Материал: Методичка - Практикум по СУХТП_Шифр 2-10_Кирюшин
Практическая работа № 2
6 Общее задание

Дана одноконтурная АСР, для которой определена передаточная функция регулятора (Р) с настройками и дифференциальное уравнение объекта управления (ОУ). Требуется определить:
- передаточную функцию разомкнутой системы W∞(s),
- характеристическое выражение замкнутой системы (ХВЗС),
- передаточные функции замкнутой системы Фз(s) – по заданию,
Фв(s) – по возмущению, ФЕ(s) – по ошибке,
- коэффициенты усиления АСР,
- устойчивость системы.
Пример решения задания
Дан ПИ-регулятор
с ПФ вида Wp
= 2 +
![]() и объект управления, описываемый
дифференциальным уравнением
и объект управления, описываемый
дифференциальным уравнением
![]() .
.
Определяется передаточная функция объекта:
![]() .
.
Тогда передаточная функция разомкнутой системы имеет вид:
![]() .
.
ХВЗС:
D(s) = A(s) + B(s) = 2s4 + 3s3 + s2 + 2s3 + 9s2 + 6s + 1 = 2s4 + 5s3 + 10s2 + 6s + 1.
Передаточные функции замкнутой системы:
![]() - по заданию,
- по заданию,
![]() - по ошибке,
- по ошибке,
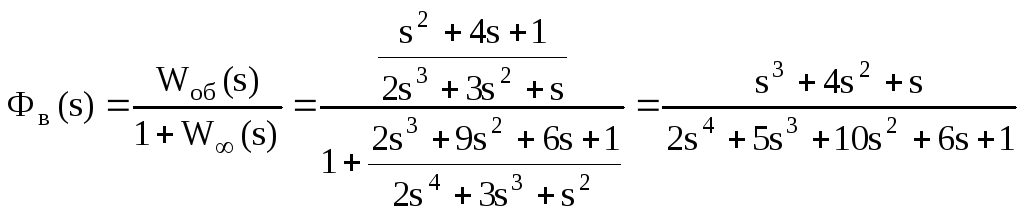 - по возмущению.
- по возмущению.
7
Кз = Фз(0) = 1 – по заданию;
КЕ = ФЕ(0) = 0 – по ошибке;
Кв = Фв(0) = 0 – по возмущению.
Устойчивость АСР определяется по критерию Гурвица.
Поскольку коэффициенты ХВЗС а4 = 2, а3 = 5, а2 = 10, а1 = 6, а0 = 1 (степень полинома n = 4), то матрица Гурвица имеет вид:
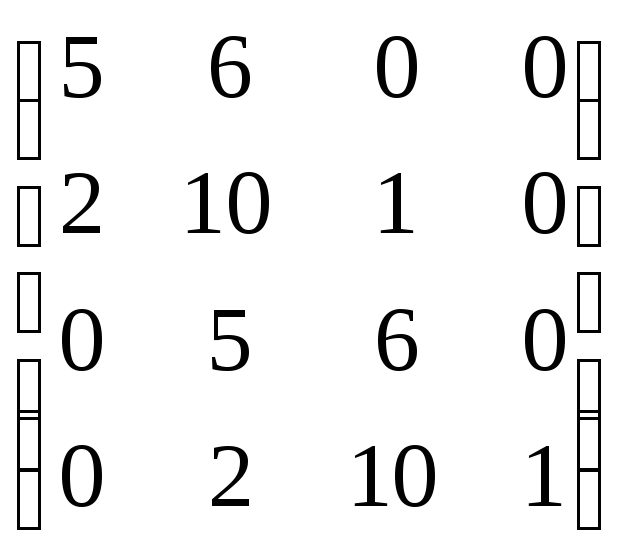
(обратите внимание на сходство строк матрицы: 1 с 3 и 2 с 4). Определители:
Δ1 = 5 > 0,
![]() ,
,

Δ4 = 1* Δ3 = 1*209 > 0.
Поскольку все определители положительны, то АСР устойчива. ♦
Варианты заданий
Вариант № 1
Р - ПИ-регулятор с
ПФ вида Wp
= 4 +
![]() ;
;
дифференциальное
уравнение ОУ: ![]() .
.
Вариант № 2
Р - ПИ-регулятор с
ПФ вида Wp
= 5 +
![]() ;
;
дифференциальное
уравнение ОУ: ![]() .
.
Вариант № 3
Р - П-регулятор с ПФ вида Wp = 0,5;
дифференциальное
уравнение ОУ: ![]() .
.
В
8
Р - ПИ-регулятор с
ПФ вида Wp
= 2 +
![]() ;
;
дифференциальное
уравнение ОУ: ![]() .
.
Вариант № 5
Р - ПИ-регулятор с
ПФ вида Wp
= 1 +
![]() ;
;
дифференциальное
уравнение ОУ: ![]() .
