Page 1446 |
DICOM PS3.3 2020a - Information Object Definitions |
Attribute Name |
Tag |
Type |
Attribute Description |
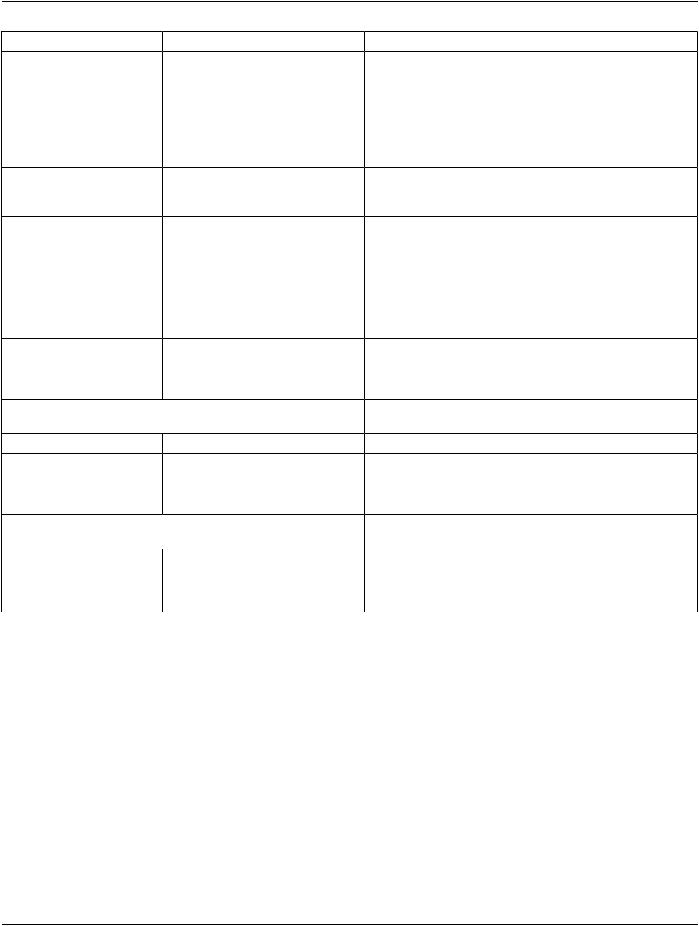
Fiducial UID |
(0070,031A) |
3 |
The globally unique identifier for this fiducial Item. |
|
|
|
Note |
The fiducial UID can be used to associate this set of graphics with other Content Items.
C.18.9.1 3D Spatial Coordinates Macro Attribute Descriptions
C.18.9.1.1 Graphic Data
Graphic Data may be used to associate an anatomic or spatial Concept with a defined set of patient relative 3D locations in a defined Frame of Reference, independent of any image. Graphic Data may be defined explicitly as a single point (i.e., to denote the epicenter of an anatomic site or lesion) or more than one point (i.e., representing a set of points or an open or closed polygon).
C.18.9.1.2 Graphic Type
This Attribute defines the type of geometry of the region of interest.
Enumerated Values:
POINT a single location denoted by a single (x,y,z) triplet
MULTIPOINTmultiple locations each denoted by an (x,y,z) triplet; the points need not be coplanar
POLYLINE a series of connected line segments with ordered vertices denoted by (x,y,z) triplets; the points need not be coplanar POLYGON a series of connected line segments with ordered vertices denoted by (x,y,z) triplets, where the first and last vertices
shall be the same forming a polygon; the points shall be coplanar
ELLIPSE an ellipse defined by four (x,y,z) triplets, the first two triplets specifying the endpoints of the major axis and the second two triplets specifying the endpoints of the minor axis
ELLIPSOID athree-dimensionalgeometricsurfacewhoseplanesectionsareeitherellipsesorcirclesandcontainsthreeintersecting orthogonal axes, "a", "b", and "c"; the ellipsoid is defined by six (x,y,z) triplets, the first and second triplets specifying the endpoints of axis "a", the third and fourth triplets specifying the endpoints of axis "b", and the fifth and sixth triplets specifying the endpoints of axis "c"
Note
1.A circle is a special case of ELLIPSE where the major and minor axis points are equidistant from the center.
