Материал: основы проектирования хим произв дворецкий
226 Глава 7. НОВЫЕ ПОДХОДЫ К АППАРАТУРНО-ТЕХНОЛОГИЧЕСКОМУ ОФОРМЛЕНИЮ…
ξ2 ξij ξi+1 j
ξv2
ξ2j
ξ2L
|
|
|
|
|
|
|
|
|
ξ1L |
|
|
ξ1i |
|
|
|
ξv |
|
ξ1 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
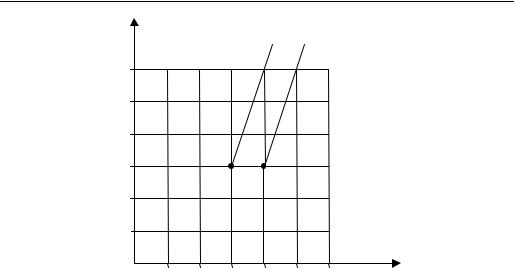
Рис. 7.2. Узловые точки двумерного интеграла |
|
|
|
|
|
|
||||||||||||||||||||
|
Введем |
p точек (ξk ) |
и (ξk ) |
на интервалах [ξL , ξU ] |
и [ξL , ξU ] , соответст- |
|||||||||||||||||||||||||
венно: |
|
|
|
|
|
1 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
1 |
1 |
2 |
2 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
ξk |
= ξL |
+ k ξ , |
k = 0,1, ..., ( p −1); |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ξ2k = ξ2L + k ξ2 , |
|
|
|
|
|
|
|
|
|
|
|||||
где |
ξ |
= |
(ξ1U − ξ1L ) |
, |
ξ |
2 |
= |
|
(ξU2 |
− ξ2L ) |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
1 |
|
|
p |
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Пересечения |
прямых |
|
(рис. |
7.2): |
ξ |
= ξi |
, |
i = 0, 1, ..., ( p −1) |
|
и |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
|
|
|
|
|
|
|
|
j J |
max |
g j (a(ν) , d (ν) , zl,(ν) , ξ) = 0 , |
|
j = 0, 1, ..., ( p −1) , |
образуют |
p2 |
точек |
|||||||||||||||||||||||
|
ξ Ξ1l,(ν) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
пересечения (узлов) |
ξij = (ξi |
, ξj ) |
(i = 0, ..., p −1, |
j = 0, ..., p −1) , где |
ξj |
=ξL |
+ j |
ξ |
2 |
, |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
2 |
2 |
|
|
|
||||
ξ j |
= ξL |
+ j |
ξ , и квадратурная формула Гаусса приближенного значения инте- |
|||||||||||||||||||||||||||
1 |
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
грала (7.58) имеет вид |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
(ξ1U − ξ1L ) |
|
|
(ξU2 − ξ2L ) |
p |
−1 |
p−1 |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
I ≈ |
|
∑ |
γ1i ∑γ2jC(a, d, zij , ξ1i , ξ2j ) , |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
i=0 |
j =0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где zij − управляющая переменная, соответствующая точке ξij . Квадратурная формула легко обобщается на п-мерный случай. В этом случае для аппроксимации многомерного интеграла потребуется pnξ узловых точек, где nξ − размер-

ДВУХЭТАПНОЕИНТЕГРИРОВАННОЕПРОЕКТИРОВАНИЕХТСВУСЛОВИЯХИНТЕРВАЛЬНОЙ… 227
ность вектора ξ. Заменяя целевую функцию ее гауссовым приближением, полу-
чим дискретный вариант ДЗИП1 (7.55) – (7.57). Здесь узловые точки используются в качестве аппроксимационных точек. Следовательно, множество
S1 = {ξi : i I1} аппроксимационных точек в задаче (7.55) – (7.57) будет состоять из pnξ точек. Для вычисления целевой функции в задаче (7.55) – (7.57) следует най-
ти значение функции С(a, d, z, ξ) pnξ раз. Размерность задачи (7.31) – (7.33) вы-
числения нижней границы будет равна nd + ( pnξ + Nc. p )nz , где nd и nz − размерности векторов d и z , соответственно, Nc. p − число критических точек.
Очевидно, что решение практических задач большой размерности может потребовать огромных вычислительных затрат.
Второй подход к вычислению интегралов основывается на процедуре Монте-Карло и близких к ней процедурах (латинского гиперкуба и последовательности проб Хаммерслея (HSS). Для этих методов известно, что число аппроксимационных точек, необходимых для вычисления интеграла с заданной точностью, не зависит от размерности вектора ξ и техника HSS наиболее
эффективна по сравнению со всеми подобными подходами. При этом даже метод HSS требует нескольких сотен аппроксимационных точек для получения разумной точности вычисления интеграла.
