Материал: Лекция 33 Пуск и торможение ДПТ, специальные МПТ
n
|
Rд.т.3 Rд.т.2 |
Rд.т |
Rд.т.2 Rд.т.1 |
|
Rд.т.1 0 |
а |
Ia( M) |
б |
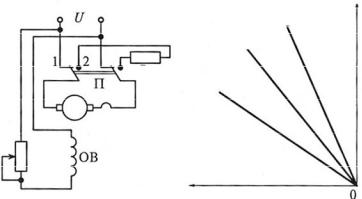
Рис. 5.27. Схема динамического торможения (а) и механические (скоростные) характеристики (б) двигателя параллельного (независимого) возбуждения в данном режиме
Обмотка параллельного (независимого) возбуждения на все время торможения остается включенной в сеть, и якорь по инерции будет продолжать вращаться в том же направлении. Поэтому ЭДС в обмотке якоря не изменяет свой знак. Ток якоря в исходном (двигательном) режиме был равен Ia U E / Ra . После отключения якоря от сети
U 0 и замыкании его на активное сопротивление |
Rдт ток будет |
|||||||
равен |
|
|
|
|
|
|
||
Ia |
E |
|
|
c1n |
|
. |
|
|
Ra Rдт |
Ra Rдт |
|
||||||
|
|
|
|
|
||||
Тогда электромагнитный момент будет равен |
|
|||||||
|
|
|
|
cc n 2 |
|
|
|
|
|
M cIa |
1 |
. |
|
(5.18) |
|||
|
|
Ra Rдт |
|
|||||
|
|
|
|
|
|
|
||
Как видно из выражения (5.18) электромагнитный момент M изменяет свой знак, т.е. становится тормозным. Выбор величины сопротивления Rдт определяется ограничениями на величину тока яко-
ря. Если пренебречь размагничивающим действием реакции якоря, то из этого выражения следует, что механические характеристики двигателя в режиме динамического торможения будут линейными и будут выходить из начала координат (см. рис. 5.27, б).
Недостатком этого способа торможения является то, что при малых частотах вращения машина не развивает достаточного тормозного момента.
Рекуперативное торможение. Рекуперативное торможение будет происходить в том случае, когда у двигателя, подключенного к сети с напряжением U , скорость n превысит скорость идеального
холостого хода nou . При этом ЭДС обмотки якоря E станет больше
напряжения U ток в якоре изменит свое направление. Машина перейдет в генераторный режим работы параллельно с сетью и будет создавать тормозной момент.
В этом режиме кинетическая энергия привода преобразуется в электрическую энергию, отдаваемую генератором постоянного тока в сеть. Этот способ торможения служит не для остановки привода, а для его подтормаживания, что характерно для работы подъемных устройств при спуске груза и для электрического транспорта при движении под уклон.
У двигателей последовательного возбуждения рекуперативное торможение осуществить невозможно, так как у них скорость идеального холостого хода равна бесконечности и, следовательно, ЭДС не может быть больше приложенного напряжения. Если все же необходимо осуществить рекуперативное торможение, то обмотку возбуждения переключают на питание от отдельного источника по схеме независимого возбуждения.
Торможение противовключением. Схема перевода двигателя в режим противовключения показана на рис. 5.28, a .
|
Rпр |
n |
|
|
|
|
|
Rпр 0 |
|
|
Ia(M) |
|
|
Rпр 0 |
а |
|
б |
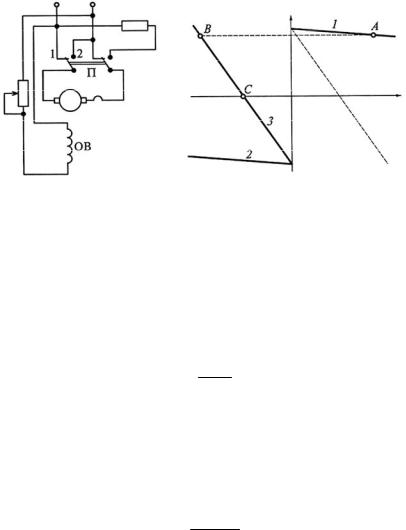
Рис. 5.28. Схема торможения противовключением (а) и три механические (скоростные) характеристики (б) двигателя параллельного (независимого) возбуждения в данном режиме
В исходном состоянии переключатель П находится в положении 1 и подключает цепь якоря к напряжению сети U . Предположим, что двигатель работает в режиме, которому соответствует точка А механической (скоростной) характеристики 1, показанной на рис. 5.28, б. В этой точке частота вращения равна n , а ток якоря
U E Ia Ra .
