Материал: основы проектирования хим произв дворецкий
МЕТОДОЛОГИЯ ИНТЕГРИРОВАННОГО ПРОЕКТИРОВАНИЯ ХТС |
181 |
|
|
нологического оборудования, а вектор d – размерами оборудования. Эти переменные, как правило, считаются неизменными, когда проект реализован, и не меняются в процессе функционирования ХТС.
Вектор z ассоциируется с режимами функционирования ХТС и обозначает управляющие переменные, точнее оптимальные задания регуляторам САУ, которыми можно манипулировать в процессе функционирования химикотехнологического объекта таким образом, чтобы, во-первых, выполнялись требования ТЗ и обеспечивалась работоспособность о объекта, и, во вторых, минимизировались эксплуатационные затраты.
Вектор ξ задает неопределенные параметры. Предположим, что нам задано номинальное значение вектора неопределенных параметров ξN и ожидаемые
отклонения Δξ+, Δξ– от номинального значения ξL = ξN − ξ− , ξU = ξN + ξ+ .
Тогда область Ξ, содержащую все возможные значения неопределенных параметров, можно представить в виде
Ξ ={ξ ξL ≤ ξ ≤ ξU } .
Традиционно при проектировании ХТС решается более простая, в отличие от (6.1), (6.2), задача оптимизации
|
|
(d, y, z, ξN ) , |
(6.3) |
min I |
|||
d , z |
|
||
при связях и ограничениях |
|
||
y = (d, z, ξ) ; |
(6.4) |
||
g j (d, z, ξ) ≡ y j зад − y j ≤ 0 , j =1, ..., m , |
(6.5) |
||
где Ī(•) – критерий оптимального проектирования; y, d, z, ξ – векторы выходных, конструктивных, режимных (управляющих) переменных и неопределенных параметров проектируемого объекта соответственно; y = (d, z, ξ) – оператор ма-
тематической модели химико-технологического объекта; уj зад − предельно до-
пустимое значение j-й выходной переменной химико-технологического объекта; g j (d, z, ξ) ≤0, j =1,...,m – функции ограничений; ξN – номинальное значение век-
тора неопределенных параметров.
Если вектор выходных переменных (или переменных состояния) y выразить (может быть неявно) как функцию d, z, ξN из уравнений материального и теплового балансов Q(d, z, y, ξ) = 0 у = (d, z, ξ) и подставить в зависимости
I (d, y, z, ξN ) и g(d, y, z, ξN ) , то получим известную «приведенную» постанов-
ку задачи оптимизации конструктивных и режимных переменных химикотехнологического объекта при интегрированном проектировании:

182 Глава6. ИНТЕГРИРОВАННОЕПРОЕКТИРОВАНИЕХИМИКО-ТЕХНОЛОГИЧЕСКИХПРОЦЕССОВ…
min I (d, z, ξN ) |
(6.6) |
|
d , z |
|
|
при ограничениях |
|
|
g j (d, z, ξN ) ≤ 0, |
j J . |
(6.7) |
В этом случае решение задачи оптимального проектирования по критерию |
||
I = I (d, z, ξ) и с функциями-ограничениями |
g j = g j (d, z, ξ), |
j =1, ..., m, оказы- |
вается неопределенным и зависит от значения, которое принял вектор ξ. Ограничения в задаче оптимального проектирования могут быть «жестки-
ми» (безусловными) и «мягкими» (вероятностными). Жесткие ограничения не должны нарушаться ни при каких условиях. Мягкие ограничения должны выполняться с заданной вероятностью. Большинство реальных задач относится к случаю, когда часть ограничений является «жесткими», другая часть – »мягкими». Например, ограничения по безопасности промышленного аппарата относятся к разделу «жестких», а ограничения на производительность и селективность могут быть отнесены к разделу «мягких».
