Материал: Д5761=2 Батяев АА Новотельнова АВ электрические машины и электропривод Ч2 Метод указ лаб раб все
а синхронная скорость
n1 = 60 f/p = 3000/3 = 1000 об/мин.
4. Пробный запуск диагностируемого электродвигателя.
Пробный запуск преследует решение следующих задач:
– проверка правильности монтажа обмоток электродвигателя (звезда или треугольник) в соответствии с величиной напряжения, принятой в лабораторной установке;
– проверка разбега двигателя до частоты вращения, близкой к синхронной n1, и оценка тока холостого хода (до 30 % от номинального Iн).
Для запуска электродвигателя собирается схема в соответствии с рис. 5.
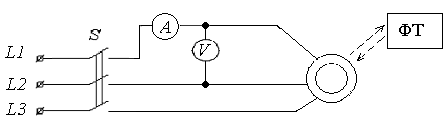
Рис. 5. Схема проведения опыта пробного включения двигателя на холостом ходу
После включения выключателя S убедиться в нормальной работе двигателя, для чего:
– с помощью тахометра ИТ5-Ч измерить частоту вращения ротора;
– измерить ток холостого хода.
Измерение частоты вращения осуществляется настройкой тахометра на метку, закрепленную на валу ротора. Расстояние от излучателя тахометра до метки не должно превышать 200 мм. Включение (отключение) тахометра производится кратковременным нажатием боковой кнопки. При этом на цифровом дисплее появляется буква F и загораются индикаторные светодиоды красного и зеленого цветов. Плавно ориентируя излучатель тахометра по отношению к вращающейся метке, добиться одновременного свечения светодиодов: красного – непрерывно, а зеленого – с периодическим миганием. При этом на дисплее отображается частота вращения в оборотах в минуту (об/мин). Показания тахометра и амперметра занести в табл. 2.
Таблица 2
|
Расчетные величины |
Опытные величины |
||
|
I, А |
n1, об/мин |
I, А |
n2, об/мин |
|
|
|
|
|
5. Предъявить результаты опытов преподавателю и с его разрешения разобрать схему и привести рабочее место в исходное состояние.
Содержание отчета
1. Методика определения парных концов фазных обмоток асинхронного двигателя (АД).
2. Схемы и описание опытов по определению начал и концов фаз обмоток статора АД.
3. Схема и результаты пробного включения АД на холостом ходу.
Контрольные вопросы при допуске к лабораторной работе
1. Цель и программа работы.
2. С какой целью производят диагностику асинхронных двигателей?
3. Как обозначаются начала и концы обмоток статора в соответствии с ГОСТ 26772–85?
4. Как маркируются начала и концы обмоток статора?
5. Как определить число фиктивных магнитных полюсов статора?
6. Как осуществляется проверка маркировок выводов обмотки статора с помощью источника переменного тока?
7. Как производится проверка маркировок выводов обмотки статора с помощью источника постоянного тока?
8. С какой целью производится опыт пробного включения двигателя на холостом ходу?
Лабораторная работа № 15а изучение принципа действия и основных характеристик преобразователя частоты для питания асинхронного двигателя Цель работы
1. Изучить устройство и назначение основных элементов схемы частотного преобразователя.
2. Приобрести практические навыки по использованию частотного преобразователя в регулируемом электроприводе.
3. Изучить методику определения частотных характеристик преобразователя частоты (ПЧ).
4. Экспериментально подтвердить теоретические знания, полученные на лекциях и практических занятиях.
Общие сведения
В настоящее время для регулирования производительности технологических механизмов широкое распространение получил управляемый асинхронный электропривод, основанный на частотном регулировании скорости асинхронных электродвигателей (АД).
При реализации этого способа управления используется зависимость синхронной скорости n1 (скорости вращения магнитного поля статора) от частоты источника питания fп:
![]() ,
,
где р – число пар фиктивных полюсов.
Частота вращения ротора двигателя не совпадает с частотой вращения магнитного поля. Она всегда несколько меньше и определяется выражением
n = n1 (1 – s),
где s – скольжение.
Скольжение зависит от нагрузки на двигатель. При увеличении нагрузки скольжение также увеличивается, однако величина его в диапазоне рабочих нагрузок остается малой. При номинальном моменте скольжение составляет s = 0,03–0,12.
Чтобы изменить частоту вращения асинхронного двигателя, изменяют частоту напряжения fп, питающего его статорные обмотки.
Для регулирования частоты в современном электроприводе широко применяют преобразователи частоты (ПЧ), которые преобразуют переменный ток с постоянными значениями Uc, fc в переменный ток с регулируемыми значениями Uп, fп.