.
Вариант № 6
Р - П-регулятор с ПФ вида Wp = 4;
дифференциальное
уравнение ОУ: ![]() .
.
Вариант № 7
Р - ПИ-регулятор с
ПФ вида Wp
= 5 +
![]() ;
;
дифференциальное
уравнение ОУ: ![]() .
.
Вариант № 8
Р - П-регулятор с ПФ вида Wp = 8;
дифференциальное
уравнение ОУ:
![]() .
.
Вариант № 9
Р - ПИ-регулятор с
ПФ вида Wp
= 4 +
![]() ;
;
дифференциальное
уравнение ОУ: ![]() .
.
Вариант № 10
Р - И-регулятор с
ПФ вида Wp
=
![]() ;
;
дифференциальное
уравнение ОУ: ![]() .
.
Вариант № 11
Р - ПИ-регулятор с
ПФ вида Wp
= 1 +
![]() ;
;
дифференциальное
уравнение ОУ: ![]() .
.
В
9
Р - ПИ-регулятор с
ПФ вида Wp
= 1 +
![]() ;
;
дифференциальное
уравнение ОУ: ![]() .
.
Вариант № 13
Р - ПИ-регулятор с
ПФ вида Wp
= 5 +
![]() ;
;
дифференциальное
уравнение ОУ: ![]() .
.
Вариант № 14
Р - ПИ-регулятор с
ПФ вида Wp
= 1 +
![]() ;
;
дифференциальное
уравнение ОУ: ![]() .
.
Вариант № 15
Р - И-регулятор с
ПФ вида Wp
=
![]() ;
;
дифференциальное
уравнение ОУ: ![]() .
.
Вариант № 16
Р - ПИ-регулятор с
ПФ вида Wp
= 1 +
![]() ;
;
дифференциальное
уравнение ОУ: ![]() .
.
Вариант № 17
Р - ПИ-регулятор с
ПФ вида Wp
= 1 +
![]() ;
;
дифференциальное
уравнение ОУ: ![]() .
.
Вариант № 18
Р - П-регулятор с ПФ вида Wp = 2;
дифференциальное
уравнение ОУ: ![]() .
.
Вариант № 19
Р - П-регулятор с ПФ вида Wp = 4;
дифференциальное
уравнение ОУ:
![]() .
.
В
10
Р - И-регулятор с
ПФ вида Wp
=
![]() ;
;
дифференциальное
уравнение ОУ: ![]() .
.
Вариант № 21
Р - ПИ-регулятор с
ПФ вида Wp
= 2 +
![]() ;
;
дифференциальное
уравнение ОУ: ![]() .
.
Практическая работа № 3
11 Общее задание:
По табличным данным построить переходную кривую объекта, определить параметры передаточной функции объекта, рассчитать настройки ПИД-регулятора, обеспечивающие 20%-е перерегулирование.
Вариант № 1
X = 15 кПа; Y = 24 С; = 1 мин
|
t, мин |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
Y |
0,0 |
4,4 |
8,8 |
12,8 |
16,0 |
18,8 |
21,0 |
22,2 |
23,8 |
24,0 |
Вариант № 2
Xвх = 15 кПа; Y = 150 С; зап = 0,15 мин
|
t, мин |
0,00 |
0,25 |
0,50 |
0,75 |
1,00 |
1,25 |
1,50 |
1,75 |
2,00 |
2,25 |
2,50 |
2,75 |
3,00 |
|
Y |
0 |
9 |
20 |
34 |
52 |
79 |
108 |
124 |
136 |
143 |
148 |
149,7 |
150 |
Вариант № 3
Xвх = 90 м3/час; Y = 45 С; зап = 0,1 мин
|
t, мин |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
Y |
0,0 |
5,5 |
16,0 |
25,5 |
31,5 |
35,0 |
38,0 |
40,0 |
41,7 |
43,0 |
43,8 |
44,5 |
45,0 |
Вариант № 22
Р - ПИ-регулятор с
ПФ вида Wp
= 1 +
![]() ;
;
дифференциальное
уравнение ОУ: ![]() .
.
Вариант № 23
Р - ПИ-регулятор с
ПФ вида Wp
= 0,5 +
![]() ;
;
дифференциальное
уравнение ОУ: ![]() .
.
Вариант № 24
Р - П-регулятор с ПФ вида Wp = 0,1;
дифференциальное
уравнение ОУ: ![]() .
.
Вариант № 25
Р - ПИ-регулятор с
ПФ вида Wp
= 0,2 +
![]() ;
;
дифференциальное
уравнение ОУ: ![]() .
.
Вариант № 26
Р - ПИ-регулятор с
ПФ вида Wp
= 2 +
![]() ;
;
дифференциальное
уравнение ОУ: ![]() .
.