Материал: mekhatronika_UrGUPS
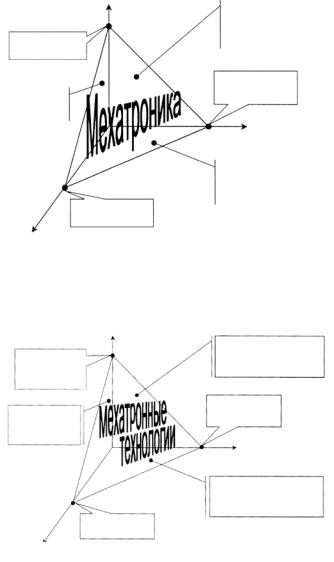
направления (электромеханика, компьютерные системы управления, системы автоматизированного проектирования механических систем). На стыке гибридных направлений возникает мехатроника.
|
Механика |
Системы |
|
|
|
|
|
автоматизированного |
Прецизионная |
|
проектирования |
|
|
|
механика |
|
|
|
|
Информационные |
Электро- |
|
технологии |
|
|
|
механика |
|
|
|
|
Информатика |
|
|
Компьютерные |
|
|
системы |
|
|
управления |
|
Микро- |
|
|
электроника |
|
Электроника
Рис. 3.1. Структурная пирамида мехатроники
Базовые и гибридные направления определяют технологический базис мехатроники (рис. 3.2) [1].
|
Технологии |
Технологии |
Прецизионные |
механики |
|
|
автоматизированного |
|
и модульные |
|
проектирования |
технологии |
|
|
механики |
|
|
Гибридные |
|
Информационные |
|
технологии |
|
технологии |
|
|
электромеха- |
|
|
ники |
|
Компьютерные |
|
|
|
|
|
технологии |
|
|
Цифровые технологии |
|
|
управления движением |
Электронные
технологии
Рис. 3.2 Технологическая пирамида мехатроники
36

Пирамидальная форма и состав технологической пирамиды мехатроники полностью соответствует ее структурному базису.
Фундаментом технологического базиса мехатроники являются новые технологии всех базисных направлений – прецизионные и модульные технологии механики, микроэлектронные и информационные технологии. Объединения указанных технологий представляют комбинированные технологии, принадлежащие граням технологической пирамиды, к которым можно отнести:
–гибридные технологии электромеханики;
–цифровые технологии управления движением;
–технологии автоматизированного проектирования.
3.1.1. Гибридные технологии электромеханики
Все компоненты мехатронных модулей делятся на две большие группы:
1)исполнительные элементы, к которым отнесены механические
иэлектротехнические элементы (двигатели, преобразователи движения, направляющие, тормоза и т. д.);
2)интеллектуальные элементы, куда входят силовые электронные блоки, информационные и управляющие элементы.
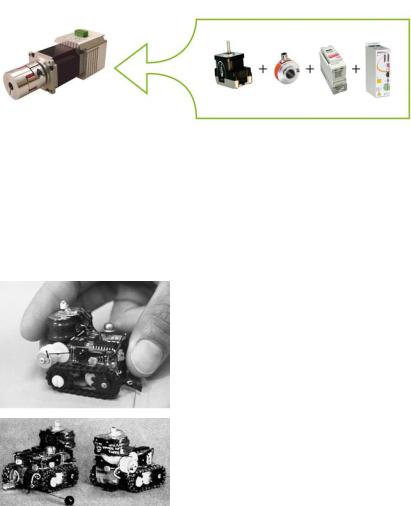
Гибридные технологии предполагают наличие двух этапов технологической интеграции элементов первой и второй группы элементов. К первому относятся операции изготовления гибридных элементов, а ко второму – гибридная сборка мехатронных модулей и машин из гибридных элементов. При этом допускается, что элементы обеих групп изготавливаются независимо и параллельно на различных технологических линиях, либо приобретаются у различных производителей (по заранее согласованным спецификациям). Гибридная же сборка соответствует конструкторской идее объединения (интеграции) разнообразных гибридных элементов в едином корпусе. Пример интеграции исполнительных элементов через гибридную сборку – интегрированный сервопривод СПШ 10 (ЗАО «Сервотехника») (рис. 3.3).
В состав СПШ 10 входят следую- |
Рис. 3.3. Внешний вид интег- |
щие сборочные единицы: гибридный |
рированного сервопривода |
шаговый двигатель, преобразователь |
СПШ 10 |
37
частоты на основе высокопроизводительного DSP процессора, датчик углового перемещения, программируемый логический контроллер (PLC), промышленный интерфейс CAN. Схема гибридной сборки СПШ 10 из гибридных элементов показана на рис. 3.4.
Датчик Контроллер позиции
Сервопривод шаговый |
Двигатель |
Преобразователь |
|
частоты |
|
|
|
Рис. 3.4. Схема гибридизации привода СПШ 10
Сервопривод СПШ 10 предназначен для максимально широкого применения в различных областях машиностроения.
