в шаблон соседства (ШС) X, максимальное значение функции принадлежности для «средней» скорости развития градостроительной системы скорость развития градостроительной системы может достигнуть на интервале времени от 10 до 20 лет.
Необходимо отметить, что если воздействуют несколько ускоряющих факторов, то скорость развития градостроительной системы стремится быть ближе к 10 годам, что соответствует нечеткому множеству «быстро».
В таблице 4.3 представлены первичные и вторичные локальные функции переходов, которые определяют порядок и скорость изменения развития градостроительной системы. Вторичные локальные функции перехода характеризуют ограничивающий фактор – уклон рельефа и ускоряющий фактор – плотность улично-дорожной сети.
161
В итоге можно сказать, что разрабатываемая система прогнозирования пространственно-временного развития градостроительной системы «погружена» в нечеткую среду, находящуюся под воздействием внешних факторов. Основываясь на правилах вывода с нечеткой логикой, можно значительно расширить количество факторов в модели, влияющих на скорость пространственно-временного развития градостроительной системы, в зависимости от понимания градостроительной системы, доступности исходных данных, которые характеризуют факторы, касающиеся градостроительной системы. Эти факторы могут быть или физическими, социально-экономическими, организационными или сочетанием вышеуказанных факторов.
Таблица 4.3
4.3.4 Процесс дефаззификации
Дефаззификация используется тогда, когда необходимо преобразовать нечеткий набор значений выводимых лингвистических переменных к точным значениям. Имеется достаточно большое количество методов перехода к точным значениям (по крайней мере, 30). Наиболее общие методы — « методы полной интерпретации» и «по максимуму». В методе
162
полной интерпретации точное значение выводимой переменной вычисляется как значение «центра тяжести» функции принадлежности для нечеткого значения. В методе «максимума» в качестве точного значения выводимой переменной принимается максимальное значение функции принадлежности.
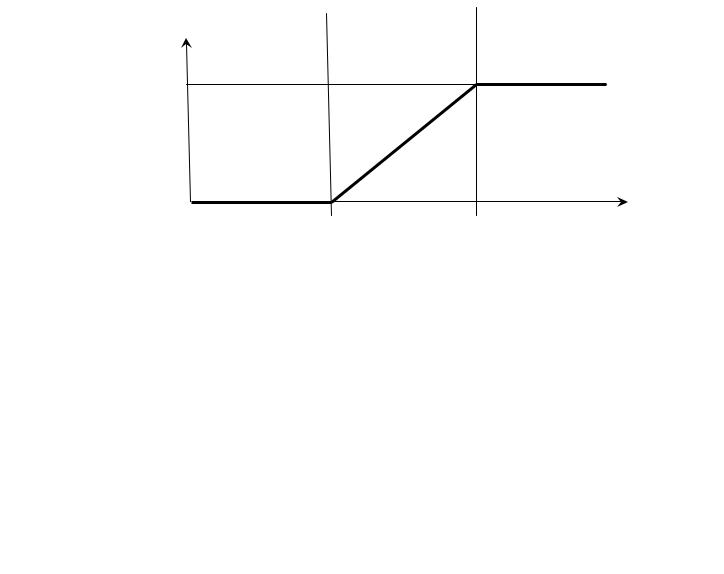
Для дефаззификации применяется простая линейная функция принадлежности, как показано на рис. 4.15. В соответствии с этой функцией принадлежности состояние каждого единичного z-автомата может быть представлено в трех состояниях: не урбанизированное, частично урбанизированное и урбанизированное состояние территории. Единичные z-автоматы ОС-модели, для которых значение функции принадлежности – 0 соответствуют состоянию не урбанизированной территории, единичные z-автоматы, для которых значение функции принадлежности – 1 соответствуют состоянию урбанизированной территории, и все другие z-автоматы, для которых значение функции принадлежности принимает значение от 0 до 1 – полностью относятся к частично урбанизированной территории.
средняя степень µ антропогенного
освоения
территории
1
низкая степень |
высокая степень |
|
антропогенного |
||
антропогенного |
||
освоения |
||
освоения |
||
территории |
||
территории |
||
|
0
xij
ρ1 ρ2
Рис. 4.15 – Функция принадлежности дефазификации нечетких выходных результатов
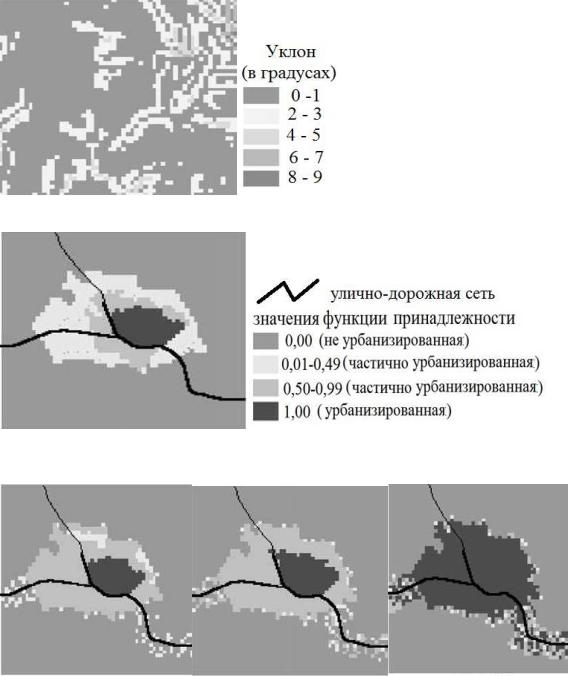
На рис. 4.16 представлены результаты моделирования развития градостроительной системы не с учетом как ограничивающего фактора топографических особенностей рельефа местности, так и ускоряющего фактора, которым является плотность улично-дорожной сети. В результате моделирования показано, что наиболее быстро подвергаются урбанизации территории, находящиеся вдоль основних транспортных магистралей.
163
а)
б) t = 0
в) t = 5 |
г) t = 10 |
д) t = 25 |
Рис. 4.16 – Влияние ограничивающих и благоприятных факторов на динамику развития градостроительной системы: а) уклон рельефа;
б) начальное состояние градостроительной системы; в) сценарий развития на 5 лет; г) сценарий развития на 10 лет; д) перспективы развития градостроительной системы на 25 лет
164
Выводы
В главе разработана концепция модели пространственно-временного развития градостроительной системы на основе принципов нечетких однородных структур и нечеткой логики. Одной из таких функций модели является определение состояний единичного z-автомата. На основе теории нечетких множеств состояние единичного z-автомата связано со степенью принадлежности различных состояний единичного z-автомата в процессе городского развития. Применение теории нечетких множеств позволяет представить развитие градостроительной системы как непрерывный процесс в пространстве и времени, а не в виде бинарного перехода между не урбанизированной и урбанизированной территориями.
Кроме того, используя продукционную модель представления знаний, сформулированы локальные функции перехода для регулирования скорости изменения состояния единичных z-автоматов из одного состояния в другое, используя такие лингвистические переменные: как «быстро», «очень быстро», «средний», «медленно», «очень медленно» и так далее.
Факторы, влияющие на скорость пространственно-временного развития градостроительной системы, могут быть применены в модели как ограничивающие или ускоряющие процесс. Эти факторы могут отображать физические особенности окружающей среды, архитектурнопланировочные особенности, социально-экономические условия, а также многие другие. Такие факторы применяют в модели пространственновременного развития градостроительных систем как вторичные логические правила. Применение нечеткой логики в формировании локальных функций перехода для правил предполагает совершенно иной уровень моделирования, благодаря которому творческий процесс моделирования происходит на наивысшем уровне абстракции, при котором постулируется лишь минимальный набор закономерностей.
165