Материал: Мостовой кран ЭСПЦ ММК
Рисунок 6 – Принципиальная схема пассивного фильтра VW3 A4 612
Также преобразователь частоты снабжён входными фильтрами подавления радиопомех в соответствии со стандартом МЭК/EN 61800-3, второе издание, категория C2 или C3 для окружения 1 или 2, относящемуся к приводным устройствам регулирования скорости и требованиям ЕС по электромагнитной совместимости (ЭМС).
И ещё ПЧ имеет дополнительные входные фильтры ЭМС VW3 A4 411. Эти фильтры предназначены для уменьшения наведённого излучения в сети ниже пределов, установленных стандартами EN 55011, группа 1, класс A или B и МЭК/EN 61800/3, категория C2 или C3.
5.3 Контроль изоляции
Перед преобразователем частоты и после него ставится узел контроля изоляции тока на землю типа Vigilohm XL308 фирмы Schneider Electric, который имеет следующие параметры:
Линейное напряжение: до 1700 В;
Электрическая прочность: 2500 В;
Уставка предупредительного сигнала: 1 – 299 кОм;
Уставка срабатывания сигнализации: 0,2 – 99,9 кОм.
6 Разработка системы управления мехатронной системой
В зависимости от требований, предъявляемых к электроприводу лебедки, ограничения скорости и крутящего момента требуются как с точки зрения динамики, так и с точки зрения статики. Это может обеспечить только векторный контроль. Этот контроль достигает динамических характеристик, близких к двигателю постоянного тока. Это достигается путем раздельного управления компонентами тока статора, отвечающими за момент и поле. Таким образом, точное управление крутящим моментом становится возможным.
Мы выбираем векторную систему управления с косвенным регулированием координат, которая программно реализована на основе микроконтроллера Simovert MD VectorControl, где информация о векторах потокосцепления АД получается косвенным образом на основе математических моделей. В этом случае базовая структура представляет собой управляющую структуру с непрямой ориентацией вдоль вектора магнитного потока ротора и модульным принципом структуры системы управления.
Система имеет два основных канала управления: канал управления угловой скоростью и канал управления модулем потокосцепления ротора 2 АД. Также система имеет 2 подчиненных им внутренних контура регулирования составляющих тока статора I1x и I1у в осях х и у ортогональной системы координат, вращающейся с синхронной скоростью 0 электромагнитного поля двигателя.
Для моделирования цепи необходимо знать величины индуктивности и сопротивления цепи ротора и статора, а также индуктивность цепи намагничивания. Необходимые данные определяем ниже.
Скорость вращения магнитного поля определяется выражением:

где
 – номинальная частота питающей сети,
Гц.
– номинальная частота питающей сети,
Гц.
Величина номинального скольжения вычисляется по формуле:

где
 – номинальная скорость двигателя,
об/мин.
– номинальная скорость двигателя,
об/мин.
Номинальная угловая скорость вращения ротора рассчитывается по формуле:

Угловая скорость вращения магнитного поля находится:

Номинальный, максимальный и пусковой моменты определяем следующим образом:


Критическое скольжение по формуле:

Механические потери равны:

Коэффициент приведения:

Номинальное фазное напряжение находим по формуле:
Приведённое активное сопротивление ротора равно:
Величина активного сопротивления статора определяется:
Подставив данные, получим:
Приведенная индуктивность рассеяния ротора:

Индуктивность статора найдем по выражению:
Подставим нужные значения и получим:
Индуктивность контура намагничивания рассчитывается следующим образом:
Подставляем данные:

Коэффициент приведения С1:

