Материал: АВТОРЕФЕРАТ САВЧУКА_С_В. ВАК нац. библиотека
16
Для определения функциональных характеристик привода высевающих аппаратов сеялок с его различной кинематикой разработан стенд, общий вид которого с объектом испытаний приведен на рисунке 14.
а) |
б) |
а – привод от опорного колеса; б – привод от промежуточного колеса Рисунок 14. – Общий вид стенда для проверки функциональной работоспособности при-
вода высевающих аппаратов с различной кинематической схемой
Оценка качества функционирования электрогидравлического привода в по-
левых условиях была проведена на базе почвообратывающего посевного многофункционального агрегата, оборудованного электрогидравлической системой управления навесным устройством и внешними гидрофицированными потребителями. Ультразвуковой датчик измерения высоты расположения соединительного звена над рельефом поверхности был подключен к контроллеру указанной системы. При проведении испытаний выполнена проверка функционирования электрогидравлического привода с учетом качества заделки семян.
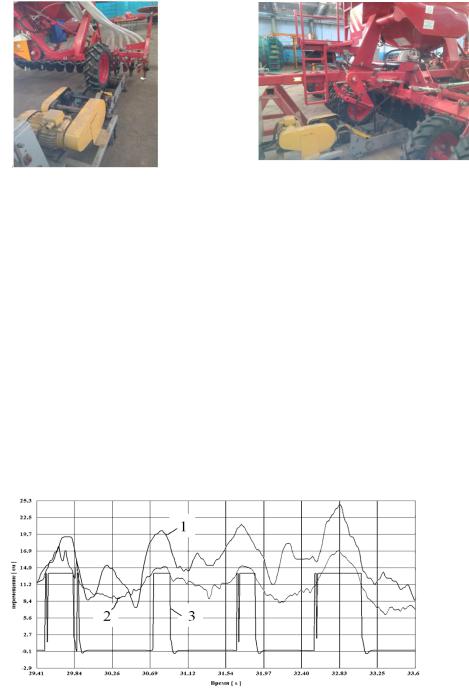
Осциллограммы рабочих процессов функционирования электрогидравлического привода рабочих органов приведены на рисунке 15.
Рисунок 15. – Характеристики процесса функционирования электрогидравлического привода при бесконтактном копировании рельефа поверхности
Анализ характеристик показывает, что выходной сигнал ультразвукового датчика расстояния 1 имеет удовлетворительную сходимость с сигналом контрольной системы контактного копирования 2, оснащенной эталонным колесом при периодическом подключении электромагнитов регулятора согласно управляющему сигналу 3.
17
Пример оценки качества процесса функционирования электрогидравлического привода рабочих органов сельхозмашины приведен в соответствии с комплексным критерием (1), причем при среднем значении весового коэффициента α=0,5, Vа=9,2% и VR=10 % согласно литературным источникам значение указанного критерия составляет Δ=9,6%. При сравнении различных вариантов реализации почвообрабатывающей операции меньшее значение критерия является предпочтительным.
Установлено, что для посевного агрегата с системой высотного регулирования количество семян, заделанных в рабочем слое, на 4,5% больше, чем в опыте с позиционным регулированием навесного устройства, а неравномерность по глубине почвообработки в 2 раза меньше.
ЗАКЛЮЧЕНИЕ
1.Разработана математическая модель процесса функционирования электрогидравлического привода рабочих органов мобильной машины в контуре высотного регулирования путем бесконтактного копирования рельефа поля, учитывающая взаимодействие ее остова с грунтовой опорной поверхностью посредством упругой пневмошины, кинематические, силовые возмущения и массогеометрические параметры остова при поступательном движении посевного агрегата, позволившая определить структуру и рациональные параметры электрогидравлического привода рабочих органов и повысить точность их позиционирования. При этом коэффициент вариации глубины обработки почвы для указанной структуры системы составляет 7,5%, а для разомкнутой системы – 55,7%, что указывает на высокое качество функционирования активной системы при значительном уменьшении статической ошибки [4, 7, 8].
