Материал: Датчик скорости в современном автомобиле
Датчик скорости в современном автомобиле
Содержание
Введение
. Патентно-аналитический обзор
.1 Патент №2150114
1.2 Патент №2270452
1.3 Патент №2260188
. Техническое задание
3. Основная часть
.1 Датчики и их классификация
3.2 Общие сведения
3.3 Спидометр
.4 Датчик скорости в современном автомобиле
.5 Эффект Холла
Заключение
Список используемой литературы
Реферат
Сандркин Петр Сергеевич
Датчики измерения скорости; Курсовая работа / П.С. Сандркин-Ульяновск: УлГТУ, 2014.-31 с., 8 рис., 1 табл., 8 источников литературы.
В работе представлен патентно-аналитический обзор, классификация датчиков. Рассмотрены основные принципы действия датчиков скорости, а также их применение.
Ключевые слова:
скорость движения
спидометр
бесконтактный датчик
ДСА
эффект Холла
Введение
За последние годы в технике измерения и регулирования параметров различных процессов всё более и более возрастает роль отрасли изготовления и применения датчиков. Эта отрасль, постоянно развиваясь, служит основой создания разнообразных вариантов систем автоматического регулирования.
На сегодняшний день существует большое количество различных датчиков
скорости, предназначенных для работы в разных условиях, с разными входными
параметрами. В основном они бывают контактными или бесконтактными. Несмотря на
то, что предпочтение отдается бесконтактным датчикам, контактные устройства еще
широко применяются. При всех достоинствах, контактные датчики имеют один
существенный недостаток - склонность к загрязнению и, соответственно, снижение
точности измерений.
1. Патентно-аналитический обзор
Был произведен патентно-аналитический обзор в ходе, которого были найдены
несколько патентов затрагивающие данную тему. Результат приведен в таблице 1.1
Таблица 1.1
Регламент поиска
|
№ |
Страна |
Класс |
Источник информации |
Год |
Номер патента |
|
1 |
Россия |
G01P3/48 |
www.freepatent.ru |
2000 |
2150114 |
|
2 |
Россия |
G01P3/488 |
www.freepatent.ru |
2006 |
2270452 |
|
3 |
Россия |
G01P3/488 |
www.freepatent.ru |
2005 |
2260188 |
|
4 |
Россия |
G01P3/50 |
www.freepatent.ru |
2007 |
2307356 |
|
5 |
Россия |
G01P3/48 |
www.freepatent.ru |
1994 |
2018127 |
1.1 Патент №2150114
Изобретение относится к измерительной технике и может быть использовано для измерения скорости вращения, в том числе измерения скорости вращения привода спидометра коробки передач автомобиля, для измерения скорости его движения, а также может быть использовано с различными информационными системами, в частности с маршрутными компьютерами. Сущность предлагаемого изобретения состоит в создании конструкции, приемлемой для различных типов автомобилей и обеспечивающей снижение радиальных нагрузок на опоры со стороны привода спидометра коробки передач.
