Материал: АВТОРЕФЕРАТ САВЧУКА_С_В. ВАК нац. библиотека
11
Показателями качества переходных процессов изменения глубины обработки почвы для систем управления с различной структурой при возмущающем кинематическом воздействии с асимптотой у является статическая ошибка копирования рельефа поля e (таблица 1).
e a a(0),
где a∞ – установившееся значение глубины обработки, или статическое отклонение; a(0) – начальное значение глубины обработки.
а) |
б) |
1 и 2 – процессы, соответствующие значениям асимптот экспоненты 0,015 м и 0,03 м Рисунок 9. – Изменение глубины обработки почвы агрегатом с замкнутой (а) и разомкнутой (б) системами управления при уменьшении неровности
Таблица 1. – Результаты теоретических исследований при экспоненциальном возмущающем кинематическом воздействии
Структура |
Увеличение неровности |
Уменьшение неровности |
|||
|
|
|
|
||
y, м |
, м |
y, м |
e , м |
||
|
|||||
|
|
|
|
|
|
Замкнутая система |
0,015 |
- 0,00011 |
0,015 |
0,00012 |
|
0,03 |
0,00008 |
0,03 |
0,00008 |
||
|
|||||
Разомкнутая система |
0,015 |
0,01962 |
0,015 |
- 0,02900 |
|
0,03 |
0,03928 |
0,03 |
- 0,03920 |
||
|
|||||
Приведенные результаты показывают высокую точность копирования рельефа поверхности рабочими органами машины, система управления которыми является замкнутой посредством бесконтактного высотного датчика, т.к. агротехническое требование соблюдения глубины обработки почвы составляет ± 0,01 м. Статическая ошибка глубины обработки почвы рабочими органами для разомкнутой системы значительно превышает величину ошибки замкнутой системы, что не обеспечивает соблюдение агротехнических требований.
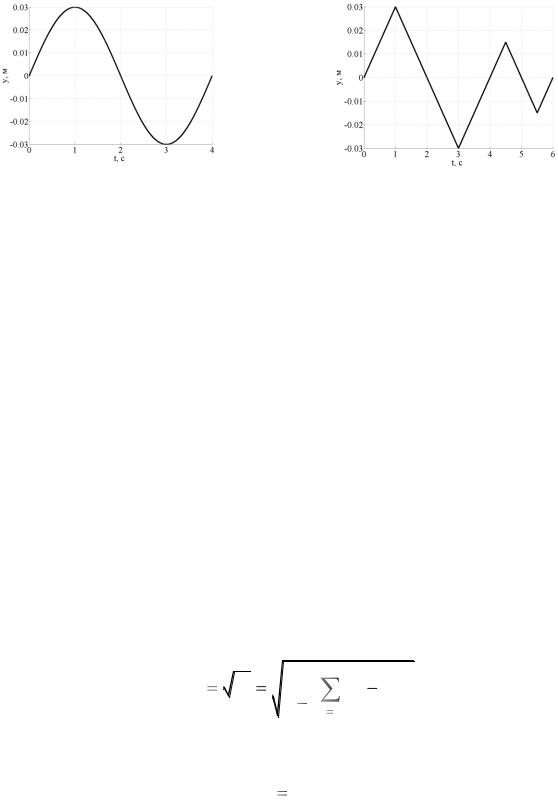
На рисунке 10 изображены входные сигналы системы при периодических законах изменения во времени.
Изменение глубины обработки почвы в зоне высотного датчика для замкнутой и разомкнутой систем при различных периодических законах изменения воз-
12
мущающих воздействий в случае вертикального перемещения опорно-приводных колес с резиновыми шинами показано на рисунке 11.
а) |
б) |
а и б – законы изменения возмущений соответственно синусоидальный и треугольный с переменными во времени параметрами
Рисунок 10. – Кинематические возмущения на входе динамической системы
а)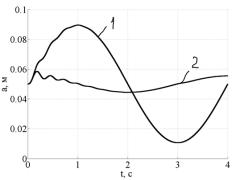 б)
б)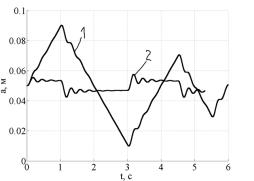
а и б – процессы, соответствующие гармоническому и треугольному с переменными во времени параметрами законам изменения возмущающих воздействий
Рисунок 11. – Изменение глубины обработки почвы агрегатом с разомкнутой (1) и замкнутой (2) системами управления
Для сравнительной оценки точности обеспечения глубины обработки почвы замкнутой и разомкнутой систем используем величину коэффициента вариации.