2.Выявлено влияние структуры и параметров электрогидравлического привода посредством управляющего воздействия на точность позиционирования рабочих органов. Показано, что при уменьшении безразмерного параметра зоны нечувствительности в пределах 0,05...0,02 величина статического отклонения глубины обработки почвы снижается в 2,5 раза, что обеспечивает повышение качества функционирования электрогидравлического привода. Установлено влияние величины коэффициента передачи рычажного механизма силовой проводки электрогидравлического привода на упомянутый показатель качества, показано, что при обеспечении величины этого коэффициента в диапазоне 0,5...0,2 значение статического отклонения глубины обработки почвы снижается в 2,3 раза [1, 5]. Определено, что при функционировании исследуемого привода в полевых условиях неравномерность глубины обработки почвы в 2 раза меньше, чем при позиционном способе управления положением навесного устройства. Ожидаемая экономическая эффективность от использования в составе комбинированного почво-
18
обрабатывающе-посевного агрегата АППМ-6 без комплектации передними опорными колесами системы бесконтактного копирования рельефа поля составит 37,4 млн. белорусских рублей (в ценах 2015г., без учета деноминации) [2, 3].
3.Разработана методика экспериментально-статистических исследований в лабораторных условиях с имитацией рабочих процессов, позволившая получить достоверную оценку динамических свойств и качества функционирования электрогидравлического привода в составе системы высотного регулирования на основе интерполяционной модели в виде уравнения регрессии и вычислить функцию отклика для любого сочетания входных воздействий в выбранном факторном пространстве [19].
4.Разработан стенд для имитации кинематических и силовых возмущений со стороны рельефа, отличающийся тем, что на раме закреплены плоский экран и электромагнит постоянного тока с цилиндрическим магнитопроводом, в зоне действия которого расположен плоский якорь из ферромагнитного материала с толкателем, кинематически связанным с подпружиненной виброплощадкой, причем указанный экран расположен на раме горизонтально под ультразвуковым датчиком высотного регулирования, а упомянутый электромагнит электрически подключен к источнику пульсирующего тока. Стенд обеспечивает формирование возмущающих воздействий различной величины и характера на объект испытаний для получения его динамических характеристик, а также снижение затрат и сроков на испытания и доводку систем высотного регулирования рабочих органов сеялок в межсезонный период [6, 9, 19]. Кроме того, разработан стенд для проверки функциональной работоспособности привода высевающих аппаратов, который позволяет снизить трудоемкость испытаний привода при оценке качества высева семян в полевых условиях [19]. По результатам исследований предложены принципиальные, структурные схемы и конструкции технических устройств, новизна которых подтверждена патентами Республики Беларусь и Российской Федерации
[13-18].
5.Предложен комплексный критерий оценки качества процесса функционирования электрогидравлического привода рабочих органов мобильных машин, который включает агротехнический и динамический показатели. В отличие от существующих указанный критерий основан на обобщенной оценке, выраженной математической зависимостью коэффициента вариации глубины обработки почвы
итягового сопротивления при выполнении технологического процесса [10, 11].
6.Для повышения качества процесса функционирования электрогидравлического привода рабочих органов мобильных машин, или повышения точности позиционирования рабочих органов, рекомендуется ввести в его структуру контур высотного регулирования с использованием акустических средств определения расстояния [1, 12].
19
СПИСОК ОПУБЛИКОВАННЫХ РАБОТ ПО ТЕМЕ ДИССЕРТАЦИИ
Научные статьи в рецензируемых научных журналах, входящих в списки научных изданий для опубликования результатов диссертационных исследований
1. Савчук, С. В. Бесконтактное регулирование глубины обработки почвы с применением ультразвукового датчика и гидравлики трактора / С. В. Савчук, Е. Я. Строк // Вестн. БрГТУ. Сер. Водохозяйственное строительство, теплоэнергетика и геоэкология. – 2014. – № 2. – С. 41–43.
2. Результаты испытаний опытного образца сеялки пневматической С–9 / Н. Д. Лепешкин [и др.] // Механизация и электрификация сельского хозяйства : межвед. тематич. сб. / НПЦ НАН Беларуси по механизации сельского хозяйства ; редкол.: П. П. Казакевич (пред.) [и др.]. – Минск, 2013. – Вып. 47 : в 2 т. – Т.1. – С. 104–109.
3. К разработке сеялки прямого посева к энергонасыщенным тракторам мощностью 260 кВт / Н.Д. Лепешкин [и др.] // Механизация и электрификация сельского хозяйства : межвед. тематич. сб. / НПЦ НАН Беларуси по механизации сельского хозяйства ; редкол.: П. П. Казакевич (пред.) [и др.]. – Минск, 2014. – Вып. 48 : в 2 т. – Т.1 – С. 50–57.
4. Повышение точности позиционирования навесного устройства трактора / Е. Я. Строк [и др.] // Механика машин, механизмов и материалов. – 2015. – № 3. –
С. 135–137.
5.Определение энергетических характеристик способов регулирования скорости исполнительного механизма электрогидравлического привода навесного устройства / Е. Я. Строк [и др.] // Агропанорама. – 2015. – № 3. – С. 2–5.
6.Имитация рабочих процессов электрогидравлических регуляторов давления / Е. Я. Строк [и др.] // Актуальные вопросы машиноведения: сб. науч. тр. / Объедин. ин-т машиностроения НАН Беларуси; редкол.: С. Н. Поддубко (пред.)
[и др.]. – 2015. – С. 135–137.
7.Обоснование структурных и конструкционных параметров чувствительного к нагрузке регулятора расхода рабочей жидкости / Е. Я. Строк [и др.] // Актуальные вопросы машиноведения: сб. науч. тр. / Объедин. ин-т машиностроения НАН Беларуси; редкол.: С. Н. Поддубко (пред.) [и др.]. – 2015. – С. 138–141.
8.Савчук, С. В. Процесс функционирования электрогидропривода в составе системы автоматического регулирования глубины обработки почвы / С. В. Савчук
//Вестн. БрГТУ. Сер. Машиностроение. – 2015. – № 4. – С. 64–67.
Статьи в инженерных журналах
9. Сеялка пневматическая С9 / Н. Д. Лепешкин [и др.] // Сельскохозяйственная научно-техническая и рыночная информация. – 2013. – № 4 – С. 39–42.
20
10. Раздельный сев может быть быстрым и эффективным / Н. Д. Лепешкин, [и др.] // Белорусское сельское хозяйство. – 2013. – № 3 – С. 98–100.
Статьи по материалам конференций
11.Сокращение сроков и повышение качества сева в республике Беларусь / Н. Д. Лепешкин [и др.] // Технический прогресс в сельскохозяйственном производстве : материалы IX Всеукраинской конференции-семинара, Глеваха, 21–23 мая 2014 г. / Институт механизации и электрификации сельского хозяйства ; редкол.: В. А. Михайлов (гл. ред.) [и др.]. – Глеваха, 2014. – С. 24–26.
12.Лепешкин, Н. Д. Новые возможности эффективного сева в республике Беларусь / Н. Д. Лепешкин, Н. Ф. Сологуб, С. В. Савчук // Инновационное развитие АПК России на базе интеллектуальных машинных технологий : материалы междун. науч.-техн. конф., Москва, 17–18 сент. 2014 г. / ФГУБНУ ВИМ ; редкол.: Ю. Ф. Лачуга (пред.) [и др.] – М., 2014. – С. 146 – 148.
Патенты на изобретения и полезные модели
13.Однодисковый сошник : полез. модель BY 3512 / С. В. Савчук, И. В. Савчук, С. Л. Разумец, В. Ф. Завадский, А. Д. Троцюк. – Опубл. 30.04.2007.
14.Однодисковый сошник : пат. BY 012652 / С. В. Савчук, И. В. Савчук, С. Л. Разумец, В. Ф. Завадский, А. Д. Троцюк. – Опубл. 30.12.2009.
15.Узкорядный сошник : полез. модель BY 7308 / С. В. Савчук, С. Л. Разу-
мец, В. Ф. Завадский, Н. С. Жогал. – Опубл. 30.06.2011.
16. Узкорядный сошник : пат. BY 016481 / С. В. Савчук, С. Л. Разумец, В. Ф. Завадский, Н. С. Жогал. – Опубл. 30.05.2012.
17.Сеялка с пневматическим высевающим аппаратом : полез. модель BY 10524 / Н. Д. Лепешкин, А. Н. Смирнов, Н. Ф. Сологуб, С. В Савчук. – Опубл.
28.02.2015.
18.Сеялка с пневматическим высевающим аппаратом : пат. BY 029183 / Н. Д. Лепешкин, А. Н. Смирнов, Н. Ф. Сологуб, С. В. Савчук. – Опубл. 28.02.2018.
19.Стенд для лабораторный испытаний сеялки с ультразвуковым датчиком высотного регулирования положения рабочих органов : полез. модель BY 11870 / Д. Г. Олиферчик, С. В. Савчук, Е. Я. Строк, Л. Д. Бельчик, А. А. Ананчиков. –
Опубл. 28.02.2019.