Материал: Элтех-экзамен
22. Внешн хар-ки трансформатора. Потери мощности и кпд.
Внешн хар-ка – зависимость напряжен u2 от тока I2
 при
u1,f,
при
u1,f,
 = const.
;
= const.
;
 – коэф мощности.
– коэф мощности.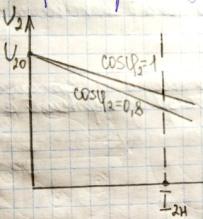
Напряж на вторичн обмотке снижается из-за паден напряж ∆U2 на активных и индуктив (r1,r2,x1,x2) сопротивл обмоток.
При актив-индуктивн
нагрузке напряжен падает быстрее.
∆U2= 2-5 %
Активная мощность, потребляемая от источника:
 .
Часть этой мощности теряется в кач-ве
электрич потерь в первичной обмотке.
.
Часть этой мощности теряется в кач-ве
электрич потерь в первичной обмотке.
 .
.
Др часть теряется в виде магн потерь в сердечнике
 .
Оставшаяся мощн электромагнитн путем
передается вторичной обмотке.
.
Оставшаяся мощн электромагнитн путем
передается вторичной обмотке.
 .
Часть этой мощн теряется в виде
электрических потерь во вторичной
обмотке.
.
Часть этой мощн теряется в виде
электрических потерь во вторичной
обмотке.
 .Полезная
отдаваемая мощность нагрузки:
.Полезная
отдаваемая мощность нагрузки:
 ;
;
 .
.
КПД:
 ;
;

23. Асинхр двигатель. Принцип действ и устр-во.
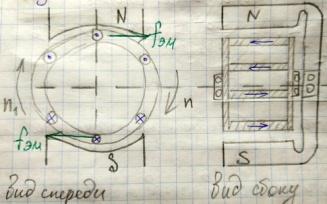
Если вращать магнит с пост частотой n1, его магн поле пересекает стержни ротора и в них индуктир ЭДС (Направлен по правилу правой руки). Кольца и стержни явл-ся проводящими, поэтому в них появятся токи. При взаимод-ии этих токов с вращающимся магн полем возникают электромагн силы. Направлен сил по правилу лев руки. Эти силы создают электромагн момент М, под действ ктрого ротор начнет вращаться. По мере увеличен частоты вращен ротора n относительная скорость движения стержней в магнитн поле будет убывать.
n↑ ↓,
тогда е↓, ток ↓, сила fэм
↓, момент М ↓. Это будет происходить
до тех пор, пока не наступит равновесие
моментов. М=М0, где М0 – момент сопротивл,
обусловл силами трения.
↓,
тогда е↓, ток ↓, сила fэм
↓, момент М ↓. Это будет происходить
до тех пор, пока не наступит равновесие
моментов. М=М0, где М0 – момент сопротивл,
обусловл силами трения.
Частота вращен поля ротора и поля всегда разные.
АД не явл-ся электродвигателем. Режимы работы АД характеризуют скольжением S=(n1-n)/n1.
Двигательный режим: 0<S<1; генераторный режим: S<0; режим электромагн тормоза: S>1.
АД состоит из 2 частей: неподвижн статора и вращ ротора. Они представл собой сердечники, собран из тонких пластин электротехн стали, в пазах ктрых размещаются обмотки. Обмотка статора 3хфазная, размещена на его внутр стороне. Обмотка ротора размещ на его внешней стороне. Обмотка ротора бывает 2х типов: 1) Короткозамкнутый: с обмоткой по типу беличьей клетки 2) Фазный: с 3хфазной обмоткой, соедин звездой, свободн концы этой обмотки присоедин к 3м контактным кольцам, на кольца накладываются неподвижн щетки, к ктрым присоедин пусковой или регулировочн реостат.
24. Энергетич диаграмма ад.
 .
Часть теряется в виде эл потерь в обмотке
статора.{ Индекс: 1 –статор, 2 – ротор.}
.
Часть теряется в виде эл потерь в обмотке
статора.{ Индекс: 1 –статор, 2 – ротор.}

Другая
часть теряется в виде магнитн потерь
в сердечнике статора:
 .
Оставшаяся мощн электромагн путем
передается ротору.
.
Оставшаяся мощн электромагн путем
передается ротору.
 .
Часть этой мощности теряется в виде эл
потерь в обмотке ротора
.
Часть этой мощности теряется в виде эл
потерь в обмотке ротора
 .
Магнитн потери в сердечнике ротора
.
Магнитн потери в сердечнике ротора
 .
Оставшаяся мощн превращается в
механическую:
.
Оставшаяся мощн превращается в
механическую:
 .
.
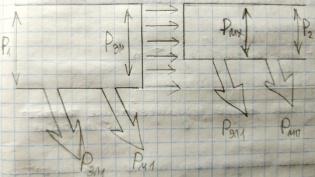
Полезн
мощн на валу: Р2=
 ,
где
,
где
 - механические потери.
- механические потери.
 ,
,
25. Электромагнитный момент и механическая характеристика ад.
 – ф-ла
Квосса, где S
– скольжение.
– ф-ла
Квосса, где S
– скольжение.
n=f(M) – механич характеристика; n=n1(1-S)
тчка1 – пуск АД:n=0; S=1; M=Mпуск
тчка2 – тчка максимального момента: M=Mmax=Mk; S=Sk
тчка3 – номинальный режим: n=nн; S=Sн=0.02-0.08
M=Mн= =
= = 9.55*
= 9.55*

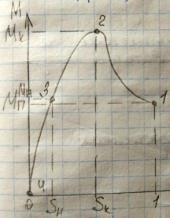
тч4 – идеальн холостой ход: М=0; n=n1; S=0.
Участок от 4 до 3 – рабоч режим. От 3 до 2 – перегрузка. От 2 до 1 – нейустойчив работа.
26. Способы пуска ад.
1.
Прямой пуск (обмотка статора напрямую
подключается к 3хфазной сети)

 -
пусковой ток,
-
пусковой ток,
 – номинальный. Если такой большой ток
отрицательно влияет на работу сети, то
применяют специальные способы.
– номинальный. Если такой большой ток
отрицательно влияет на работу сети, то
применяют специальные способы.
2.Переключ
обмотки статора со звезды на ∆: при
пуске обмотку включ звездой, напряжен
на фазах ↓ в
 раз, а пусковой ток – в 3 раза. Затем
обмотку включают ∆.
раз, а пусковой ток – в 3 раза. Затем
обмотку включают ∆.
3.
Пуск через пусковой реактор: Реактор
– катушки на ферромагнитных сердечниках.
 =>
пуск
при пониженном напряжении.
=>
пуск
при пониженном напряжении.
4. Пуск с автотрансформатором: По мере увеличения оборотов напряжение тоже увеличивают.
Общий недостаток 2,3,4 способов –↓пусковой момент.
5. Пуск АД с фазным ротором: К ротору подключ 3хфазн пусковой реостат, что ↓ ток ротора => ↓ ток статора.
27. Способы регулирован частоты вращ и реверс ад.

1.Изменение числа пар полюсов p: Достигается размещением на статоре независимых обмоток, каждая со своим кол-вом пар полюсов. +: простота, -: многоскоростные двигатели дороже и тяжелее односкоростных.
2.Изменение частоты питающего тока f1: +: самый лучш и эконоимчн способ; -: нужен индивидуальный источник питания (преобразователь частоты).
3.Изменение скольжения S: Этот способ примен для АД с фазным ротором путем подключен к ротору 3хфазн регулировочного реостата.
Реверс: Реверс – изменен направлен движения.
Направлен вращен ротора зависит от направлен вращ магнитн поля статора, а оно зависит от порядка следования фаз. Достаточно помен местами 2 провода.
28. Устр-во и принцип действия машины пост тока.
Предназнач для преобразов энергии пост тока в механ и наоборот, т.е. двигатели и генераторы.
Принцип
действ:
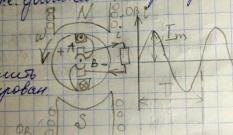
Чтобы выпрямить ток необходимо 2 кольца заменить 1, состоящим из 2х изолированных полуколец, образующих коллектор. При повороте сердечника на 90 ‘ измен направлен ЭДС и тока в проводниках. Одновременно происходит смена полуколец под щетками, поэтому щетка А будет всегда находиться под положительным потенциалом, а щетка В – под отрицат.
Через
нагрузку ток проходит в одном направлен.
У генераторов коллектор явл-ся механич
выпрямителем, а у двигателей – механич
преобразователем.![]()
Устр-во: Неподвижн часть – статор, вращающ – якорь. На статоре расположены главные и добавочные полюса, катушки главн полюсов создают основной магн поток и называются обмоткой возбуждения. Добавочн полюса предназнач для безискровой работы щеток.
29. Способы возбуждения машины пост тока. Потери мощности и кпд.
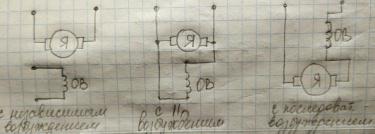
Обмотка возбуждения и якорь по отношен друг к другу включают независимо, ӀӀ, последоват или смешанно.
Ш
- ӀӀ (шунтовая) обмотка, выполн тонким
проводом; С – последоват (сериесная)
обмотка, выполн проводом большего
сечения и меньшим числом витков.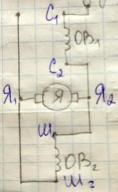
Имеют место след. потери:
1. Электрические – возникают в обмотках возбуждения, обмотках якоря и щеточном контакте.
2. Магнитные – возникают преимущественно в сердечнике якоря.
3. Механические – возникают в подшипниках, щетках (трение), трение о воздух.
 ,
,
30. Пуск, регулирование частоты вращения и реверс двигателей пост тока.
Способы
пуска:
1. Прямой пуск (якорь напрямую подключают
к сети пост тока)
 .
Для мощных двигателей применяют другой
способ.
.
Для мощных двигателей применяют другой
способ.
2. Реостатный: Пусковой реостат в цепи якоря.
Регулир частоты: U=E+Iя*R по 2 з-ну Кирхгофа.
U=Ce*n*Ф+Iя*R,
где
Ce
– коэф, зависящ от конструкции машины.

1.
Изменения падения напряжения в цепи
якоря :
Достигается регулировочным реостатом.
-: из-за потерь в реостате неэкономичен.
:
Достигается регулировочным реостатом.
-: из-за потерь в реостате неэкономичен.
2. Изменение магн потока Ф: Достигается регулировочн реостатом в цепи обмотки возбуждения. +: экономично
3. Изменен напряжения U: самый лучший способ, но нужен индивидуальный источник.
Реверс: Достигается изменением направл тока в якоре или обмотке возбужден. Меняем 2 провода местами.