Сравнив коэффициенты приведения, убеждаемся в том, что коэффицент приведения подобран правильно.
Векторное управление частотным управляемым асинхронным электроприводом связано как с изменением частоты и значений тока переменных асинхронного двигателя, так и с относительной ориентацией их векторов в полярной или декартовой системе координат. Регулируя значения амплитуды переменных и углов между их векторами, АД полностью контролируется как в статистике, так и в динамике, что заметно улучшает качество переходных процессов по сравнению со скалярным контролем. Этот факт имеет решающее значение для выбора систем с векторным управлением.
На рисунке 7 показана структурная схема системы ПЧ-АД с управлением по потокосцеплению ротора.
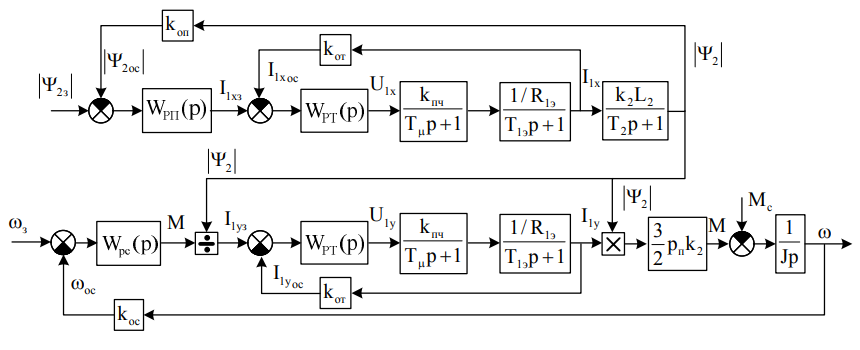
Рисунок 7 – Структурная схема системы ПЧ-АД при ориентации координат x,y по потокосцеплению ротора.
Эквивалентное сопротивление цепи статора рассчитывается следующим образом:

Электромагнитная постоянная времени этой цепи:
Коэффициент обратной связи по току равен:

Постоянная времени интегрирования:

где
 – эквивалентный статический коэффициент
передачи;
– эквивалентный статический коэффициент
передачи;
Передаточная функция регуляторов тока выглядит следующим образом:
Передаточная функция потокосцепления представлена ниже:
Электромагнитная постоянная времени цепи ротора рассчитывается:

Постоянная интегрирования ПИ-регулятора потокосцепления ротора:

Коэффициент обратной связи по потокосцеплению:

Максимальное потокосцепление:

При определении передаточной функции регулятора скорости необходимо учитывать, что регулятор скорости должен компенсировать влияние рабочего блока на формирование электромагнитного момента асинхронного двигателя. Для этого на выходе РС должен быть включен делитель, аналогичный системам двухфазного регулирования скорости двигателей постоянного тока. В этом случае передаточная функция регулятора скорости выглядит следующим образом:

где J∑ - суммарный момент инерции электропривода, кг*м2;
kос - коэффициент обратной связи по скорости, В·с.

Настройку контура регулирования скорости на симметричный оптимум осуществляется при помощи ПИ-регулятора скорости со следующей передаточной функцией:

