Материал: Формирование функциональной математической модели механизма навески трактора Т150К агрегатируемого со свеклоуборочным комбайном КСН-6
Формирование функциональной математической модели механизма навески трактора Т150К агрегатируемого со свеклоуборочным комбайном КСН-6
Министерство образования республики Беларусь
Учреждение образования
Гомельский государственный технический университет имени П.О. Сухого
Кафедра:
«Сельскохозяйственные машины»
КУРСОВАЯ РАБОТА
по курсу
«Математическое моделирование»
на тему:
Формирование
функциональной математической модели механизма навески трактора Т150К
агрегатируемого со свеклоуборочным комбайном КСН-6
Выполнил: Турков С.Н.
студент группы С-31
Проверил:
преп. Попов В.Б.
Гомель 2011
г.
СОДЕРЖАНИЕ
ВВЕДЕНИЕ
. Исходные данные
. Геометрический анализ механизма навески
.кинематический анализ механизма навески
. Силовой анализ механизма навески
ЗАКЛЮЧЕНИЕ
ЛИТЕРАТУРА
ВВЕДЕНИЕ
Математическое моделирование - это средство изучения реального объекта, процесса или системы путем их замены математической моделью, более удобной для экспериментального исследования с помощью ЭВМ.
Математическая модель является приближенным представлением реальных объектов, процессов или систем, выраженным в математических терминах и сохраняющим существенные черты оригинала. Математические модели в количественной форме, с помощью логико-математических конструкций, описывают основные свойства объекта, процесса или системы, его параметры, внутренние и внешние связи. Рассмотрим краткую классификацию математических моделей при проектировании тракторов и с/х машин.
По принципам построения математические модели разделяют на:
аналитические;
имитационные.
В аналитических моделях процессы функционирования реальных объектов, процессов или систем записываются в виде явных функциональных зависимостей.
Аналитическая модель разделяется на типы в зависимости от математической проблемы:
уравнения (алгебраические, трансцендентные, дифференциальные, интегральные),
аппроксимационные задачи (интерполяция, экстраполяция, численное интегрирование и дифференцирование),
задачи оптимизации,
стохастические проблемы.
Однако по мере усложнения объекта моделирования построение аналитической модели превращается в трудноразрешимую проблему. Тогда исследователь вынужден использовать имитационное моделирование.
В имитационном моделировании функционирование объектов, процессов или систем описывается набором алгоритмов. Алгоритмы имитируют реальные элементарные явления, составляющие процесс или систему с сохранением их логической структуры и последовательности протекания во времени.
Имитационное моделирование позволяет по исходным
данным получить сведения о состояниях процесса или системы в определенные
моменты времени, однако прогнозирование поведения объектов, процессов или
систем здесь затруднительно. Можно сказать, что имитационные модели - это
проводимые на ЭВМ вычислительные эксперименты с математическими моделями,
имитирующими поведение реальных объектов, процессов или систем.
. Исходные данные
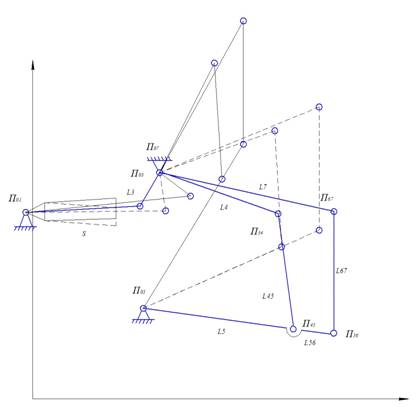
Рисунок 1. Векторная интерпретация механизма
навески трактора
Координаты звеньев в правой системе координат
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Изменение обобщенной координаты (ход гидроцилиндра)
![]()
![]()
![]()
![]()
![]()
![]()
Длины звеньев механизма подъема
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Параметры гидропривода
![]()
![]()
![]()
![]()
![]()
Параметры навесной машины
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Преобразование радиан в градусы
![]()
![]()
Вспомогательные функции
![]()
![]()

![]()
Анализ механизма подъема
. Геометрический анализ механизма навески
Вспомогательные переменные:
![]()
![]()
![]()
![]()
Определение углов yS(S) и y3(S) и координат
точки П23
![]()
![]()
![]()
![]()
![]()
Проверка:
![]()
![]()
Определение угла Y34(S) и координат точки П34 :
![]()
![]()
![]()
![]()
![]()
Подбираем L4
Для нахождения длины звена L4 рассмотрим
положение при наименьшем выдвижении штока гидроцилиндра, т.е. при S = Smin,
учитывая что вертикальная координата точки П56 в данном положении будет ниже
чем вертикальная координата точки П56 в рабочем положении (Y56p) на 10 см
![]()
![]()
![]()
где xm и ym координаты точки П45 при наименьшем
выдвижении штока гидроцилиндра
![]()
![]()
![]()
![]()
Подбираем L7
![]()
Определение углов ![]() 4(S)
и
4(S)
и ![]() 5(S)
, и координат точек П5 и П56 :
5(S)
, и координат точек П5 и П56 :
Вспомогательные переменные
![]()
![]()
![]()
![]()
Угол поворота местной системы координат
относительно основной
![]()
![]()
В местной системе координат:
![]()
Задачу о положении звеньев L4 и L5 будем решать,
используя метод векторных контуров В.А. Зиновьева. Рассмотрим замкнутый контур
П03П34П45П05.

![]()
![]()

![]()
![]()
![]()
![]()
Проверка:
![]()
![]()
Определение углов Y6(S) и Y7(S) , и координат точки П67
Задачу о положении звеньев L6 и L7 будем решать используя метод векторных контуров В.А. Зиновьева. Рассмотрим замкнутый контур П07П67П56П05.
Вспомогательные переменные:
![]()
![]()
![]()
![]()
![]()
Проверка:
![]()
![]()
Определение длинны звена S в рабочем положении
![]()
![]()
Подбираем значение Sp в зависимости от Y56p
= 0,583
![]()
![]()
![]()
Определение угла yS , координат точки S6 и длины
вектора LS6 :
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Результаты геометрического анализа:
Углы звеньев навески:
Координаты точек звеньев навески