Материал: discrete_mathematics
5.1.Поняття скінченного автомата. Методи задання автоматів
Скiнченним автоматом (далі – просто автоматом) називають систему
A = (X, Y, U, δ, λ),
у якій X = {x1, x2, …, xm} та Y = {y1, y2, …, yn} – скінченні
жини (алфавіти) відповідно вхідних і вихідних сигналів, U = {a1, a2, …, as} – множина внутрішніх станів автомата. Функ-
ції δ та λ описують алгоритм функціонування (поведінку) автомата A. Функцію δ: U × X → U називають функцією переходів, а
λ: U × X → Y – функцією виходів автомата A.
Необхідно підкреслити одну особливість моделі автомата, яка випливає з її подальшої фізичної інтерпретації. Вважаємо, що автомат A функціонує в дискретному часі, тобто час функціонування автомата розбито на відрізки однакової довжини – та кти. Межи тактів t називають моментами абстрактного дискретного автоматного часу й нумерують натуральними числами, починаючи з одиниці. Значення вхідних і вихідних сигналів та значення станів автомата можуть змінюватися тільки в моменти автоматного часу t = 1, 2, ….
Якщо позначимо через
x(t) X, y(t) Y, a(t) U
значення вхідного й вихідного сигналів і стану автомата в момент автоматного часу t, то робота автомата A описуватиметься співвідношеннями
a(t + 1) = δ(a(t), x(t)), y(t) = λ(a(t), x(t)). (5.1)
Співвідношення (5.1) називають канонічними рівняннями автомата A.
Перше із канонічних рівнянь можна прочитати так: стан автомата A в будь-який момент автоматного часу t + 1 однозначно визначається сигналом, поданим на вхід автомата, і станом автомата A в попередній момент автоматного часу. При цьому кажемо, що автомат A переходить зі стану a(t) у стан a(t + 1).
У математичній моделі автомата можна вважати, що такий перехід відбувається миттєво (стрибкоподібно). За фізичної ін-
201
терпретації розглядуваної моделі слід брати до уваги, що зазначений перехід відбувається поступово й потребує певного фізикного часу. Однак вважатимемо, що цей час завжди менший від тривалості такту введеного дискретного часу; отже, від моменту t до моменту t + 1 весь перехідний процес завершується.
Крім зміни станів, результатом роботи автомата є також видача вихідних сигналів за законом, визначеним другим канонічним рівнянням автомата.
Якщо у автоматі A виділено стан, у якому автомат A перебуває в момент автоматного часу t = 1, то цей стан називають початко вим (зазвичай початковим станом уважають a1), а автомат A називають ініціальним і позначають A/a1. Надалі не вказуватимемо явно залежність змінних і результатів функцій переходів і виходів від автоматного часу t, крім тих випадків, коли це потрібно.
Для розв'язання задач теорії автоматів зручно використовувати різні способи (методи) задання автоматів. Опишемо два найпоширеніші. У цих методах істотним є те, що функції δ та λ автомата A мають скінченні області визначення.
Табличний спосіб. Функції δ і λ можна задавати за допомогою двох таблиць, які називають відповідно
дів і таблицею виходів автомата A. Загальна структура обох таблиць однакова: рядки таблиць позначено вхідними сигналами x1, x2, …, xm, а стовпчики – станами a1, a2, …, as. На перетині i-го рядка та j-го стовпчика в таблиці переходів записують стан δ(aj, xi), а в таблиці виходів – вихідний сигнал λ(aj, xi). Іноді для задання автомата використовують одну
реходів/виходів, у якій на перетині i-го рядка та j-го стовпчика
записують відповідну пару ak /yl, де ak = δ(aj, xi) та yl = λ(aj, xi). Графічний спосіб задання автомата за допомогою орієнтова-
ного мультиграфа називають графом, або діаграмою автомата
(автоматним графом, автоматною діаграмою). Вершини графа позначають символами станів автомата A. Якщо δ(ai, xk) = aj та λ(ai, xk) = yl , то в графі автомата проводять орієнтовану дугу (або стрілку) з вершини ai у вершину aj й позначають її символами xk/yl. Задання автомата за допомогою графа особливо наочне, якщо кількість його станів порівняно невелика.
202
Зрозуміло, що досить легко можна перейти від одного способу задання до іншого.