В том случае, если напряжение меняется прямо пропорционально частоте (магнитный поток остается примерно постоянным), регулировочные характеристики выглядят так, как это показано на рис. 1, а. При этом критический (максимальный) момент Мк остается неизменным. Если напряжение изменяется незначительно, то характеристики имеют вид, представленный на рис. 1, б. Тогда критический момент изменяется, но остается примерно постоянной мощность.
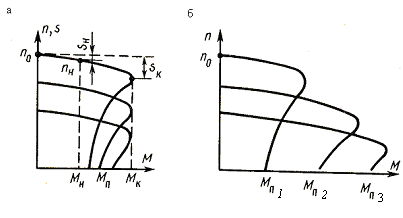
Рис.1. Механические характеристики АД при разных способах регулирования частоты:
а – при регулировании с постоянным моментом; б – при регулировании с постоянной мощностью; Мн, nн, sн – номинальные момент, мощность и скольжение; Мк, sк – критические момент и скольжение; Мп – пусковой момент
Основными достоинствами современных ПЧ являются:
– возможность плавной регулировки в широком диапазоне частоты вращения с сохранением максимального момента;
– программируемый (за определенное время) плавный пуск двигателей с автоматическим ограничением пускового тока, благодаря чему снижаются ударные механические нагрузки и увеличивается срок службы подшипников двигателя и механизма в целом;
– программируемая интенсивность электрического торможения;
– реализация энергосберегающей функции;
– повышение надежности системы управления асинхронными двигателями и снижение ее массогабаритных показателей в сравнении с управляющими релейно-контакторными схемами и т. д.
На практике использование ПЧ при управлении вентиляторами и насосами позволяет экономить до 60 % электроэнергии, до 25 % воды и до 10 % тепла.
На рис. 2 представлена функциональная схема преобразователя частоты.
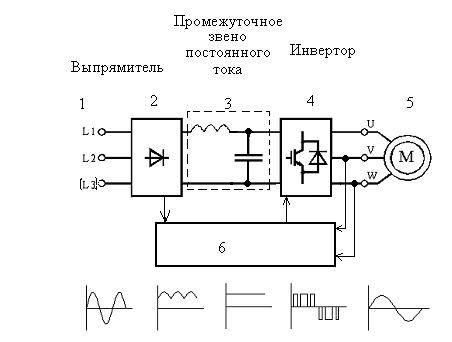
Рис. 2. Функциональная схема преобразователя частоты
Питание на ПЧ подается от трехфазной или однофазной сети промышленной частоты (1).
Неуправляемый диодный выпрямитель (блок 2) обеспечивает питание инвертора (блок 4) и цепей управления.
Инверторный блок (блок 4), выполненный на IGBT-модуле, формирует из постоянного напряжения блока 2 трехфазное выходное напряжение посредством широтно-импульсного модулирования (ШИМ). В обмотках двигателя формируется (блок 5) синусоидальный ток соответствующей частоты и напряжения (рис. 3)
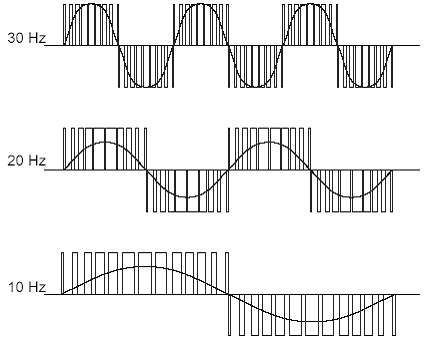
Рис. 3. Временные зависимости выходного напряжения ШИМ-преобразователя для различных частот, задаваемых
с помощью преобразователя частоты
Микроконтроллер (блок 6) обеспечивает формирование алгоритма ШИМ-управления по программно заданному закону.
Преобразователь частоты пч‑4501к
Внешний вид лицевой панели корпуса преобразователя частоты ПЧ-4501К приведен на рис. 4.
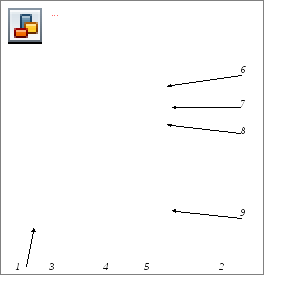
Рис. 4. Внешний вид лицевой панели преобразователя частоты ПЧ-4501:
1 – разъем питания 220 В, 50 Гц; 2 – светодиодный индикатор – Т, сигнализирующий о подаче на ПЧ напряжения питания 220 В, 50 Гц; 3 – индикатор выходной частоты; 4 – светодиодный индикатор – ВР (вращение), сигнализирующий о включении выходного каскада, т. е. инвертора, и наличии на выходе ПЧ трехфазного напряжения заданной частоты; 5 – светодиодный индикатор – РЕВ, сигнализирующий об изменении направления вращения, т. е. реверсе; 6 – кнопка «Пуск» (▲+); 7 – кнопка «Реверс» (◄–); 8 – кнопка «Стоп» ( ); 9 – трехфазный выход ПЧ
Кнопка «Стоп» выполняет также функцию “Enter” при вводе в ПЧ начальных параметров работы привода.