Наилучшей оценкой генерального среднего квадратического отклонения является исправленное среднее квадратическое отклонение, или стандарт
|
|
|
|
1 |
|
n |
|
2 |
|
|
s2 |
|
|
|
|||||
s |
|
|
а |
а |
, |
||||
|
|
|
|
||||||
|
|
|
|
|
|
i |
s |
|
|
|
|
|
n |
|
1 i 1 |
|
|
|
|
где n – объем выборки; ai и as– текущее и заданное значение глубины обработки. Коэффициент вариации глубины обработки равен отношению
V |
s |
100% . |
|
||
а |
аs |
|
|
||
В таблице 2 приведены результаты теоретических исследований влияния структуры системы и величины входного воздействия на коэффициент вариации глубины обработки почвы при периодических возмущающих воздействиях.
13
Таблица 2. – Результаты теоретических исследований при периодических возмущающих воздействиях
|
Гармонический закон |
Треугольный закон |
|||
Структура |
|
|
|
|
|
y, м |
Т, с |
Va, % |
Va, % |
||
|
|||||
Замкнутая система |
0,015 |
2 |
8,2 |
7,5 |
|
|
0,03 |
4 |
7,8 |
|
|
Разомкнутая система |
0,015 |
2 |
28,2 |
55,7 |
|
|
0,03 |
4 |
55,7 |
|
|
Сравнительный анализ приведенных результатов показывает, что агротехнические требования выполняются при функционировании замкнутой системы.
Для определения характера влияния основных параметров электрогидравлического привода на точность высотного позиционирования выполнены расчеты, сответствующие графики которых представлены на рисунке 12.
а) |
б) |
а– 1 и 2 – коэффициент передачи от рабочих органов к соединительному звену: Kfc= 0,5 и Kfc = 0,2; б – 1, 2 и 3 – параметры зоны нечувствительности: Ψ=0,05; Ψ=0,03 и Ψ=0,02 Рисунок 12. – Влияние параметров электрогидравлического привода на величину статического отклонения глубины обработки почвы
Анализ приведенных зависимостей показывает, что с уменьшением безразмерного параметра зоны нечувствительности Ψ в пределах 0,05...0,02 величина статического отклонения глубины обработки почвы  снижается с 0,110 м до 0,104 м, т.е. статическая точность высотного позиционирования увеличивается. С уменьшением коэффициента передачи Kfc в диапазоне 0,5...0,2 статическая точность высотного позиционирования
снижается с 0,110 м до 0,104 м, т.е. статическая точность высотного позиционирования увеличивается. С уменьшением коэффициента передачи Kfc в диапазоне 0,5...0,2 статическая точность высотного позиционирования  снижается с 0,103 м до
снижается с 0,103 м до
0,101 м.
В четвертой главе приведены результаты экспериментальных исследований процесса функционирования электрогидравлического привода системы высотного регулирования. С целью испытаний компонентов указанного привода разработан стенд, функциональная схема которого изображена на рисунке 13.
Бесконтактное взаимодействие электромагнитного привода с подпружиненной виброплощадкой посредством плоского якоря обеспечивает имитацию кинематических возмущений со стороны рельефа поля, а силовое сопротивление поч-
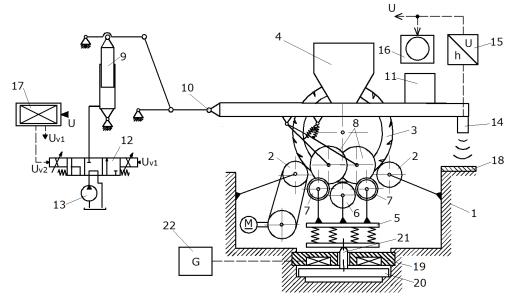
14
вы воспроизводится за счет регулируемых сил трения со стороны фрикционов на рабочие органы.