Традиционный путь преодоления данного затруднения состоит в следующем. Вектору неопределенных параметров приписывают некое «номинальное»
значение ξ = ξN и решают задачу проектирования при номинальном ξN с полу-
чением номинального значения вектора конструктивных переменных d N при заданном типе аппаратурного оформления. После этого на основе имеющихся знаний о проектируемом объекте и интуиции вводят так называемые коэффици-
енты запаса ki (ki >1) и принимают при проектировании di = ki diN , где di – i-я компонента вектора d, i =1, ..., n (длина и диаметр реактора, поверхность тепло-
обмена в теплообменнике, число тарелок в ректификационной колонне и т.п.). Недостатки данного подхода очевидны, так как он не гарантирует ни опти-
мальности полученного решения, ни того, что все ограничения будут выполнены во время эксплуатации промышленного аппарата. Если коэффициенты запаса окажутся недостаточными, то ограничения будут нарушены, если слишком большими, то проект не будет экономичным.
Существенно более правильным и научно обоснованным является подход, когда неопределенность в коэффициентах математического описания и технологических параметрах учитывается в самой постановке задачи интегрированного проектирования.
Важнейшим компонентом работоспособности проектируемой ХТС является «гибкость» – способность ХТС иметь допустимую рабочую точку (режим) функционирования для всего диапазона Ξ неопределенных условий, которые могут возникать в процессе эксплуатации ХТС. Понятно, что и другие компоненты работоспособности ХТС, такие как управляемость, надежность, безопасность и другие в равной степени важны. Тем не менее исследование гибкости проекти-
МЕТОДОЛОГИЯ ИНТЕГРИРОВАННОГО ПРОЕКТИРОВАНИЯ ХТС |
183 |
|
|
руемой ХТС – это первый шаг, который должен быть сделан для оценки работоспособности проекта.
Можно сформулировать две задачи, связанные с анализом гибкости проектируемой ХТС: оценка работоспособности ХТС для априори заданного интервала неопределенности; количественная оценка индекса гибкости проекта и определение максимально достижимого уровня индекса гибкости проекта.
Задача анализа работоспособности проектируемой ХТС, определяемой вектором проектных (конструктивных) параметров d, будет заключаться в определении управляющих переменных z таких, чтобы выполнить ограничения (требования по спецификации качества выпускаемой продукции, производительности, надежности технологического оборудования, безопасности производства и др.):
g j (d, z, ξ) ≤ 0, j J |
(6.8) |
для всех ξ Ξ . |
|
Рассмотрим при фиксированном ξ следующую задачу: |
|
η(d, ξ) = min max g j (d, z, ξ) , |
(6.9) |
z j J |
|
где η (d, ξ) – функция выполнимости ограничений (6.8). Если η(d, ξ) ≤ 0 , то
проектируемый технический объект, описываемый вектором d, работоспособен при фиксированном ξ; в противном случае, при η(d, ξ) > 0 – неработоспособен
при фиксированном ξ.
При η(d, ξ) = 0 проектируемый технический объект с вектором d находится на границе допустимой области функционирования, поскольку в этом случае g j (d, z, ξ) = 0 хотя бы для одного номера j J . Задачу (6.9) можно переформу-
лировать в форме стандартной задачи математического программирования, определяя скалярную величину α такую, что
η(d, ξ) = min α |
(6.10) |
z, α |
|
при ограничениях |
|
g j (d, z, ξ) ≤ α, j J . |
(6.11) |
Если g j (•) − нелинейные функции по z, то задача (6.10)–(6.11) представляет
собой задачу нелинейного программирования.
Для установления работоспособности проектируемой ХТС необходимо убедиться в том, что η(d, ξ) ≤ 0 для всех ξ Ξ . В этом случае задача анализа гиб-
кости проектируемой ХТС, описываемой вектором проектных параметров d, может быть сформулирована в виде
χ(d) = max η(d, ξ) , |
(6.12) |
ξ Ξ
где χ(d) – соответствует функции гибкости проекта ХТС с вектором d.

184 Глава6. ИНТЕГРИРОВАННОЕПРОЕКТИРОВАНИЕХИМИКО-ТЕХНОЛОГИЧЕСКИХПРОЦЕССОВ…
При χ(d) ≤ 0 допустимое функционирование (работоспособность) ХТС мо-
жет быть достигнуто для всей области Ξ возможных изменений вектора неопределенных параметров ξ.
При χ(d) > 0 допустимое функционирование ХТС невозможно для некото-
рой подобласти Ξ.
Математическая постановка задачи (6.13) анализа гибкости проектируемой ХТС может быть сформулирована в виде
χ(d) = max min max g j (d, z, ξ) . |
(6.13) |
ξ Ξ z j J |
|
Введем количественную оценку гибкости проекта, определяемого вектором конструктивных параметров d.
Для этого запишем область изменения неопределенных параметров в виде
Ξ(δ) ={ξ ξN − δ ξ− ≤ ξ ≤N +δ ξ+},
где δ – неотрицательная скалярная переменная: при δ = 1 имеем Ξ(1) = Ξ ; при
δ < 1 – Ξ(δ) Ξ ; при δ > 1 – Ξ Ξ(δ) .
Определение. Будем называть индексом гибкости F наибольшее значение δ, для которого выполняются ограничения (6.8) для всей области Ξ(F).
Сформулируем математическую постановку задачи (6.14) определения индекса гибкости F проектируемой ХТС, описываемого вектором проектных параметров d
F = max δ
при ограничениях
χ(d) = max min max g j (d, z, ξ) ≤ 0 , |
|
|
ξ Ξ(δ) z |
j J |
|
Ξ(δ)= {ξ | ξN − δ |
ξ− ≤ ξ ≤ ξN + δ ξ+}, |
(6.14) |
Ξ(F )= {ξ ξN − F ξ− ≤ ξ ≤ ξN + F ξ+}.
Значения неопределенных параметров ξс Ξ(F ), соответствующие реше-
нию задачи (6.13), называются критическими точками.
Если удается установить, что критические точки соответствуют вершинам многогранника Ξ(F), то решение задач (6.13) и (6.14) может быть значительно упрощено. Рассмотрим задачу анализа гибкости проекта в предположении, что ξk, k K представляют вершины многогранника Ξ. В этом случае можно записать, что
χ(d )= max η(d, ξk ),
k K
где η (d, ξk) находится из решения задачи оптимизации (6.9).
МЕТОДОЛОГИЯ ИНТЕГРИРОВАННОГО ПРОЕКТИРОВАНИЯ ХТС |
185 |
|
|
Следует заметить, что в задаче (6.13) величина χ(d) достигает нулевого значения, χ(d) = 0, в точке оптимального решения, поскольку критическая точка всегда будет находиться на границе допустимой области функционирования ХТС. Пусть Δξk, k K обозначает направление от номинальной точки ξN до k-й вершины многогранника Ξ. Тогда максимальное отклонение δk от границы вдоль Δδk мы получим из решения следующей экстремальной задачи:
δk = max δ, |
k K |
z, δ |
|
при ограничениях |
|
g(d, z, ξk ) ≤ 0, |
j J , |
ξk = ξN + δ |
ξk . |
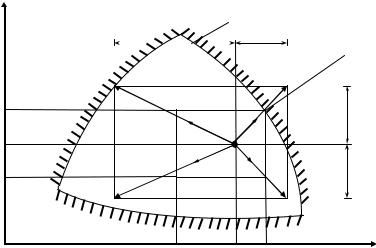
Анализ полученных прямоугольных областей изменения ξ показывает, что только наименьший прямоугольник может быть вписан в допустимую область, который определяет индекс гибкости
F = min{δk }.
k K
На рисунке 6.5 изображен диапазон изменения вектора неопределенных параметров ξ, который ассоциируется с индексом гибкости для данного проекта ХТС [28, 37].
Следует заметить, что только при условии выпуклости функций g j (•) по
переменным z и ξ критические точки ξc будут соответствовать вершинам многогранника Ξ.
ξ2
ξ2N + F ξ+2
ξ2N
ξ2N − F ξ−2
|
η(d,ξ) = 0 |
|
ξ1− |
ξ1+ |
ξc |
Ξ(F ) |
ξ2+ |
|
ξ− |
|
2 |
ξ1N − F ξ1− ξ1N |
ξ1N + F ξ1− |
ξ1 |
Рис. 6.5. Наибольшая допустимая область изменения параметров ξ