2.Coplanar is in the mathematical sense and is not necessarily related to a specific image instance.
C.19 Raw Data Specific Modules
The following Modules are used by the Raw Data IOD.
C.19.1 Raw Data Module
Table C.19-1 specifies the Attributes that describe a raw data stream.
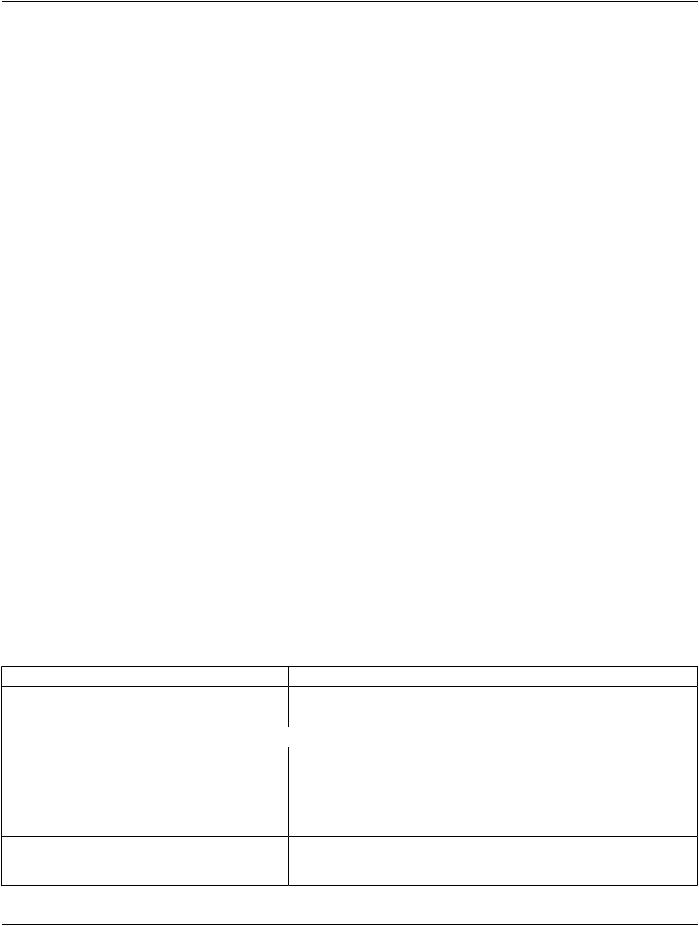
Table C.19-1. Raw Data Module Attributes
Attribute Name |
Tag |
Type |
Attribute Description |
Instance Number |
(0020,0013) |
2 |
A number that identifies this raw data. The value shall be |
|
|
|