Для придания сигналу задания по скорости вида S-образной характеристики, а также для уменьшения перерегулирования по моменту, после блока задания скорости установлен фильтр.
Структурная схема, реализованная в программе MatLab Simulink, представлена на рисунке 8.
7 Моделирование работы мехатронной системы
Чтобы упростить моделирование, обработку и анализ переходных процессов, операция работы мостового крана разделена на четыре характерных области:
- опускание траверсы до точки “закрепления” ковша;
- подъём ковша с металлом для дальнейшего перемещения;
- опускание пустого ковша;
- подъём траверсы до верхней точки мостового крана.
Также для достижения большей наглядности время статических режимов работы электропривода было умышлено уменьшено. Переходные процессы, смоделированные в MatLab, по схеме, представленной на рисунке 8, представлены на рисунках 9, 10, 11 и 12 .
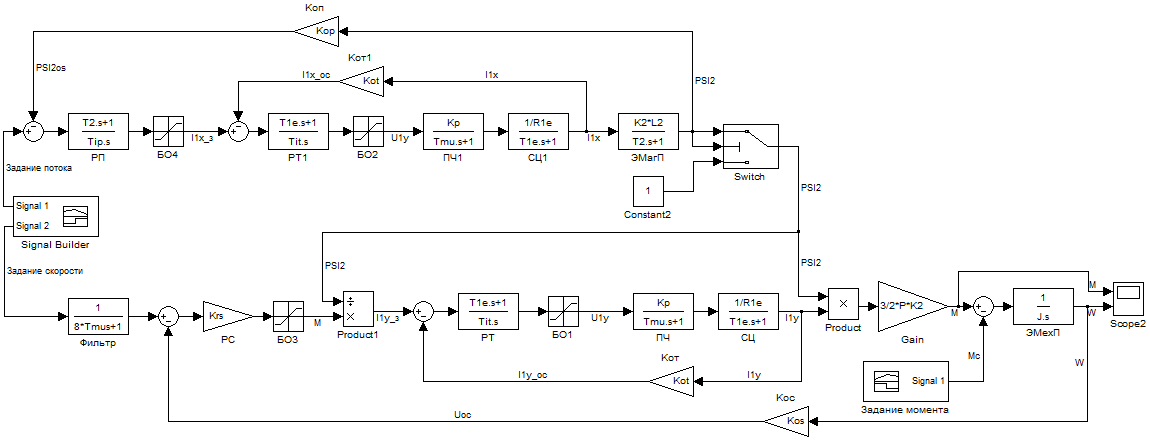
Рисунок 8 – Структурная схема системы ПЧ-АД при ориентации координат x,y по потокосцеплению ротора, реализованная в программе MatLab
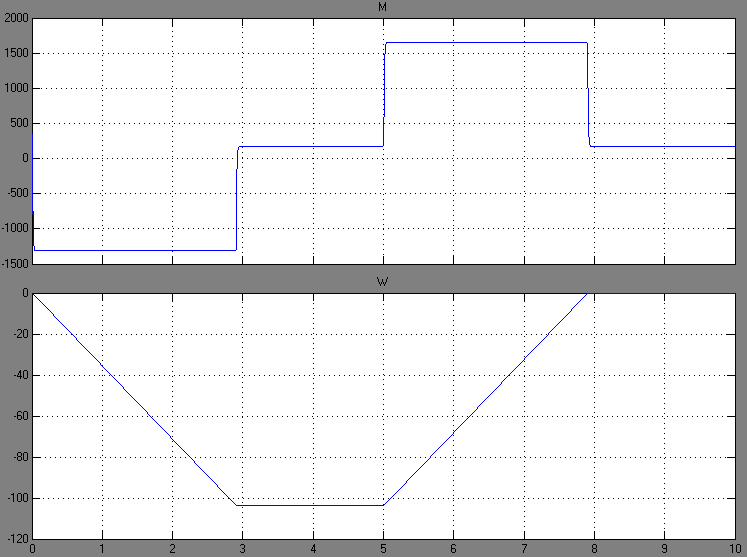
Рисунок 9 – Переходные процессы момента и скорости двигателя при опускании траверсы
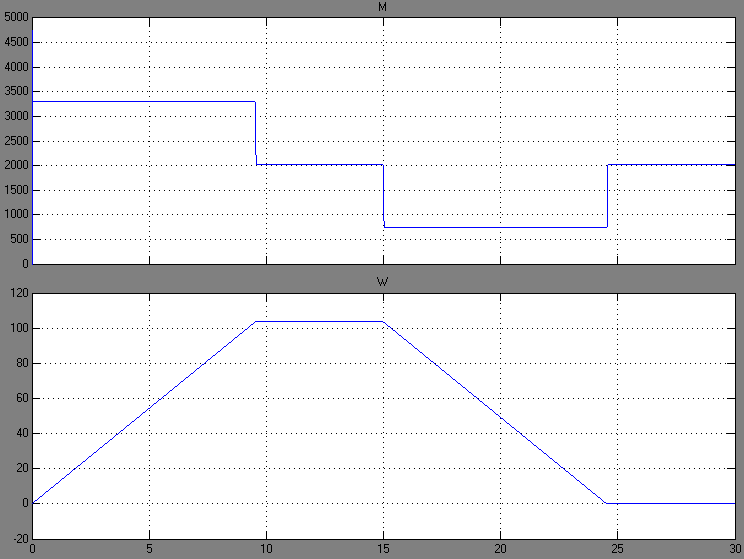
Рисунок 10 – Переходные процессы момента и скорости двигателя при подъёме ковша с металлом
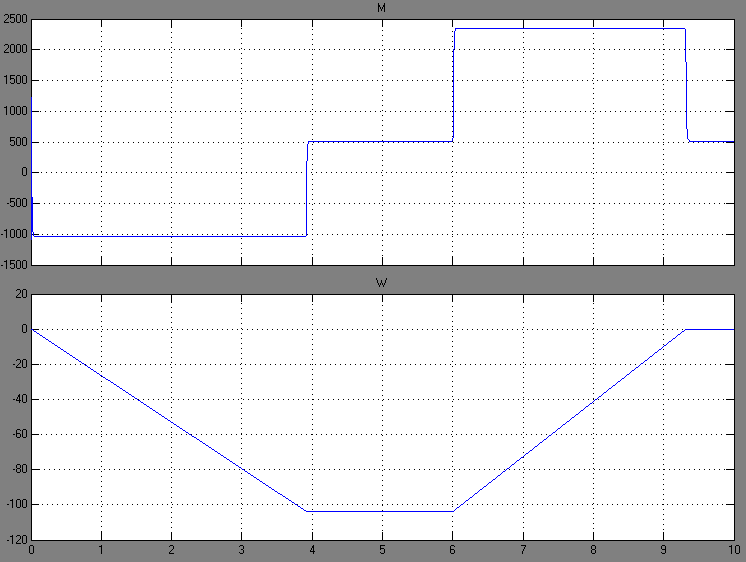
Рисунок 11 – Переходные процессы момента и скорости двигателя при опускании ковша
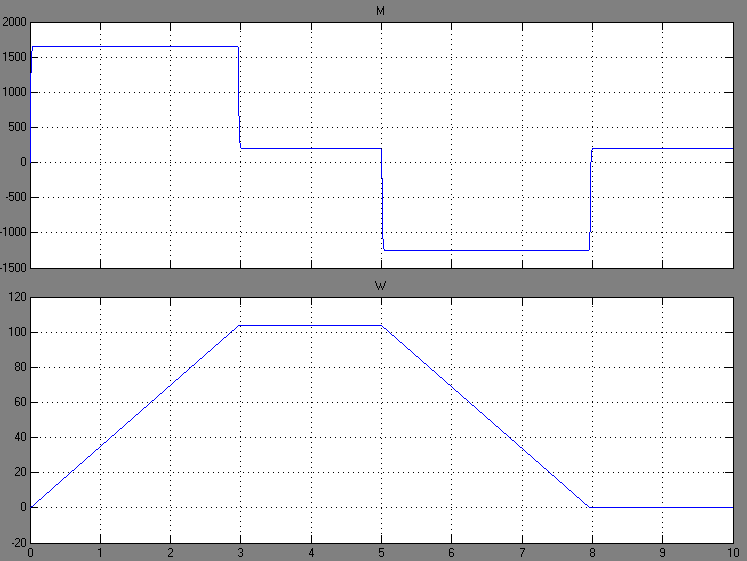
Рисунок 12 – Переходные процессы момента и скорости двигателя при подъеме траверсы
Заключение
В данной выпускной квалификационной работе описана технология работы главного подъема мостового крана №27 ЭСПЦ ПАО «ММК».
Рассчитаны и построены тахограмма и нагрузочная диаграмма. Выбран двигатель и проверил его по нагреву и перегрузочной способности. Рассчитанный привод отвечает всем технологическим требованиям.
Рассчитаны и выбраны преобразователь частоты и трансформатор.
Построены механические характеристики электропривода.
Выбрана необходимая защита силовой схемы.
Получены переходные процессы работы двигателя, по которым можно судить о состоятельности построенной системы для использования ее в механизме главного подъема мостового крана №27 ЭСПЦ ПАО «ММК».
.
Список использованных источников
Косматов В.И. Проектирование электроприводов металлургического производства: Учебное пособие. 3-е изд. перераб.-Магнитогорск: МГТУ, 2002.-224 с.
Электрооборудование металлургических кранов [Текст]/ Б. М. Рапутов - М.: Металлургия, 1977 - 248 c
Косматов В.И. Электрический привод: Учебное пособие. – Магнитогорск: ГОУ ВПО «МГТУ», 2012.
Чунихин А.А. Электрические аппараты: Учебник для вузов. — 3-е изд., перераб. и доп. — М.: Энергоатомиздат, 1988. — 720 с.
СМК-О-СМГТУ-36-16: Стандарт организации. Курсовая работа: структура, содержание, общие правила выполнения и оформления. Магнитогорск, 2016