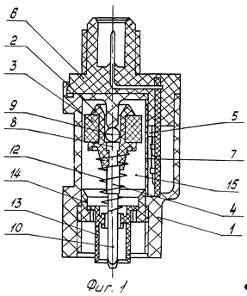
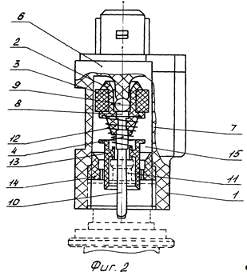
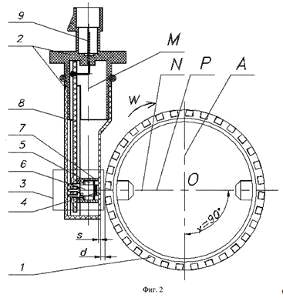
Датчик измерения скорости включает в себя корпус 1, в котором установлен ротор 2 в виде многополюсного магнитного кольца 3, закрепленного на валу 4. Датчик 5 магнитного поля входит в состав формирователя импульсов 6, укреплен в корпусе 1 неподвижно и отделен от многополюсного магнитного кольца 3 герметичной перегородкой 7. Один конец 8 вала 4 ротора 2 укреплен в корпусе 1 на упорном подшипнике 9, роль которого выполняет шарик. Функции опоры другого конца 10 вала 4 ротора 2 выполняет привод 11 спидометра коробки передач (фиг. 2) (показан пунктиром). Между приводом 11 и многополюсным магнитным кольцом 3 размещена пружина сжатия 12. Вне установки датчика измерения скорости привод 11 спидометра коробки передач (фиг. 1) опорой конца 10 вала 4 ротора 2 является втулка 13, установленная подвижно с возможностью перемещения вдоль оси вала 4, а в корпусе 1 закреплен ограничитель ее хода, например, в виде втулки 14.
Причем диаметр части внутренней полости 15 корпуса 1, в которой в рабочем положении находится подвижная втулка 13, больше ее наружного диаметра.
Работает датчик измерения скорости следующим образом:
При присоединении датчика измерения скорости к приводу спидометра 11 коробки передач (фиг. 2) втулка 13 сдвигается во внутреннюю полость 15 корпуса 1, выходя из контакта с ограничителем хода - втулкой 14. Пружина сжатия 12 обеспечивает прижатие конца 8 вала 4 ротора 2 к шарику-упорному подшипнику 9 как в рабочем (фиг. 2), так и в нерабочем (фиг. 1) положении датчика измерения скорости. При этом датчик 5 магнитного поля всегда находится в зоне действия многополюсного магнитного кольца 3.
При вращении ротора 2 конец 8 вала 4 опирается на
шарик-упорный подшипник 9, а его конец 10 имеет некоторую свободу перемещения в
радиальных направлениях, что снимает радиальные нагрузки на вал 4. Втулка 13,
отжатая приводом 11 спидометра коробки передач во внутреннюю полость 15 корпуса
1, вращается вместе с валом 4.
1.2 Патент №2270452
Предлагаемое изобретение датчика скорости автомобиля (ДСА) относится к автомобильному электронному приборостроению и может быть непосредственно использовано как для измерения линейной скорости автомобиля, так и для измерения угловой скорости (частоты вращения) большого числа ферромагнитных зубчатых роторов, линейных и угловых перемещений (положений) других зубчатых механизмов и вращающихся валов в автомобильной, легкой и тяжелой промышленности.
Данный датчик иллюстрируется чертежами: фиг 1.
(основное исполнение ДСА) и фиг.2 (исполнение, содержащее некоторые конструктивные
варианты)
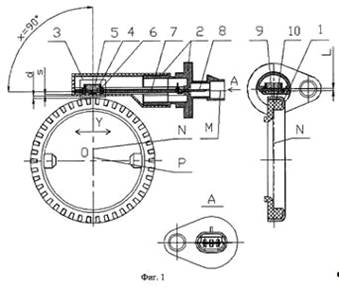
Устройство состоит из ферромагнитного зубчатого ротора 1, корпуса бесконтактного датчика 2, магниточувствительного элемента 3 на основе дифференциальной ИС гигантского магниторезистора 4 и аксиально намагниченного постоянного магнита 5 обратного смещения, из ферритового материала (типа Ceramic 8) или материала типа Алнико (Alnico 8), печатной платы 7, контактов 8. Магнит 5, центрированный относительно оси симметрии N ИС 4, жестко установлен вдоль своей оси легкой намагниченности перпендикулярно плоскости, образованной вращением чувствительной оси Y в плане ИС 4, на расстоянии L от поверхности установки ИС 4 на плате 7 (запрессован и вклеен в пластмассовом корпусе 6, оплавленном на плате 7 со стороны ИС 4 (фиг.1), или в специальном пазе платы 7, как показано на фиг.2). Выводы ИС 4 запаяны на плате 7 способом поверхностного монтажа, контакты 8 запрессованы в корпусе 2 и запаяны на плате 7.