unique within a Series. |
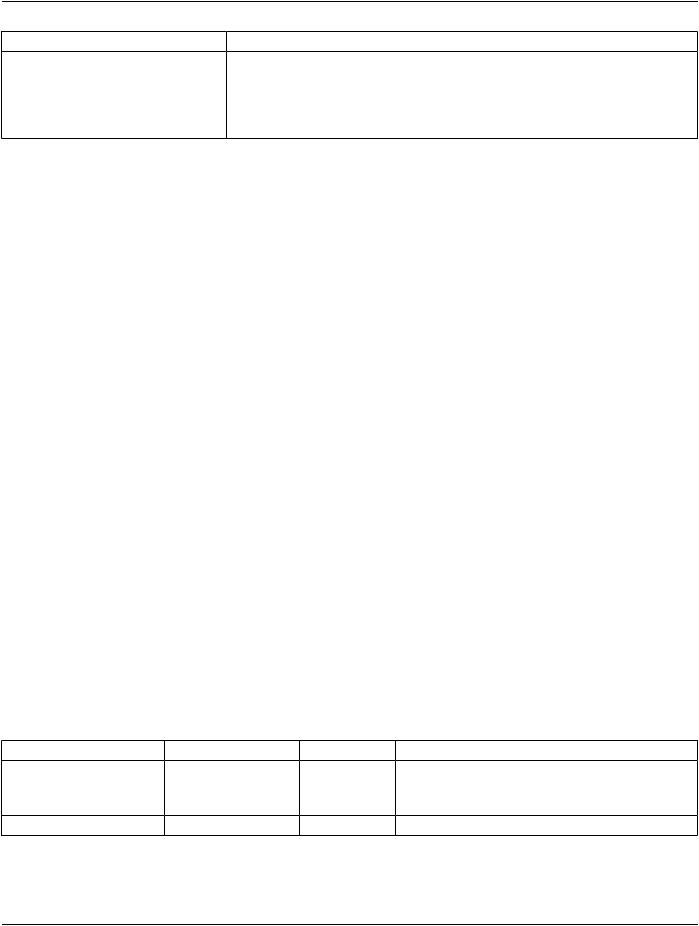
Content Date |
(0008,0023) |
1 |
The date the raw data creation was started. |
Content Time |
(0008,0033) |
1 |
The time the raw data creation was started. |
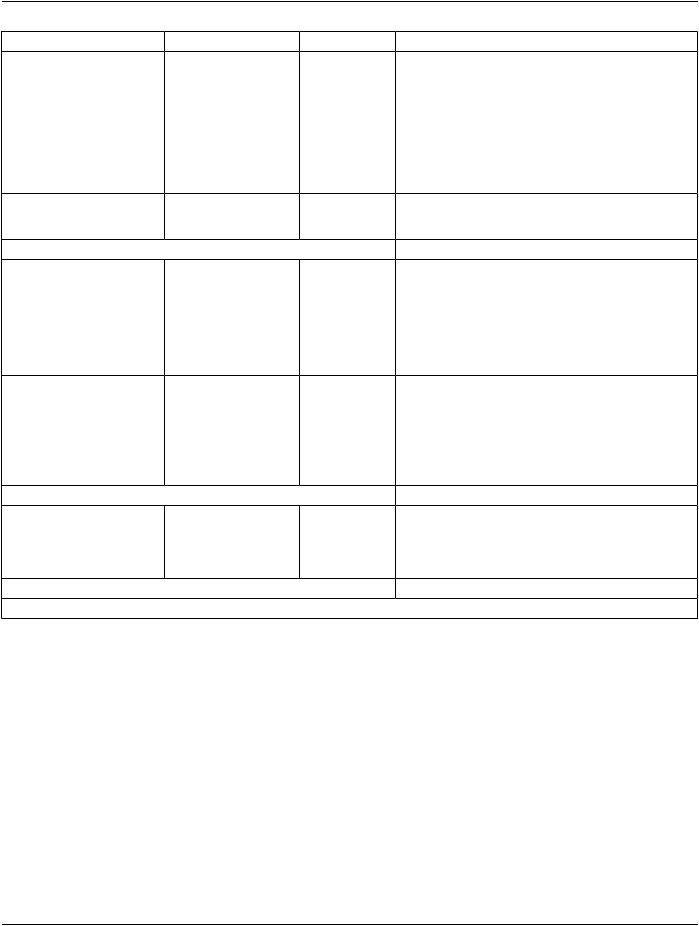
 >>>Include Table 8.8-1 “Code Sequence Macro Attributes”
>>>Include Table 8.8-1 “Code Sequence Macro Attributes” The date the content creation started.
The date the content creation started. BCID 7100 “RCS Registration Method Type”.
BCID 7100 “RCS Registration Method Type”.