Достоинства сервопривода СПШ 10:
–бесшаговое (векторное) управление на основе адаптированного для шаговых двигателей алгоритма;
–высокие динамические показатели за счет использования замк-
|
нутого контура регулирования тока; |
|
– замкнутый контур скорости; |
|
– низкая вибрация за счет динамически |
|
регулируемого усилия; |
|
– простота монтажа; |
|
– небольшие массогабаритные пока- |
|
затели. |
|
Гибридные технологии изготов- |
|
ления нашли широкое применение |
|
в производстве микроэлектромехани- |
|
ческих систем (МЭМС). Типичны- |
|
ми представителями МЭМС являются |
|
мобильные микророботы. В лаборато- |
|
рии искусственного интеллекта (США, |
|
Кембридж) создано несколько типов |
Рис. 3.5. Автономный мобиль- |
мобильных микророботов с исполь- |
ный микроробот Ant (MIT Arti- |
зованием гусеничного движителя |
ficial Intelligence Lab) |
(рис. 3.5) [9]. |
38

Его основное преимущество – полная автономность, так как использование минидвигателей постоянного тока не требует мощных источников питания: вполне достаточно применение Ni-Cd аккумулятора. К преимуществу также относится его высокая маневренность: гусеничный привод позволяет разворачиваться практически на месте и реализовать одновременно линейное и вращательное движения.
К недостаткам следует отнести сложную механическую систему, наличие редуктора. Это приводит к необходимости бороться с зазорами и люфтами. Уменьшить их влияние на характер и качество движения возможно путем усложнения конструкции или парированием их программным путем в системе управления. Использование гусеничного привода влечет за собой потерю значительной доли энергии на преодоление силы трения.
Основное назначение таких «игрушек» – это отработка механизмов построения самоорганизованных колоний таких механизмов (за основу самоорганизации взяты механизмы поведения муравьев). Поэтому этот прототип и получил название Ant (англ. «муравей»). При завершении работ по этой тематике ученые надеются получить группу микророботов, способных выбирать самостоятельно стратегию достижения цели, решать вопросы централизации или, наоборот, децентрализации управления и т. д.
Развитие МЭМС-технологий позволило создать сенсоры, в конструкции которых реализовано объединение функций измерения текущих параметров механического движения, их преобразования и обработки по заданным алгоритмам в едином блоке – интеллектуальные сенсоры.
3.1.2. Цифровые технологии управления движением
Современные технологии управления движением мехатронных систем базируются на достижениях микроэлектроники и новых информационных технологиях. Аппаратные средства обычно конструктивно встраиваются в мехатронные модули. Технологически это достигается за счет высокой плотности схем, уменьшения монтажных соединений и использования твердотельных элементов.
Аппаратные средства управления включают в себя:
–силовые преобразователи, которые являются связующим звеном между устройством компьютерного управления и исполнительными органами (двигателями);
39
–цифровые сигнальные процессоры, устанавливаемые в инфор- мационно-измерительных каналах для нормирования фильтрации, аналого-цифрового и цифро-аналогового преобразования, оцифровки и кодирования аналоговых сигналов;
–программируемые интегральные микросхемы, позволяющие программно реализовать необходимые управляющие функции – декодирование сигналов, цифровую широтно-импульс- ную модуляцию, различные математические операции, необходимые для реализации управления;
–контроллеры движения.
Вобласти микроэлектроники основными типами силовых электронных приборов являются силовые полевые транзисторы (MOSFET), биполярные транзисторы с изолированным затвором (IGBT), коммутируемые тиристоры (GTO) и интеллектуальные силовые модули (IPM). Новое поколение приборов отличается высоким быстродействием (для транзисторов MOSFET частота коммутаций до 100 кГц), высокими значениями коммутируемых токов и напряжений (для транзисторов IGBT предельная сила коммутируемого тока до 2400 А,
апредельное коммутируемое напряжение до 3300 В), малыми коммутативными потерями и малой мощностью управления.
Вмехатронике интеллектуальные модули стали базой для создания новых силовых преобразователей в каналах управления движением, а также защитных и диагностирующих устройств.
Внастоящее время ряд фирм INTEL, ANALOG DIVICES, ATMEL, MICROCHIP, TEXAS INSTRUMENTS и другие разработали
широкую линейку цифровых сигнальных процессоров (DSP – digital signal processors). DSP – специализированный микропроцессор, предназначенный для цифровой обработки сигналов (обычно в реальном масштабе времени).
Архитектура сигнальных процессоров имеет некоторые важные особенности по сравнению с микропроцессорами настольных компьютеров. Сигнальные процессоры строятся на основе «Гарвардской архитектуры», отличительной особенностью которой является то, что программы и данные хранятся в различных устройствах памяти – памяти программ и памяти данных. Поэтому DSP может производить одновременные обращения как к памяти команд, так и к памяти данных в отличие от архитектуры фон Неймана, которая предполагает раздельное обращение к устройствам памяти (рис. 3.6).
40