Техника Монте-Карло для оценки многомерного интеграла достаточно проста. Пусть имеется последовательность, состоящая из N векторов ξi , имеющих плотность распределения вероятностей P(ξ) . Тогда интеграл можно вычислить по формуле
∫C(a, d, z(ξ), P(ξ))dξ ≈ |
1 |
∑C(a, d, z(ξi ), ξi ) . |
|
||
Ξ |
N i I |
|
В качестве аппроксимационных точек можно использовать номинальную точку и все критические точки, получаемые в итерациях этого метода. Весовой коэффициент, соответствующий номинальной точке, выбирался равным 0,5, остальные коэффициенты выбирались равными 0,5 / (n – 1).
Видно, что выбор множества аппроксимационных точек в данном случае достаточно субъективен. В связи с этим рассмотрим более объективный подход к построению целевой функции в ДЗИП1. В каждой задаче можно выделить три
характерные точки. Первая точка – номинальная точка ξN . Если распределение
(неизвестное) является симметричным, то это наиболее вероятная точка. Вторая и третья точки соответствуют точкам с наилучшим и наихудшим значениями функции при фиксированных a, d, z . На основе этих точек можно сформулиро-
вать три целевые функции и три внутренние задачи оптимизации ДЗИП:

228 Глава 7. НОВЫЕ ПОДХОДЫ К АППАРАТУРНО-ТЕХНОЛОГИЧЕСКОМУ ОФОРМЛЕНИЮ…
1) |
C (a, d) = min C(a, d, z, ξN ) при условии g |
j |
(a, d, z, ξ) ≤ 0, j =1, ..., m ; |
|||||
|
1 |
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2) |
C2 (a, d) = min min C(a, d, z, ξ) при условии g j (a, d, z, ξ) ≤ 0, |
j =1, ..., m . |
||||||
|
|
z |
ξ Ξ |
|
|
|
|
|
3) |
C (a, d) = min max C(a, d, z, ξ) при условии g |
j |
(a, d, z, ξ) ≤ 0, |
j =1, ..., m . |
||||
|
3 |
z |
ξ Ξ |
|
|
|
|
|
|
|
|
|
|
|
|
||
На основе этих внутренних задач сформируем следующие три варианта ДЗИП:
Ci = min Ci (a, d), i =1, 2, 3 ;
a,d
χ1(a, d) ≤ 0 .
Существуют неравенства C2 ≤ C ≤ C3 , где C получается решением ДЗИП1
|
С1= mini |
∑γiC(a, d, zi , ξi ) ; |
|
a,d , z Z i I1 |
|
|
g(a, d, zi , ξi ) ≤ 0, i I ; |
|
|
|
1 |
χ1 |
(a, d ) = max min max g j (a, d, z, ξ) ≤ 0 |
|
|
ξ Ξ |
z Z j J |
для любого набора аппроксимационных точек и весовых коэффициентов. Таким образом, решив задачу ДЗИП для вариантов i = 2, 3, можно оценить диапазон,
в котором будет лежать оптимальное значение целевой функции ДЗИП1.
Для устранения трудоемкой операции вычисления многомерного интеграла при решении задачи ДЗИП1 используем формулировку двухэтапной задачи оптимизации, в которой минимизируется верхняя граница целевой функции. Введем семейство Ξ областей Ξα , обладающих свойством
Pr{ξ Ξα} = α .
Тогда эта задача может быть записана следующим образом:
C = |
min |
u ; |
(7.59) |
|
a,d , z(ξ),u,Ξα |
|
|
max C(a, d, z(ξ), ξ) ≤ u; |
(7.60) |
||
ξ Ξα |
|
|
|
χ1(a, d) ≤ 0 . |
|
(7.61) |
|
Обозначим решение этой задачи через a , d , z (ξ), u , Ξα . Поскольку огра-
ничение C(a , d , z (ξ), ξ) − u ≤ 0 удовлетворяется в каждой точке области Ξα , то вероятность удовлетворения этого неравенства равна α . Это означает, что с вероятностью α целевая функция будет меньше, чем u .

ДВУХЭТАПНОЕИНТЕГРИРОВАННОЕПРОЕКТИРОВАНИЕХТСВУСЛОВИЯХИНТЕРВАЛЬНОЙ… 229
Рассмотрим задачу получения верхней оценки величины u . Для этого выберем какую-либо одну область Ξ1α из семейства Ξ и решим задачу (7.59) – (7.61) при фиксированной области Ξα = Ξ1α
min u ;
a,d , z(ξ),u
max C(a, d, z(ξ), ξ) ≤ u , χ1(a, d) ≤ 0 .
Пусть получено оптимальное значение u1 . Поскольку взята произвольная область из семейства Ξ , то имеет место соотношение u1 ≥ u . Таким образом,
с вероятностью α целевая функция будет меньше, чем u1 . Поскольку при α =1 семейство Ξ состоит из одной области Ξ , то в этом случае получается точное
решение. Отсюда ясно, что чем ближе α к единице, тем ближе u1 к u .
