Материал: Автоматизированное проектирование информационно-измерительной системы на основе SCADA
Входным воздействием первоначально служит
постоянное скачкообразное воздействие. Параметры объекта управления заданы в
таблице 3.
Таблица 3 - Параметры объекта управления
|
№ |
Коэффициент передачи |
Постоянная времени (с) |
Запаздывание (с) |
Входной сигнал |
Вход SNS |
|
16 |
7 |
0.5 |
Случайный |
1 |
В слое Шаблоны программ создадим программу и
зададим ей входные и выходные аргументы. Входному аргументу «Случайный» и
выходному «Выход» назначим аргументы «Случайный» из программы имитации объекта
управления со случайными числами и «Выход» из программы имитации управления
соответственно. Аргументы программы представлены на рисунке 15.

Рисунок 15 - Аргументы программы имитации
объекта управления
В качестве языка программирования применим FDB.
В языке FDB
для формирования программы используется стандартные компоненты из библиотеки
элементов. Результат представлен на рисунке 16.
Рисунок 16 - Программа имитации объекта
управления
Откомпилируем программу. Получим сообщение,
представленное на рисунке 17.
Рисунок 17 - Сообщение об успешной компиляции
программы
3. Экспериментальные исследования
.1 Моделирование имитаторов ОУ в реальном
времени
Необходимо произвести испытания разработанных имитаторов в реальном времени.
Для наглядности изменения выходного сигнала
объекта управления необходимо разместить на экране дополнительный текстовый
элемент «Выход». Создадим на тренде еще одну кривую «Выход», как показано на
рисунке 18.
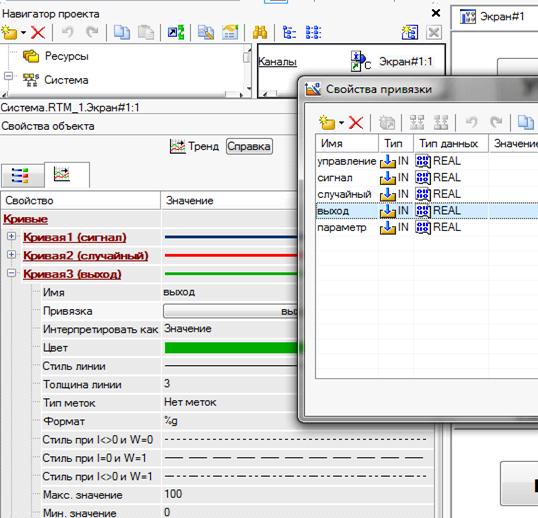
Рисунок 18 - Привязка к кривой «Выход»
Результат работы представлен на рисунке 19.

Рисунок 19 - Результат моделирования ИУС
Выход показывает изменение выходного сигнала
объекта управления от 40 до 72. Среднее значение примерно 30. Время переходного
процесса согласно графику примерно 30 секунд, что полностью соответствует
теоретическому значению.
.2 Первичное моделирование объекта управления
при скачкообразном входном сигнале
Для выполнения моделирования объекта управления
при скачкообразном сигнале изменим входной параметр Программы#3 на 50, как представлено
на рисунке 20.
Рисунок 20 - Программа#3
Запустим профайл и посмотрим, как изменяется
объект управления при скачкообразном входном сигнале. Результат представлен на
рисунке 21.

Рисунок 21 - Первичное моделирование объекта
управления при скачкообразном входном сигнале
Из рисунка 21 видно, что при входном сигнале равном 50 выходной сигнал прекращает свой рост на отметке 58, что соответствует теоретическому значению равному 50 * k = 50*1.1 = 55.
Теоретическое значение времени перехода: Tтеор = 3*T=3*7= 21 секунды.
Экспериментальное значение времени перехода, в
соответствии с графиком изображенным на рисунке 19, Tэкс=
30 секунды.
Заключение
В процессе работы была спроектирована и создана ИУС в SCADA-среде Trace Mode. Был разработан индицирующий прибор, к которой были подключены имитаторы входного воздействия и объекта управления. Сигнал генератора, входного и управляющего воздействия и выходной сигнал выведены на «Тренд» в виде кривых.
Выход показывает изменение выходного сигнала объекта управления от 40 до 72, что близко к теоритическому рассчитанному. Время переходного процесса согласно графику примерно 27 секунд.
При первичном моделировании объекта управления при скачкообразном входном сигнале получено, что выходной сигнал при достижении отметки «80» останавливается. Экспериментальное время перехода, в соответствии с полученным графиком, Tэкс= 30 секунды, что совпадает с теоретическим значением.
Таким образом, концепция
объектно-ориентированного проектирования подразумевает, что основой управления
процессом реализации программы является передача сообщений объекта. Поэтому
объекты должны определяться совместно с сообщениями, на которые они должны
реагировать при выполнении программы.
Литература
1. Стандарт предприятия СТП 1-У-НГТУ-2004. Общие требования к оформлению пояснительных записок дипломных и курсовых проектов. Н.Новгород. НГТУ. 2004. - 26 с.
. Объектно-ориентированное проектирование информационно-управляющих систем. Методические указания по курсовому проекту /Составитель: Волков В.Л. -Арзамас: ООО «Ассоциация ученых», 2013. - 8 с.
3. Волков В.Л. Автоматизированное проектирование информационно-управляющих систем. Учебное пособие/ -Арзамас: ООО «Ассоциация ученых», 2012. - 40 с.