1 – рама; 2 – ролики; 3 – приводныеколеса; 4 – сеялка; 5 – виброплощадка; 6 – опорный ролик; 7 – устройство имитации сопротивления почвы; 8 – сошники; 9 – навесное
устройство; 10 – |
соединительное звено; 11 – груз; 12 – регулятор; |
13 |
– |
насос; |
|||
14 |
– |
ультразвуковой датчик расстояния; 15 – преобразователь; |
16 – |
осцилограф; |
|||
17 |
– |
контроллер; |
18 – экран; 19 – электромагнит постоянного |
тока; |
20 |
– |
якорь; |
21 – толкатель; 22 – источник питания, UV1 и UV2 – управляющие воздействия
Рисунок 13. – Схема стенда для лабораторных испытаний электрогидравлического привода системы высотного регулирования положения рабочих органов
Влияние внешних факторов на качество функционирования электрогидравлического привода в составе системы высотного регулирования целесообразно оценить на основе многофакторного анализа в локальной области указанных факторов, причем разработанная методика должна отражать последовательность действий при планировании эксперимента. Выходной величиной интерполяционной модели является высота расположения ультразвукового датчика, закрепленного на остове сеялки, над плоским горизонтальным экраном.
Разработанная методика лабораторных исследований отражает последова-
тельность действий при планировании эксперимента и регрессионном анализе результатов.
На основании анализа приведенных данных выбраны следующие основные уровни и интервалы варьирования для факторов, соответствующих области проведения эксперимента (таблица 3): амплитуда и период кинематического возмущения со стороны подпружиненной виброплощадки стенда, а также обобщенная жесткость резиновых шин.
Условия проведения эксперимента определены в виде матрицы планирования (таблица 4), где строки соответствуют различным опытам, а столбцы – значениям факторов.
15
Таблица 3. – Основные уровни и интервалы варьирования факторов
|
Фактор, размерность |
Уровень фактора |
Интервал |
||
|
-1 |
0 |
+1 |
варьирования |
|
|
|
||||
1 |
– амплитуда, м |
0,015 |
0,0225 |
0,03 |
0,0075 |
2 |
– период, с |
2 |
3 |
4 |
1 |
3 |
– жесткость, Н/м |
4,5∙105 |
5,5∙105 |
6,5∙105 |
1∙105 |
Таблица 4. – Матрица планирования и результаты вычислительного эксперимента
Номер |
|
Факторы |
|
|
|
|
Отклик |
|
|
||
опыта |
х0* |
х1 |
х2 |
х3 |
yа' |
yа'' |
** |
|
y*** |
( y)2 |
**** |
1 |
+ |
- |
- |
+ |
8,06 |
8,06 |
8,06 |
|
0 |
0 |
0 |
2 |
+ |
- |
+ |
- |
4,48 |
4,49 |
4,485 |
|
-0.005 |
2,5· |
5· |
3 |
+ |
+ |
- |
- |
21,9 |
21,8 |
21,85 |
|
0.05 |
0,0025 |
0,005 |
4 |
+ |
+ |
+ |
+ |
7,84 |
7,82 |
7,83 |
|
0.01 |
1· |
2· |
5 |
+ |
- |
- |
- |
8,73 |
8,73 |
8,73 |
|
0 |
0 |
0 |
6 |
+ |
- |
+ |
+ |
3,97 |
3,95 |
3,96 |
|
0.01 |
1· |
2· |
7 |
+ |
+ |
- |
+ |
19,87 |
19,86 |
19,865 |
|
0.005 |
2,5· |
5· |
8 |
+ |
+ |
+ |
- |
8,44 |
8,42 |
8,43 |
|
0.01 |
1· |
2· |
bj |
10,4 |
4,093 |
4,228 |
- 0,473 |
|
|
|
|
|
0,00285 |
|
Примечания: *вектор-столбец фиктивной кодированной переменной х0; среднее значение откликов yа 'и yа'';*** разность между значением отклика в каждом опыте и средним значением; ****дисперсия в каждом опыте.
Согласно таблице 4 уравнение регрессии имеет вид
ya 10,4x0 4,093x1 4,228x2 0,473x3.
Анализ уравнения регрессии показывает влияние его коэффициентов, соответствующих возмущающим воздействиям (амплитуда и период) и конструкционным факторам (обобщенная жесткость резиновых шин), на функцию отклика в зависимости от их величины и знака.
С учетом положения о том, что максимальная урожайность зерновых культур при минимальных затратах связана с тяговым сопротивлением агрегата и точным распределением семян по глубине и площади посева, предлагается комплекс-
ный критерий оценки качества процесса функционирования электрогидравличе-
ского привода рабочих органов технологического оборудования мобильной машины, содержащий агротехническую и динамическую составляющие. При этом указанный критерий выражен через их сумму согласно формуле
Va (1 )VR , |
(1) |
где α – весовой коэффициент, определенный согласно неравенству 0 ≤ α ≤1; Vа и VR – коэффициенты вариации глубины обработки почвы и тягового сопротивления рабочих органов.