Материал: лекция 5 ММОСУ
с круговой |
|
частотой |
ω и |
периодом |
T 2 , |
амплитуда |
которых |
|||
|
|
|
|
|
|
|
|
|
A1 y 0 ,A0 |
|
A |
A |
2 |
A |
2 |
зависит |
от |
начальных |
условий: |
|
|
|
|
y 0 |
||||||||
|
0 |
1 |
|
|
|
|
|
|
||
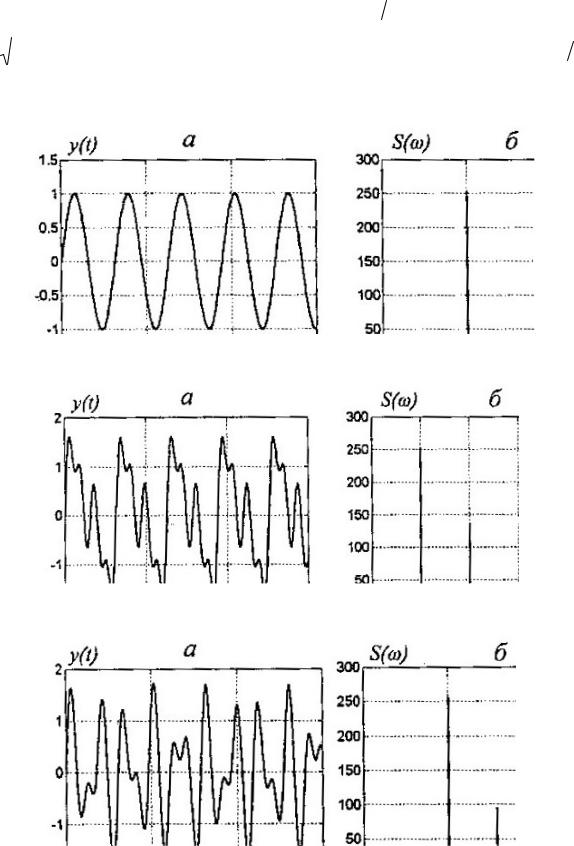
(рис. 5.2, а, для 1).
Рисунок 5.2 – Гармонические колебания
Рисунок 5.3 – Периодические колебания
Рисунок 5.4 – Квазипериодические колебания Очевидно, решение (5.12) непрерывно зависит от начальных условий,
т.е. малое изменение величин y 0 ,y 0 приводит к равномерно малому

изменению решения y t на всей временной полуоси 0 t . Частотный спектр функции (5.12) дискретен и состоит из одной точки  2 (рис. 5.2, б).
2 (рис. 5.2, б).
Для описания колебаний более сложной формы можно соединять модели вида (5.11) с различными частотами колебаний 1, , r . Например, последовательное соединение двух моделей вида (5.11) описывается соотношениями
|
2 |
t 0, |
y1 t 1 y1 |
||
|
2 |
|
y2 t 2 y2 t y1 t , |
||
и имеет частные решения вида |
|
y2 t A1 sin 1t A2 sin 2t, где |
коэффициенты A1,A2 зависят от начальных условий. Если частоты 1, , r
соизмеримы (являются целыми кратными некоторой частоты 0), то
колебания будут периодическими с периодом |
2 (рис. 5.3 |
для |
r 3, |
|
1 1, |
2 2, 3 4). Если же частоты i |
несоизмеримы, |
то |
такие |
колебания не являются периодическими; они относятся к классу квазипериодических (рис. 5.4, где r 2, 1 1, 2 5 ). В обоих случаях решение непрерывно зависит от начальных условий, а его спектр является дискретным конечным множеством.
). В обоих случаях решение непрерывно зависит от начальных условий, а его спектр является дискретным конечным множеством.
Заметим, что «на глаз» различить периодические и квазипериодические колебания может быть затруднительно, поскольку реальные измерения (в том числе измерение частоты колебаний) выполняются с конечной точностью и отличить рациональное отношение частот от иррационального оказывается практически невозможным.
На рубеже XIX-ХХ веков выяснилось, что линейных моделей колебаний недостаточно для описания новых явлений и процессов в физике и технике. Важнейшим в теории нелинейных колебаний является понятие устойчивого предельного цикла – периодической траектории, к которой сходятся все другие траектории (но крайней мере, траектории с близкими начальными условиями).