Порядок работы с преобразователем частоты
Работа с ПЧ начинается с установки начальных параметров: исходной частоты на выходе, направления вращения, интенсивности разгона и торможения и т. д.
Установка параметров начинается (после включения ПЧ в сеть) с введения пароля «1125» и его подтверждения нажатием кнопки «Стоп». Для этого после подачи на ПЧ питания (загорается светодиод Т) и появления на цифровом индикаторе “Stop” нажимается кнопка ( ) на 1–2 с до появления на индикаторе (----). После отпускания кнопки прибор переходит в режим установки исходных параметров. Порядок ввода и диапазоны допустимых значений параметров приведены в табл. 1.
Таблица 1
|
Номер параметра |
Наименование |
Предельные значения |
Комментарии |
Завод- ская установка |
|
1 |
Начальная частота вращения |
0020–0120 |
Начальное значение частоты на выходе преобразователя при нажатии кнопки «Пуск» |
0050 |
|
2 |
Темп разгона |
000,0–999,9 |
Время (с), за которое происходит увеличение частоты на 1 Гц |
000,1 |
|
3 |
Темп торможения |
000,0–999,9 |
Время (с), за которое происходит уменьшение частоты на 1 Гц |
000,1 |
|
4 |
Код способа управления ПЧ |
0000 0001 |
Потенциометром Кнопками «+» и «–» |
0000 |
|
5 |
Код включения торможения |
0000 0001 |
Торможение выключено Торможение включено |
0000 |
|
6 |
Код включения внешнего управления |
0000 0001 |
Управление выключено Управление включено |
0000 |
П римечание:
если во время набора соответствующей
цифры произошла ошибка (например,
превышение заданной величины), следует
продолжить набор до 9, а затем вновь
установить нужное значение.
римечание:
если во время набора соответствующей
цифры произошла ошибка (например,
превышение заданной величины), следует
продолжить набор до 9, а затем вновь
установить нужное значение.
Схема лабораторной установки
На рис. 5 представлена электрическая схема включения преобразователя частоты и асинхронного двигателя.
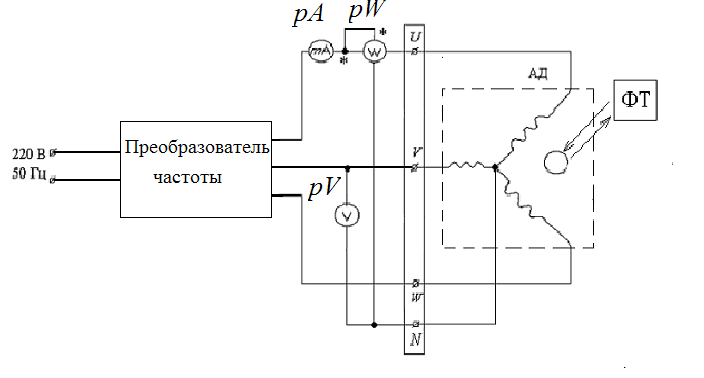
Рис. 5. Схема подключения преобразователя частоты к асинхронному двигателю
Схема содержит: преобразователь частоты, амперметр рА, вольтметр pV, включенный на линейное напряжение, и ваттметр рW, измеряющий мощность в одной фазе асинхронного двигателя. Асинхронный электродвигатель типа АОЛ 21/4 трехфазный мощностью 270 Вт, напряжением Uн = 220/380 В, величина тока Iн = 1,43/0,83 А, но-минальная частота вращения nн = 1400 об/мин, сos φ = 0,75, КПД η = 66 % .
Примечание. Измерение частоты вращения АД n2 осуществляется настройкой тахометра на метку, закрепленную на валу ротора. Расстояние от излучателя тахометра до метки не должно превышать 200 мм. Включение (отключение) тахометра производится кратковременным нажатием боковой кнопки. При этом на цифровом дисплее появляется буква F и загораются индикаторные светодиоды красного и зеленого цветов. Ориентируя излучатель тахометра по отношению к вращающейся метке, следует добиться одновременного свечения светодиодов: красного – непрерывно и зеленого – непрерывно или с периодическим миганием. При этом на дисплее отображается частота вращения в оборотах в минуту (об/мин).
Правильность выполненных измерений подтверждает соответствие (близкое значение) измеренной и синхронной частоты вращения n1 (например, 1500 об/мин для fп = 50 Гц, 900 об/мин для fп = 30 Гц, 600 об/мин для fп = 20 Гц).
Синхронная скорость вращения исследуемого АД (р = 2) определяется выражением
 ,
об/мин,
,
об/мин,
где fп – частота источника питания.