Если все параметры ξi |
являются независимыми и имеют нормальное рас- |
||||||||||||
пределение, то область Ξα является многомерным прямоугольником вида |
|||||||||||||
Ξ |
α |
={ξ: ξN − k |
σ |
i |
≤ ξ |
i |
≤ ξN + k |
σ |
, |
I =1, ..., n } , |
|||
|
i |
i |
|
|
|
i |
i |
i |
|
ξ |
|||
где ξN − номинальная точка и величина ki |
определяются следующим образом: |
||||||||||||
N |
|
N |
|
1/ nξ |
. |
|
|
|
|
|
|
||
Pr{ξi − kiσi ≤ ξi ≤ ξi + kiσi} = α |
|
|
|
|
|
|
|
|
|||||
Если параметры ξi не являются независимыми, но имеют нормальное распределение, то область Ξα является многомерным эллипсоидом.
Структура задачи (7.59) – (7.61) близка к структуре ДЗИП1 и не требует вычисления многомерных материалов, но трудоемкость ее решения будет намного меньше трудоемкости решения ДЗИП1.
При интегрированном проектировании возможно оценить средние потери энергии, связанные с необходимостью выполнения регламентных требований, проектных ограничений и неточности исходной математической модели ХТС – y = (a, d, z, ξ) . Пусть a , d – решение задачи ДЗИП1, а z (a , d , ξ) – реше-
ние внутренней задачи (7.17) при фиксированных a , d и параметре ξ. Чтобы поддерживать значение управляющей переменной на уровне z (a , d , ξ) , необходимо расходовать энергию. Например, если zl – температура, то необходимо
тепло, чтобы поддерживать температуру zl ; если zl – расход некоторого потока, то необходима энергия для насоса или компрессора, поддерживающего требуемое значение потока. Таким образом, величина z (a , d , ξ) непосредственно связана с потребляемой энергией. Предположим, что потребляемая энергия пропорциональна величине z (a , d , ξ) с коэффициентом пропорциональности ki.
230 Глава 7. НОВЫЕ ПОДХОДЫ К АППАРАТУРНО-ТЕХНОЛОГИЧЕСКОМУ ОФОРМЛЕНИЮ…
Тогда среднее потребление энергии, связанное с реализацией оптимального значения i-й управляющей переменной, определяется величиной
nz
I = ∫∑ki zi (a , d , ξ) P(ξ) dξ .
Ξ i=1
В этом случае аналогично коэффициентам запаса конструктивных переменных можно ввести понятие энергетического коэффициента запаса ηE :
ηE = (I − IN ) IN ,
IN ,
где IN – потребляемая энергия при номинальных значениях неопределенных параметров.
Двухэтапная задача оптимизации с мягкими (вероятностными) ограничениями
Предположим, что на этапе функционирования ХТС можно определить точные значения всех неопределенных параметров, при этом все ограничения являются мягкими и должны быть выполнены с заданной вероятностью ρ.
В качестве критерия оптимизации в задаче ДЗИП2 как и в задаче ДЗИП1 используем математическое ожидание исходной целевой функции С(a, d, z, ξ)
I = |
min |
Mξ{C(a, d, z, |
ξ}; |
|
|
a,d ,z(ξ),α |
|
|
|
Prξ{g j (a, d, z(ξ), ξ) ≤ 0}≥ ρj , |
j J1, |
|
||
или верхнюю границу α исходной целевой функции С(a, d, z, ξ) : |
|
|||
|
I = |
min α ; |
|
(7.62) |
|
|
a,d , z(ξ),α |
|
|
Prξ{g0 = С(a, d, z(ξ), ξ) − α ≤ 0}≥ ρ0 ; |
(7.63) |
|||
Prξ{g j (a, d, z(ξ), ξ) ≤ 0}≥ ρj , |
j J1. |
(7.64) |
||
В задаче (7.62) – (7.64) |
α − скалярная переменная (зависящая от значений |
|||
конструктивных и режимных переменных); Pr{•}− вероятность выполнения огра-
ничения {•}; g0 , g j − функции ограничений; g0 (a, d, z(ξ), ξ) = С(a, d, z(ξ), ξ) – целевая функция (критерий) задачи оптимизации; ρ0 , ρ j −заданные значения вероятности выполнения ограничений.
|
g j (a, d, z, ξ) − α , j = 0 , |
|
|
|
|
|
j J = 0 IJ |
||||
Введем обозначения g j (a, d, z, ξ) = |
ξ) , j J , |
||||
и множество S (ν) = {ξi : i I (ν) } |
g j (a, d, z, |
|
|
|
|
накопления точек |
ξ, в которых нарушаются |
||||