Page 1602 DICOM PS3.3 2020a - Information Object Definitions
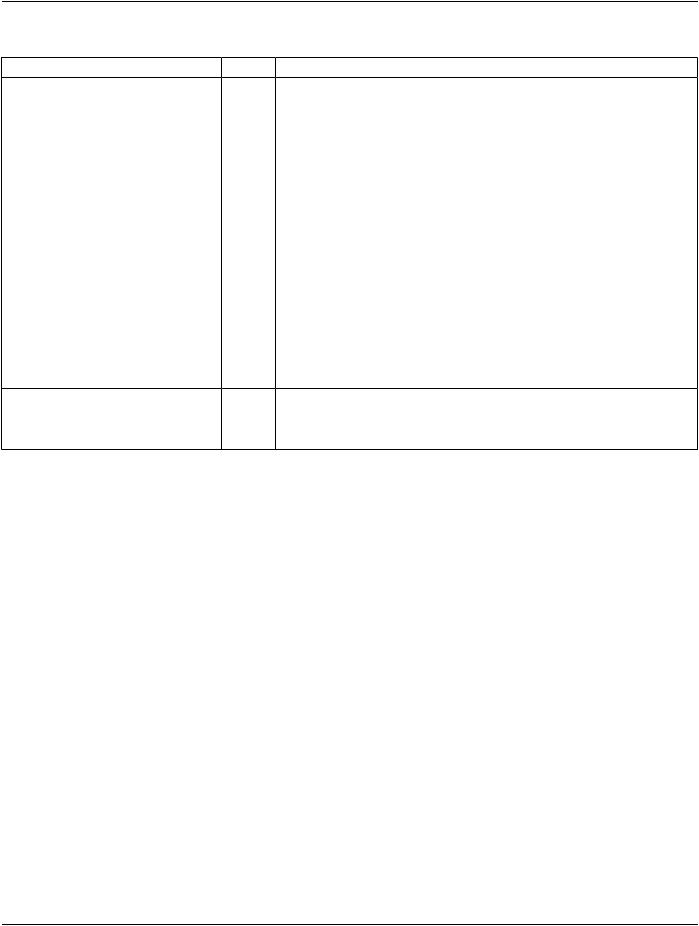
Table C.36.2.2.5-1. RT Control Point General Macro Attributes
Attribute Name |
Tag |
Type |
Attribute Description |
RT Control Point Index (300A,0600) |
1 |
The index of the RT Control Point within the Sequence where this Macro is |
|
|
|
included. |
|
|
|
RT Control Points shall be executed in the order of the RT Control Point Index. |
|
|
|
The value shall start at 1 and increase monotonically by 1 within the Sequence |
|
|
|
where this Macro is included. |
Cumulative Meterset |
(300A,063C) |
1C |
Meterset at the RT Control Point. |
|
|
|
The units are specified by Radiation Dosimeter Unit Sequence (300A,0658). |
|
|
|
For the Item with RT Control Point Index equal 1, the Cumulative Meterset shall |
|
|
|
be equal to 0.0. |
|
|
|
RequiredifRTRadiationPhysicalandGeometricContentDetailFlag(300A,0638) |
|
|
|
equals FULL or IDENT_ONLY or RT Record Flag (300A,0639) equals YES and |
|
|
|
if the conditions in Section C.36.2.2.5.1.1 are satisfied. |
|
|
|
May be present otherwise only if the conditions in Section C.36.2.2.5.1.1 are |
|
|
|
satisfied. |
|
|
|
See Section C.36.2.2.5.1.3. |
Referenced Treatment |
(300A,060B) |
1C |
The valueofTreatmentPositionIndex(300A,0606)from theTreatmentPosition |
Position Index |
|
|
Sequence (300A,063F) within this IOD that this RT Control Point refers to. |
Required if the conditions in Section C.36.2.2.5.1.1 are satisfied.
C.36.2.2.5.1 RT Control Point Attribute Concept
The treatment-modality Modules use a common formalism to represent parameters that define the behaviour of a delivery device during delivery of radiation. These parameters are communicated as a sequence of values, organized as Control Points (see Sec- tion C.36.1.1.1) and represented as RT Control Points. The resolution of RT Control Points depends on the level of detail required to define the behaviour of the delivery device.
A Control Point is a point on a timeline of a delivery process. RT Control Points are sequenced using an index number starting with 1, e.g., 1, 2, 3, 4. The RT Control Point parameters reflect the state of the delivery device at that point in time. The Control Point Cu- mulative Meterset reflects the dose that has been delivered from the beginning of the delivery process up to that point in time.
For all beam deliveries there are at least two RT Control Points, corresponding to the start and end of delivery. E.g., for a simple Static Beam delivery with a constant field aperture, only two RT Control Points are needed to define the start and end, as there are no changes in-between. For a dynamic delivery, in which the MLC leaves are changing while radiation is delivered, the number of Control Points will be higher to provide enough detail to define the leaf movement with sufficient resolution to achieve the radiation fluence distribution expected for the prescribed dose.
DICOM does not specify the behavior of the machine parameters between Control Points. The planning system needs to know the hardware-specific characteristics of the delivery system for which the plan is being created.
C.36.2.2.5.1.1 Requirements for Changing Values within RT Control Point Sequence Attributes
This Section specifies when individual attributes shall be present in a Sequence.
The RT Control Point Sequence specifies a certain order of execution.
At each RT Control Point the value of various Attributes may be specified as an explicit value (which in the case of a type 2C attribute may be a null value) and if absent remain at the same value as specified previously. There are physical and mechanical implications of specifying a new value as opposed to staying at the same value, for example gear lash, floating point jitter, etc.
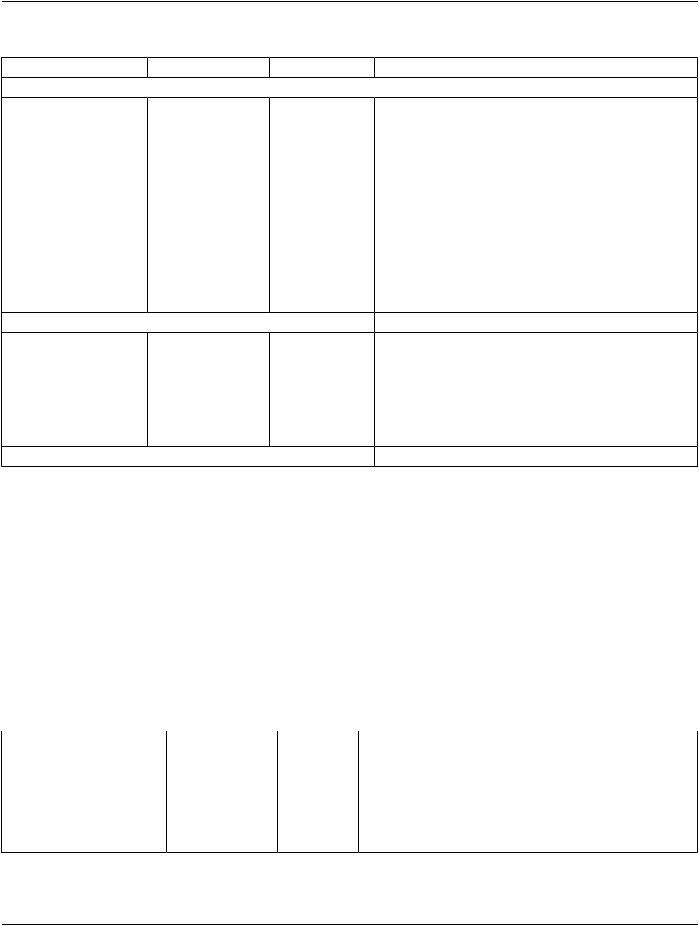
 >>Include Table 8.8-1 “Code Sequence Macro Attributes”.
>>Include Table 8.8-1 “Code Sequence Macro Attributes”. >Include Table 10-11 “SOP Instance Reference Macro Attributes”.
>Include Table 10-11 “SOP Instance Reference Macro Attributes”. DCID 19 “Patient Orientation”.
DCID 19 “Patient Orientation”. DCID 20 “Patient Orientation Modifier”.
DCID 20 “Patient Orientation Modifier”. DCID 21 “Patient Equipment Relationship”.
DCID 21 “Patient Equipment Relationship”.