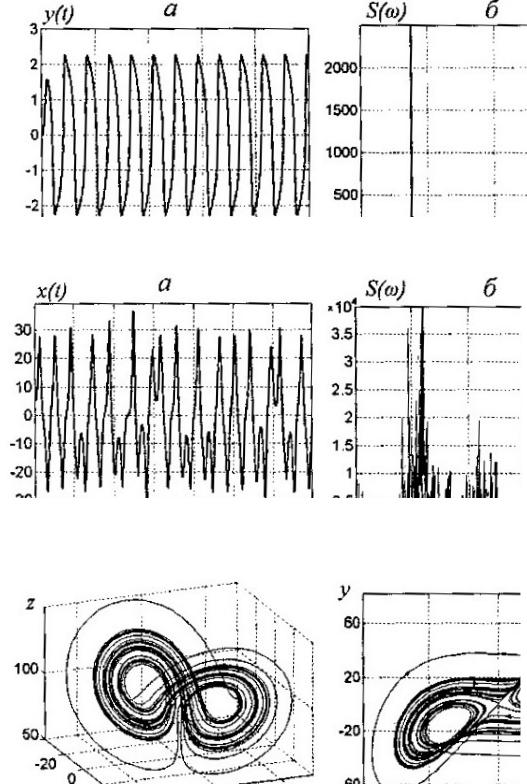
Рисунок 5.5 – Предельный цикл и его спектр
Рисунок 5.6 – Хаотический процесс в системе Лоренца и его спектр
Рисунок 5.7 – Хаотический аттрактор в системе Лоренца К числу классических примеров нелинейных дифференциальных
моделей, обладающих предельным циклом, относятся уравнение Ван дер Поля
y y2 1 y 2 y 0, |
(5.13) |

где 0; уравнение Дуффинга
|
y py qy q0 y3 0 |
(5.14) |
|
где p 0, q 0, q0 |
0; система с релейным элементом |
(5.15) |
|
|
y py qy sign y 0. |
||
|
|
|
|
Даже простые нелинейные модели позволяют описывать колебания сложной формы, например релаксационные (близкие к прямоугольным) колебания, учитывать изменение формы колебания в зависимости от начальных условий (системы с несколькими предельными циклами) и т.д. Теоремы о разложении периодической функции в ряд Фурье показывают, что спектр предельного цикла состоит из счетного набора частот, кратных некоторой основной частоте. На рис. 5.5, а приведен график решения системы (5.13) при 2.5, 1 и начальных условиях y 0 0.5, y 0 0. Соответствующий спектр изображен на рис. 5.5, б.
В течение нескольких десятилетий линейные модели колебаний и нелинейные модели с предельными циклами удовлетворяли потребности инженеров. Считалось, что они описывают все возможные типы колебаний детерминированных систем. Однако в середине ХХ века сами математики обнаружили, что уже для систем третьего порядка это не так: в системе становятся возможными весьма сложные движения – ограниченные непериодические колебания. Настоящий переворот начался с работы физика Е. Лоренца, опубликованной в 1963 г., где было показано, что качественный характер явлений атмосферной турбулентности, описываемых сложными уравнениями в частных производных Навье-Стокса, может быть передан простой нелинейной моделью третьего порядка (уравнение Лоренца):
|
|
x y x , |
|
|
|
|
|
|
|
|
|
|
rx y xz, |
(5.16) |
|
|
y |
||
|
|
|
bz xy. |
|
|
|
z |
|
|
Решения системы (5.16) при некоторых |
значениях параметров |
|||
(например, при 10, |
r 97, |
b 8 3 выглядят как нерегулярные колебания |
||
(рис. 5.6, а, где изображен график x t ). Траектории в пространстве состояний (фазовом пространстве) могут приближаться к предельному множеству (аттрактору), имеющему весьма причудливое строение (рис. 5.7, а). Внимание многих физиков и математиков, а затем и инженеров к подобным моделям было привлечено после работы Д. Рюэля и Ф. Такенса, опубликованной в 1971 г., которые назвали такие аттракторы «странными», а также работы Т. Ли и Дж. Йорке (1975), которые ввели термин «хаос» для обозначения подобных нерегулярных явлений в детерминированных системах. Разработанные новые методы аналитического и численного исследования систем показали, что хаос – это отнюдь не исключительный вид поведения нелинейной системы. Грубо говоря, хаотические движения возникают, когда траектории системы глобально ограничены и локально неустойчивы. В хаотической системе сколь угодно малое начальное расхождение траекторий не остается малым, а в течение некоторого времени растет экспоненциально. Частотный спектр хаотической траектории является непрерывным (рис. 5.6, б, где изображен спектр функции x t ). Во многих случаях подобные нерегулярные, непериодические колебания лучше отражают свойства процессов, протекающих в реальных системах. Опятьтаки следует отметить, что «на глаз» отличить хаотический процесс от квазипериодического может быть не менее трудно, чем отличить квазипериодический процесс от периодического.