Для перехода в режим торможения противовключением изменяют полярность подводимого к якорю напряжения (переключатель П из положения 1 переводят в положение 2). После переключения вследствие механической инерции скорость n и ЭДС E не изменяются ни по значению, ни по знаку (направлению). Если сопротивление Rдт 0 , то
ток якоря после переключения станет равным
Ia U E ,
Ra
т.е. примерно вдвое будет превышать ток при прямом пуске двигателя. Для ограничения тока в цепь якоря включают резистор Rпр , как и в
случае реверса, изменением полярности напряжения якоря. Тогда новая механическая характеристика приобретет вид прямой 3 (см. рис.
5.28, б). Прямая 2 – естественная механическая характеристика, соответствующая Rпр 0.
При переводе переключателя из положения 1 в положение 2 машина из точки А переходит на работу в точку В характеристики 3. При переходе в точку В ток якоря изменяет свое направление и создаваемый им момент станет тормозным. Под действием этого момента скорость n будет уменьшаться до полного останова машины (точка С). Если необходимо только остановить двигатель, то в этот момент времени машина должна быть отключена от сети, иначе она перейдет в двигательный режим и якорь начнет разворачиваться в противоположную сторону. Торможение противовключением может применяться для всех типов двигателей постоянного тока.
Специальные машины постоянного тока. Исполнительные двигатели постоянного тока. В схемах автоматики и телемеханики наряду с исполнительными двигателями переменного тока широкое распространение получили исполнительные двигатели постоянного тока.
К положительным качествам этих двигателей, способствующим их широкому применению в различных схемах, можно отнести следующие: они позволяют получать теоретически любые – сколь угодно малые и большие скорости вращения; дают возможность просто, плавно и экономично регулировать скорость вращения в широком диапазоне; устойчиво работают при любых скоростях вращения; имеют линейные механические и в большинстве случаев регулировочные характеристики; не имеют самохода; по габаритам и массе значительно (в 2.. 3 раза) меньше асинхронных исполнительных двигателей переменного тока; обладают значительным пусковым моментом и в ряде конструкций сравнительно небольшой постоянной времени.
Основным недостатком коллекторных двигателей постоянного тока, ограничивающим область их применения, является наличие коллектора и щеток, т.е. скользящих контактов.
Непостоянство переходного сопротивления скользящих контактов приводит к нестабильности характеристик двигателя. Искрение под щетками ведет к подгоранию контактов (коллектора и щеток), к загрязнению двигателя, к необходимости систематического ухода за ним; не позволяет устанавливать двигатели нормального исполнения во взрывоопасных помещениях. Коллектор и щетки, являясь источником радиопомех, требуют для их подавления специальных фильтров.
Усилители постоянного тока, необходимые для работы коллекторных исполнительных двигателей постоянного тока, обычно более
сложны, чем усилители переменного тока, применяемые в схемах с исполнительными двигателями переменного тока.
Коллекторные исполнительные микродвигатели постоянного тока по их конструкции можно разделить на исполнительные двигатели обычного исполнения, исполнительные двигатели с гладким беспазовым якорем и малоинерционные исполнительные двигатели.
Одним из недостатков исполнительных двигателей постоянного тока обычного исполнения, которые были рассмотрены ранее, является то, что они имеют массивный якорь с большим моментом инерции, что значительно снижает их быстродействие. С целью уменьшения электромеханической постоянной времени начали выпускаться малоинерционные исполнительные двигатели постоянного тока.
Малоинерционные двигатели в зависимости от конструкции и технологии изготовления их якоря можно разделить на две группы:
а) малоинерционные двигатели с печатной обмоткой якоря; б) малоинерционные двигатели с обычной обмоткой якоря.
По своим пусковым и рабочим свойствам эти двигатели близки друг к другу.
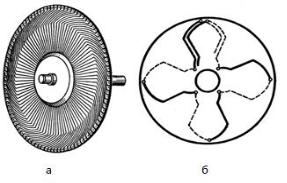
Малоинерционные двигатели с печатной обмоткой якоря. Эти двигатели в настоящее время изготовляются в двух конструктивных вариантах: с дисковым и с цилиндрическим якорем.
Рис. 6.1
Дисковый якорь (рис. 6.1, а) выполняется в виде тонкого диска из изоляционного материала, например стеклотекстолита, на обе стороны которого, обычно электрохимическим путем, наносятся соединяющиеся между собой части плоской (печатной) обмотки. Проводники