Конструкция и малые геометрические размеры заявляемого ДСА допускают расположение магниточувствительного элемента 3 на плате 7, симметричное относительно оси N, коаксиально любой заданной диаметральной оси ОР ротора 1, под любым углом х=0÷90° относительно оси симметрии М корпуса 2 ДСА.
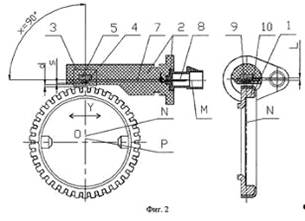
Технология изготовления ДСА допускает как поэтапную
сборку механических компонентов в одну или несколько механических частей
корпуса 2 ДСА, как в ДСА, показанных на фиг.1, так и применение технологии
обливки пластмассой электронного блока с выполненными электрическими
соединениями (фиг.2).
1.3 Патент №2260188
Данное изобретение датчика скорости автомобиля (ДСА) относится к автомобильному электронному приборостроению и может быть непосредственно использовано как для измерения линейной скорости автомобиля, так и для измерения угловой скорости (частоты вращения) большого числа ферромагнитных зубчатых роторов, линейных и угловых перемещений (положений) других зубчатых механизмов и вращающихся валов в автомобильной, легкой и тяжелой промышленности.
ДСА иллюстрируется следующими чертежами: фиг.1
(аксиальное исполнение) и фиг.2 (пример радиального исполнения):
ДСА состоит из ферромагнитного зубчатого ротора 1, корпуса бесконтактного датчика 2, магниточувствительного элемента 3, включающего ИС магниторезистора 4, постоянный магнит 5 для обратного смещения и стабилизации магниторезистивного эффекта, ИС 6 обработки сигнала магниторезистивного элемента, образующих интегральный магниторезистивный модуль, заключенный в пластмассовый корпус 7, печатной платы 8, контактов 9. Выводы ИС 6 запаяны на плате 8, корпус 7 жестко установлен (оплавлен) на плате 8. Контакты 9 запрессованы в корпусе 2 и запаяны на плате 8.
Интегральный магниторезистивный модуль 3 жестко
установлен в пластмассовом корпусе 7 (запрессован и вклеен) симметрично его оси
симметрии ON, перпендикулярной плоскости чувствительного элемента ИС 4
магниторезистора, коаксиально диаметральной оси ОР ротора 1, соответствующей на
фиг.1, 2 разделению между зубом и слотом ротора 1, с оптимальным углом х
симметричной вдоль оси ON установки магниторезистивного модуля 3 относительно оси
М симметрии корпуса 2 ДСА от х=0° (соответствует аксиальному исполнению ДСА,
когда ось М коаксиальна оси ОА) до х=90° (радиальное исполнение ДСА, когда ось
М не коаксиальна ни одной оси ОА), который обеспечивается конструктивно
геометрией корпуса 7, корпуса 2, ротора 1. Расположение платы 8 относительно
оси симметрии М ДСА определяется геометрией корпуса 2, требованиями к
механическим размерам контактов 9, существующими технологическими решениями для
размещения элементов электронной схемы обработки сигнала ДСА. (На фиг.1
показаны два возможных варианта размещения платы 8 для аксиального исполнения
корпуса 2 ДСА).
2. Техническое задание
.Проведение патентно-аналитического обзора по теме «Объект исследования - датчики измерения скорости»
.Изучение научно-технической и производственной литературы для составления аналитического обзора
.Выводы по проведенным исследованиям
3. Основная часть
.1 Датчики и их классификация
Датчик - это преобразователь измеряемой (контролируемой) физической величины в величину, удобную для дальнейшего преобразования или измерения. Датчик является обязательным элементом измерительных приборов, систем контроля и регулирования и т.п. Собственно, без датчиков невозможны ни измерение, ни контроль, ни регулирование.
