Материал: Лекция 33 Пуск и торможение ДПТ, специальные МПТ
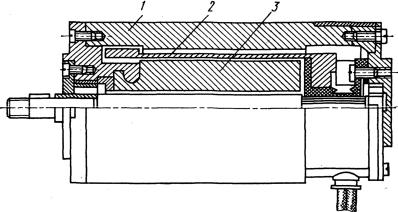
Рис. 6.5. Малоинерционный исполнительный двигатель постоянного тока серии ДПР: 1 – корпус (станина); 2 – полый якорь с обычной обмоткой; 3 – постоянный магнит
Малоинерционным двигателям с обычной обмоткой якоря присущи в основном те же положительные (за исключением п. 8 и частично п. 1) и те же отрицательные (за исключением п. 3) качества, что и рассмотренным ранее малоинерционным двигателям с печатной обмоткой якоря.
Была разработана и внедрена в промышленность серия ДПР – малоинерционных исполнительных двигателей с полыми цилиндрическими якорями, имеющими обычную обмотку (рис. 6.5). В двигателях этой серии магнит размещен внутри якоря. Это позволило значительно сократить потоки рассеяния магнита и лучше его использовать. Корпус двигателя одновременно служит и его магнитопроводом.
Серия ДПР охватывает диапазон мощностей от 0,12 до 37 Вт. Коэффициент полезного действия двигателей серии ДПР на 15..25 % выше, чем у аналогичных двигателей серии ДПМ, имеющих якорь обычной конструкции. Электромеханические постоянные времени двигателей серии ДПР в 2..2,5 раза меньше, чем у двигателей серии ДПМ; они лежат в пределах от 15 до 20 мс.
Тахогенераторы. Они представляют собой маломощные электрические генераторы (обычно до Pн 10..50 Вт), которые служат в системах автоматики для преобразования скорости вращения в электрический сигнал (напряжение Uс ). От тахогенераторов требуется линейная зависимость Uс f n с точностью до 0,2..0,5 %, а иногда с
точностью до 0,01 %. В маломощных тахогенераторах при n 1000 об/мин напряжение Uс 3..5 В, а в более мощных тахогенераторах обычного применения при такой же скорости вращения Uс 50..100 В. Большинство тахогенераторов имеет обычную конструкцию машин постоянного тока с независимым возбуждением при iв const или с
постоянными магнитами. При необходимости уменьшения механической инерции и устранения зубцовых пульсаций напряжения применяют конструкцию с полым якорем.
Uy
Rø
ПО 1
I1
|
|
|
Электромашинные |
усили- |
|
ОУ |
iy |
тели (ЭМУ) поперечного поля. |
|||
Они являются самыми распро- |
|||||
|
|
|
страненными ЭМУ и были раз- |
||
|
|
работаны фирмой |
«Дженерал |
||
КО |
|
I2 |
электрик» (США) в 1937 г. под |
||
|
|
названием «амплидин». Такие |
|||
|
|
|
ЭМУ изготовляются |
обычно с |
|
|
|
U2 |
неявно выраженными полюсами |
||
|
|
и с 2p 2. Они выпускаются |
|||
1 |
1 |
серийно. |
|
|
|
|
y |
|
|
||
|
|
Рассматриваемый |
вид |
||
|
|
I2 |
ЭМУ является конструктивным |
||
2развитием генератора поперечного поля и по принципу дейст-
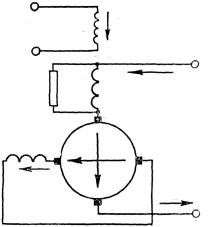
Рис. 6.6. Схема ЭМУ с поперечным |
вия аналогичен ему. |
полем |
Обмотки управления ОУ |
|
(рис. 6.6) создают первоначаль- |
ный поток y по продольной оси. Этот поток индуктирует ЭДС, ко-
торая вызывает ток I1 k1 y в короткозамкнутой цепи якоря (щетки
1–1). Ток I1, протекая по обмотке якоря и поперечной подмагничи-
вающей обмотке ПО, создает поток 1 kI1 поперечного поля. Поток
1 индуктирует ЭДС в выходной цепи (щетки 2–2), в результате чего в цепи нагрузки возникает ток I2 Iвых и на выходных зажимах – напряжение U2 Uвых .

|
Продольная |
размагничи- |
|
|||
вающая МДС тока I2 |
практиче- |
|
||||
ски полностью компенсируется |
|
|||||
с помощью |
компенсационной |
|
||||
обмотки КО, чтобы снизить |
|
|||||
мощность управления и увели- |
1 |
|||||
чить |
коэффициент |
усиления. |
||||
Если |
действие |
КО |
|
является |
y |
|
слишком сильным, то возникает |
||||||
опасность |
самовозбуждения |
|
||||
ЭМУ как генератора последова- |
|
|||||
тельного возбуждения, в резуль- |
|
|||||
тате |
чего нормальная |
работа |
|
|||
ЭМУ нарушается. Обычно КО |
Рис. 6.7. Форма вырубок листов |
|||||
выполняется с некоторым запа- |
стали статора ЭМУ с поперечным |
|||||
сом (перекомпенсация) и регу- |
полем и размещение обмоток стато- |
|||||
лирование (ослабление) ее дей- |
ра 1 – обмотки управления; 2 – по- |
|||||
ствия производится с помощью |
перечная подмагничивающая об- |
|||||
шунтирующего |
сопротивления |
мотка; 3 – компенсационная обмот- |
||||
Rш (рис. 6.6). |
|
|
|
|
ка; 4 – обмотка добавочных полю- |
|
|
Форма |
вырубок |
листов, |
сов выходной цепи |
||
стали статора ЭМУ и расположение обмоток статора показаны на рис. 6.7. Компенсационную обмотку, с целью достижения компенсации реакции якоря не только по величине, но и по форме, выполняют распределенной. Обмотка якоря обычно имеет небольшое укорочение шага. Применение поперечной подмагничивающей обмотки ПО позволяет уменьшить величину тока I1 и улучшить тем самым коммута-
цию щеток 1–1 (см. рис. 6.6). Поэтому добавочных полюсов в поперечной оси обычно не делают. Коммутация щеток 2–2 улучшается с помощью добавочных полюсов.
Коммутация щеток 2–2 улучшается с помощью добавочных полюсов (рис. 6.7).
Для уменьшения влияния гистерезиса вокруг спинки сердечника статора наматывают размагничивающую обмотку, питаемую переменным током. Поток этой обмотки замыкается в сердечнике статора по окружности и не проникает в якорь. Ширина петли гистерезиса при таком размагничивании сужается. На рис. 6.7 эта обмотка не показана.
Двухступенчатые ЭМУ поперечного поля обычно имеют мощность до Pн 20 кВт и коэффициент усиления до ky 10000. По-
строены также многополюсные ЭМУ с сильной поперечной подмагни-
чивающей обмоткой и добавочными полюсами для улучшения коммутации щеток 1–1 мощностью до Pн 100 кВт.
Существуют также некоторые другие, менее распространенные типы ЭМУ.