Автомат A називають детермінованим, якщо функції δ і λ всюди визначені, і недетермінованим, якщо δ і λ – усюди визначені відповідності між U × X і U та U × X та Y, відповідно, але вони не задовольняють умову функціональності. Автомат A називають частковим, якщо функції δ і λ не є всюди визначеними.
Приклад 5.1.
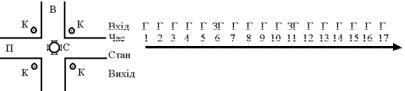
1. Розглянемо автомат D, який регулює дорожній рух на перехресті вулиць В і П.
В автомат дорожнього руху D з періодом одна хвилина надходить тактовий сигнал Г генератора синхроімпульсів, що послідовно перемикає сигнали світлофора С, дозволяючи транспорту рух відповідно вулицями В і П (рис. 5.1, а). Крім світлофора є також кнопка виклику К, за допомогою якої пішохід може надіслати автомату запит З на призупинення руху на перехресті. При надходженні запиту З і по завершенні поточного інтервалу часу в одну хвилину автомат перериває генерування послідовності сигналів В і П на дві хвилини, сигналом Д запалює транспарант, що дозволяє перехід пішоходам, а по вичерпанні двох хвилин формує сигнал скидання СС, повертаючи автомат до відновлення формування послідовності сигналів В та П. Таким чином, автомат D виробляє вихідні сигнали В, П, Д і СС для дозволу руху транспорту по вулицях В і П, дозволу переходу пішоходам та скидання кнопки виклику. Роботу автомата D ілюструє часова діаграма на рис. 5.1, б.
|
|
К |
|
|
|
К |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Г |
Г |
Г |
Г |
Г |
ГЗ Г |
Г |
Г |
Г |
ГЗ |
Г |
Г |
Г |
Г |
Г Г |
|
||||||||
|
|
|
|
|
|
Вхід |
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
Час |
|
|
|
|
||||||||||||||||||||
П |
|
|||||||||||||||||||||||||||||||||
|
|
|
|
С |
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
Стан |
|
|
а1 |
а2 |
а3 |
а4 |
а5 |
а6 |
а7 |
8 |
9 10 |
11 12 13 14 15 1617 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
а |
|
а |
а |
а |
|
а |
|
а |
а |
а |
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
Вихід |
|
1 |
2 |
1 |
2 |
1 |
3 |
4 |
2 |
|
1 |
2 |
5 |
|
6 |
|
1 |
2 |
1 |
2 |
1 |
t |
|||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
К |
|
|
|
К |
|
|
|
|
|
В П В П В Д СС П В П Д СС В П В П В |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 5.1 |
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|||
Таблиці переходів і виходів автомата дорожнього руху мають такий вигляд:
203
δ |
a1 |
a2 |
a3 |
a4 |
a5 |
a6 |
|
λ |
a1 |
a2 |
a3 |
a4 |
a5 |
a6 |
x1 |
a2 |
a1 |
a4 |
a2 |
a6 |
a1 |
|
x1 |
y2 |
y1 |
y4 |
y2 |
y4 |
y1 |
x2 |
a3 |
a5 |
a4 |
a2 |
a6 |
a1 |
|
x2 |
y3 |
y3 |
y4 |
y2 |
y4 |
y1 |
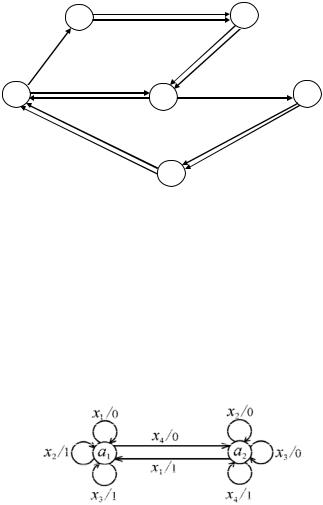
Тут використано позначення:
x1 = Г, x2 = З & Г, y1 = В, y2 = П, y3 = Д, y4 = Д & СС):
Граф автомата дорожнього руху подано на рис. 5.2.
|
|
|
|
|
|
|
|
|
|
|
|
х1/у4 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а4 |
|
|
|
|||||
|
|
|
|
|
|
а3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
х2/у4 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
х2/у3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
х1/у2 |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
х2/у2 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
х1/у2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
а1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а5 |
|||||||||||
|
|
|
|
|
|
|
|
|
а2 |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
х1/у1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
х1/у1 |
|
|
|
|
|
|
х1/у4 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
х2/у1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
а6 |
|
|
|
|
х2/у4 |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рис. 5.2
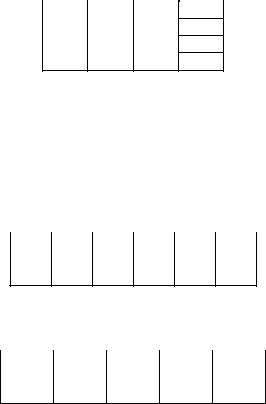
2. Побудуємо автомат S, який описує алгоритм функціонування послідовного двійкового суматора. На вхід автомата надходять пари розрядів двійкових чисел, що додаються, починаючи з молодших розрядів. На виході автомата має з'являтися розряд результату додавання. Потрібно також фіксувати й ураховувати ситуацію наявності чи відсутності перенесення в наступний розряд. Ці дві ситуації відображають два стани автомата S: початковому стану a1 відповідає ситуація немає перенесення, а стану a2 – ситуація є перенесення.
Вхідні сигнали x0 = (0, 0), x1 = (0, 1), x2 = (1, 0) і x3 = (1, 1) за-
дають чотири можливі комбінації розрядів, що додаються. Граф автомата S подано на рис. 5.3.
|
|
|
х1/0 |
|
|
|
|
|
х2/0 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
х4/0 |
|
|
|
|||||||
х2/1 |
|
|
|
|
|
|
|
|
|
|
|
а2 |
|
|
|
|
|
|
|
а1 |
|
|
|
|
|
|
|
|
|
|
|
х3/0 |
|||||
|
|
|
|
|
|
|
|
х1/1 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
х3/1 |
|
|
|
|
|
|
х4/1 |
|
|
Рис. 5.3 |
|||||
|
|
|
|
|
|
|
204 |
|
|
|
|
|
|
|
|
|||
3. Побудуємо суміщену таблицю переходів/виходів автомата A, на виході якого з'являється сигнал 1 тоді й лише тоді, коли на його вхід було подано послідовність символів, що відповідає ідентифікатору якоїсь мови програмування; в іншому разі вихідним сигналом є 0. Вхідні сигнали автомата A: x1 – літера, x2 – цифра, x3 – будь-який інший символ.
П – початковий стан автомата A. Автомат перебуває у стані T, коли на його вхід подається послідовність символів, що відповідає ідентифікатору, в іншому разі він перебуває у стані H.
δ/λ |
П |
T |
H |
x1 |
T/1 |
T/1 |
H/0 |
x2 |
H/0 |
T/1 |
H/0 |
x3 |
H/0 |
H/0 |
H/0 |
4. Побудувати автомат-пошуковець S для X = Y = {0, 1}, на виході якого з'являється сигнал 1 тоді й лише тоді, коли чотири останні вхідні сигнали – це 0110.
Позначимо через 0 стан, що відповідає очікуванню бажаної (шуканої) четвірки символів, через 1 – стан, що фіксує появу на вході автомата першого 0 четвірки, через 2 – стан, що відповідає появі пари 01, через 3 – стан, що відповідає появі 011, і через 4 – стан, у який автомат переходить, коли останніми вхідними сигналами є 0110. Суміщену таблицю переходів/виходів автомата-
пошуковця S наведено нижче: |
|
|
|
|||
|
δ/λ |
0 |
1 |
2 |
3 |
4 |
|
0 |
1/0 |
1/0 |
1/0 |
4/1 |
1/0 |
|
1 |
0/0 |
2/0 |
3/0 |
0/0 |
2/0 |
5. Побудувати таблиці переходів і виходів, граф автомата P, що за допомогою своїх станів запам'ятовує два останні символи (двійкові розряди), які було подано на його вхід. Вихідним сигналом є останній символ, що "забувається".
δ/λ |
00 |
01 |
10 |
11 |
0 |
00/0 |
10/0 |
00/1 |
10/1 |
1 |
01/0 |
11/0 |
01/1 |
11/1 |
Для зручності стани автомата P позначено чотирма можливими варіантами значень двох останніх символів (двійкових розрядів) вхідного слова, тобто автомат P перебуває в стані ab, якщо двома останніми вхідними символами були ab, a, b {0, 1}. ◄
205