Для построения датчиков используется значительное (более 500) количество физических эффектов (принципов). Развитие, совершенствование датчиков в значительной степени определяется достижениями в области физики, химии, физической химии, механики, радиотехники и других наук. Особое место в развитии датчиков занимают достижения и возможности современных технологий. Принципы действия датчиков могут быть самыми разноообразными в зависимости от физической природы измеряемой величины, ее абсолютного значения, требуемой точности преобразования и т.п. Однако в подавляющем большинстве случаев преобразование входных физических величин в соответствующие выходные сигналы связано с преобразованием энергии, в том числе преобразованием энергии одного вида в другой. Энергетическое представление принципа работы измерительных преобразователей, базирующееся на двух фундаментальных законах - законе сохранения энергии и принципе обратимости, стало предпосылкой для создания основ общей теории измерительных преобразователей и их представления в виде пассивных четырехполюсников со сторонами разной физической природы.
Для потребителей датчиков важна информация о датчиках, предназначенных для измерения определенных физических величин (ФВ), сведениях о выходных и входных параметрах и сигналах, технических и метрологических характеристиках. Такой подход требует построения классификационной схемы по видам физической величины.
Для разработчиков датчиков, студентов, специалистов, изучающих работу датчиков, важна информация о физических принципах их действия или, точнее, физических закономерностях, определяющих принцип их действия.
По видам входных и выходных величин измерительные преобразователи (датчики) можно разделить на 4 больших класса:
• электрических величин в электрические, например, непрерывных во времени (аналоговых) в прерывистые (дискретные, цифровые);
• неэлектрических величин в неэлектрические, например, давление в перемещение жесткого центра мембраны;
• электрических величин в неэлектрические, например, тока в отклонение стрелки прибора;
• неэлектрических величин в электрические.
Важнейшим классификационным признаком для датчиков является физический принцип действия - принцип преобразования физических величин, который основывается на некотором физико-техническом (физическом, электрохимическом, биоэлектронном, химическом и т.д.) эффекте (явлении).
Кроме того, можно классифицировать датчики по виду измеряемых неэлектрических величин и электрических величин.
По физическому принципу действия датчики (преобразователи) могут быть физическими (электрические, магнитные, тепловые, оптические, акустические и т.п.), химическими и комбинированными (физико-химические, электрохимические, биоэлектрические и т.п.). Принцип действия датчика определяется прежде всего тем, какая закономерность используется в нем. Однако существуют датчики, которые не относятся ни к одному из перечисленных классов, например, механоэлектрические. Эти датчики называются комбинированными.
По виду выходной величины и необходимости внешнего источника энергии датчики можно разделить на генераторные (активные), выходной величиной которых являются электрические величины (напряжение, заряд, ток, электродвижущая сила (ЭДС), и параметрические (пассивные), выходной величиной которых является сопротивление, индуктивность, емкость, диэлектрическая или магнитная проницаемость и т.п.
В генераторных датчиках внешний источник энергии не нужен. Например, в пьезоэлектрическом датчике под действием измеряемого усилия на электродах пьезоэлемента возникает электрический заряд (или электрическое напряжение).
В параметрических датчиках под действием измеряемой физической величины меняется какой-либо из параметров (например, электрическое сопротивление в тензорезисторах). Для получения выходного электрического сигнала требуется источник энергии (тока или напряжения). Таким образом, датчики могут иметь (или не иметь) вспомогательный источник энергии.
По функциональному назначению датчики (преобразователи) можно разделить на:
индикаторные (метрологические характеристики не нормируются). Датчик выдает информацию о наличии или отсутствии физической величины;
измерительные (метрологические характеристики нормируются);
комбинированные.
По методу преобразования физической величины датчики (преобразователи) делятся на: