Материал: Metod2
Схема №0. Рис.21
Вели- |
|
|
Номер числових даних до схеми №0 |
|
|
|||||
чина |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
z1 |
18 |
34 |
19 |
36 |
16 |
20 |
45 |
15 |
18 |
36 |
z2 |
45 |
17 |
38 |
20 |
48 |
70 |
40 |
27 |
21 |
60 |
z2/ |
18 |
16 |
48 |
20 |
15 |
18 |
16 |
24 |
20 |
16 |
z3 |
12 |
40 |
12 |
16 |
15 |
27 |
20 |
36 |
40 |
32 |
z4 |
42 |
96 |
72 |
52 |
45 |
72 |
56 |
96 |
100 |
80 |
z5 |
20 |
21 |
40 |
20 |
17 |
16 |
18 |
22 |
25 |
48 |
z6 |
70 |
63 |
56 |
80 |
65 |
48 |
54 |
88 |
50 |
24 |
n1,об/хв |
250 |
175 |
200 |
150 |
240 |
630 |
360 |
540 |
350 |
300 |
Знайти |
|
|
і15, n5 |
|
|
|
|
і16, n6 |
|
|
|
|
5. Приклади розв’язання завдань. |
|||
|
A |
|
|
|
Приклад завдання №1. |
|
|
11 |
|
Розв’язання. |
|
1 |
|
|
|
До складу плоского механізму |
|
J |
|
|
|
входять n=11 рухомих ланок (рис.22) |
|
|
|
|
|
||
2 |
B |
|
10 |
|
та р5=16 кінематичних пар V класу (13 |
|
|
обертальних та 3 поступальні): |
|||
|
H |
|
|||
|
8 |
|
|
А (0,1) – поступальна; |
|
|
|
|
|
||
|
3 |
N |
|
|
А (1,2) – обертальна; |
|
9 |
|
В (2,3) – обертальна; |
||
|
C |
|
|
C (3,4) – обертальна; |
|
4 |
|
|
|
|
D (4,0) – обертальна; |
E |
|
M |
L |
E (3,5) – обертальна; |
|
D |
|
|
|
E (5,6) – обертальна; |
|
|
|
|
|
||
|
5 |
|
|
7 |
E (5,8) – обертальна; |
|
6 |
|
E (5,0) – поступальна; |
||
|
Рис.22 |
K |
|
К (6,7) – обертальна; |
|
|
|
|
|
||
|
|
|
|
|
21 |
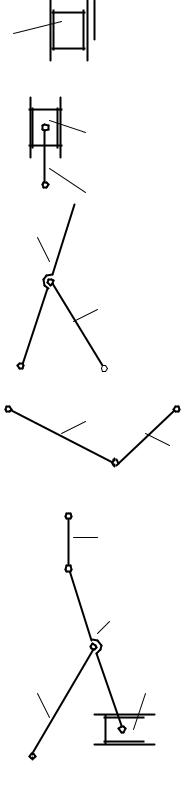
L (7,0) – обертальна; M (9,0) – обертальна; N (8,9) – обертальна; H (8,10) –
обертальна; J(10,11) – обертальна; J(0,11) – поступальна.
Враховано, що шарнір Е є трикратним, тому що в ньому з’єднуються 4 ланки. Номером «0» позначений стояк (нерухома ланка).
Ступінь вільності механізму обчислюємо за формулою Чебишева:
W=3n − 2 p5 − p4 =3 11 − 2 16 −0 =1.
Уцьому механізмі повинна бути одна початкова ланка (повзун 1), яка
разом із стояком 0 утворює механізм І класу:
W =3n − 2 p5 − p4 =3 1 − 2 1 −0 =1
Кінематичний ланцюг, який залишився, розбиваємо 1  на структурні групи. Відокремлення структурних груп, як правило, розпочинаємо з ланок і пар, які найбільше
на структурні групи. Відокремлення структурних груп, як правило, розпочинаємо з ланок і пар, які найбільше
віддалені від початкової ланки (рис.23).
11
10
8
9
6
2
3
4
Рис.23
W =3n − 2 p5 − p4 =3 2 − 2 3 −0 =0 .
Структурна група ІІ класу ІІ виду.
W =3 2 − 2 3 −0 =0 .
Структурна група ІІ класу І виду
7 |
W =3 2 − 2 3 −0 =0 . |
Структурна група ІІ класу І виду |
W =3 4 − 2 6 −0 =0.
Структурна група ІІІ класу. Розділити цей кінематичний ланцюг на простіші з нульовим ступенем вільності неможливо. Базовою ланкою є ланка 3.
|
5 |
Формула будови механізму має вигляд: |
||||
|
|
I (0,1) → III ( |
3 |
) |
→ |
II (6,7) |
|
|
|||||
|
|
|
→ II (8,9) → II (10,11) |
|||
|
|
2,4,5 |
||||
|
|
|
|
|||
В цілому механізм Ш класу.
22
|
|
|
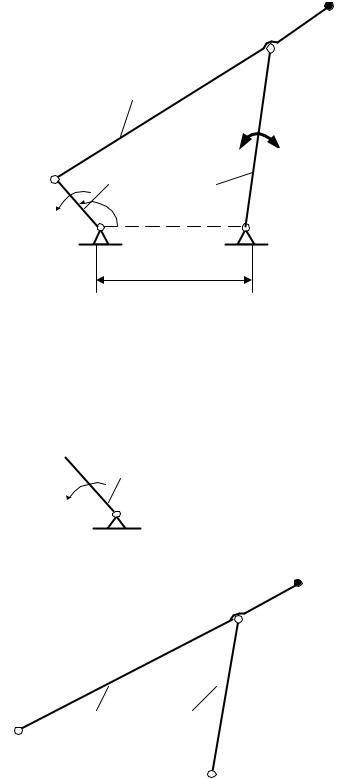
Приклад завдання №2. |
|
|
|
|
T |
Задано: |
|
|
|
B,S2 |
φ1=2200 |
|
|
2 |
n1=170 |
|
|
|
|
lOA=lAB=lBC=0,15м |
|
|
|
|
|
|
|
|
|
|
1 |
A |
|
|
M0 |
lBT= 3lAB =0,05м |
|
1 |
|
M0=135Нм |
|
n1 |
φ1 |
3 |
|
|
|
Ланки 1, 3 є повноповорот- |
|||
|
C,S3 |
|||
О,S1 |
|
|
ними. |
|
|
|
a |
|
|
|
|
|
|
|
Рис.24
Розв’язання.
1. Структурний аналіз.
Механізм (рис.24) складається з 3 рухомих ланок та 4 обертальних кінематичних пар V класу: О(0,1), А(1,2), В(2,3), С(3,0). Ланка «0» - стояк. Початкова ланка 1 – кривошип. За формулою Чебишева:
1 W =3n − 2 p5 − p4 =3 1 − 2 1 =1
Механізм І класу з обертальною кінематичною парою.
W =3n − 2 p5 − p4 =3 2 − 2 3 =0
Структурна група ІІ класу І виду.
2 3
Рис.25 Формула будови механізму: І(0,1)→ІІ(2,3). Механізм ІІ класу.
2. Кінематичний синтез.
Механізм буде двокривошипним (тобто ланки 1, 3 будуть повноповоротними), якщо розміри його ланок відповідають правилу
23
Грасгофа і за стояк прийнято найкоротшу ланку /6/. Отже, для виконання умови задачі достатньо обрати a <lOA . Візьмемо а=0,08м.
|
|
|
Будуємо |
схему |
механізму |
(рис.26) |
в |
масштабі |
|||
µ |
l |
= |
lOA |
= |
0,15м |
=0,002 |
м |
при заданому куті повороту ланки 1 |
ϕ =2200. |
||
|
|
|
|||||||||
|
|
OA |
|
75мм |
|
мм |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|||
Тоді OC = lOC =0,08/0,002=40мм.
µl
3. Кінематичне дослідження механізму. а) Аналітичний метод /4/:
Визначаємо положення ланок, тобто кути нахилу ланок 2,3 до осі Ох. Позначимо їх φ2, φ3.
Початок декартової системи координат розмістимо в точці О. Положення точки А при заданому куті повороту початкової ланки
ϕ1 =2200 визначимо координатами:
xA =lOA cosϕ1 =0,15 cos2200 = −0,115 м
yA =lOA sinϕ1 =0,15 sin 2200 = −0,096м
За умовами задачі: xC = a =0,08 м
yC =0
Тоді відстань між зовнішніми кінематичними парами А і С структурної
групи: lAC = (xC − xA )2 |
+ ( yC − yA )2 |
= |
(0,08 + 0,115)2 |
+ (0 + 0,096)2 =0,217 м, |
|||||||||||||||
tgβ = |
yC − yA |
= |
0,096 |
|
=0,4923 β = 26,20 |
|
|
||||||||||||
|
|
0,08 + 0,115 |
|
|
|||||||||||||||
|
xC − xA |
|
|
|
|
|
|
|
|
||||||||||
З трикутника АВС за теоремою косинусів: |
|
|
|
|
|
||||||||||||||
|
|
l 2 |
+l 2 |
−l 2 |
|
0,2172 + 0.152 −0,152 |
δ = 43,70 |
||||||||||||
cosδ = |
|
AC |
AB |
BC |
|
= |
|
|
|
|
|
|
|
=0,7233 |
|||||
|
|
2lAC lAB |
|
|
2 0,217 |
0,15 |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
cos µ = |
|
l 2 |
+l 2 |
−l 2 |
= |
0.152 + 0,152 |
−0,217 |
2 |
|
= −0,04642 |
µ =92,70 |
||||||||
|
AC |
AB |
BC |
|
|
|
|
|
|
|
|
||||||||
|
|
2lAC lAB |
|
|
|
2 0,15 0,15 |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Тоді зовнішній |
кут |
ν = µ +δ =92,70 |
+ 43,70 =136,40 |
і |
кути нахилу ланок: |
||||||||||||||
ϕ2 = β −δ = 26,20 − 43,70 = −17,50
ϕ3 =3600 −ν + β =3600 −136,40 + 26,20 = 249,80
Отримані аналітичним шляхом кути порівнюємо з відповідними кутами на плані механізму та переконуємося, що вони приблизно рівні.
Швидкість і прискорення точки А знаходимо, враховуючи, що кривошип 1 рухається з постійною кутовою швидкістю
ϖ1 = π30n1 = π 30170 =17,8c−1 :
vA =lOA ω1 =0,15 17,8 =G 2,67 м/с.
Кут нахилу вектора vA до координатної осі Ох знаходимо, враховуючи напрямок обертання кривошипа:
γA =ϕ1 +900 = 2200 +900 =3100
24

aA =lOA ω12 =0,15 17G,82 = 47,53 м/с2.
Кут нахилу вектора aA до координатної осі Ох:
ψ A =ϕ1 −1800 = 2200 −1800 = 400
Кутові швидкості та прискорення ланок механізму визначаємо за формулами
/4/:
|
v |
A |
cos(ϕ |
3 |
−γ |
A |
) −v |
C |
cos(ϕ |
3 |
−γ |
C |
) |
|
2,67cos(249,80 |
−3100 ) −0 |
− |
ω2 = |
|
|
|
|
|
|
|
= |
0,15sin(−17,50 |
− 249,80 ) |
=8,86c 1 |
||||||
|
|
|
lAB sin(ϕ2 |
−ϕ3 ) |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
v |
A |
cos(ϕ |
2 |
−γ |
A |
) −v |
C |
cos(ϕ |
2 |
−γ |
C |
) |
|
|
2,67cos(−17,50 −3100 ) −0 |
− |
||||||||||||||
ω3 |
= |
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
=15,03c 1 |
||||||||||
|
|
|
|
lAB sin(ϕ2 −ϕ3 ) |
|
|
|
|
|
|
|
0,15sin(−17,50 − 249,80 ) |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
ε |
|
= |
a |
A |
cos(ψ |
A |
−ϕ |
3 |
) − a |
C |
cos(ψ |
C |
−ϕ |
3 |
) +ω2l |
BC |
−ω2l |
AB |
cos(ϕ |
2 |
−ϕ |
3 |
) |
|
= |
|||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
2 |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
lAB sin(ϕ2 − |
ϕ3 ) |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
= |
|
47,53cos(400 |
− 249,80 ) +15,032 0,15 −8,862 0,15 cos(−17,50 − 249,80 ) |
= −45,4c−2 ; |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
0,15sin(−17,50 − 249,80 ) |
|
|
|
|
|
|
|
|
||||||
ε |
|
|
= |
a |
A |
cos(ψ |
A |
−ϕ |
2 |
) − a |
C |
cos(ψ |
C |
−ϕ |
2 |
) +ω2l |
BC |
cos(ϕ |
2 |
−ϕ |
3 |
) −ω2l |
AB |
= |
||
3 |
|
|
|
|
|
|
3 |
|
|
2 |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
lBC sin(ϕ2 |
−ϕ3 ) |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
= |
|
47,53cos(400 +17,50 ) +15,032 0,15 cos(−17,50 −249,80 ) −8,862 0,15 |
=81,2c−2 . |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
0,15sin(−17,50 −249,80 ) |
|
|
|
|
|
|
|
|
|
|||||||
Знак плюс в отриманих результатах позначає, що кутова швидкість або прискорення спрямовані проти годинникової стрілки, знак мінус – за годинниковою стрілкою.
Прискорення точки В визначаємо через проекції вектора aB на координатні осі. Використовуємо векторне рівняння: aGB = aGBCn + aGτBC :
aBx =ω32lBC cos(ϕ3 +1800 ) +ε3lBC cos(ϕ3 +900 ) =
=15,032 0,15 cos(249,80 +1800 ) +81,2 0,15 cos(249,80 +900 ) = 23,1м/с; aBy =ω32lBC sin(ϕ3 +1800 ) +ε3lBC sin(ϕ3 +900 ) =
=15,032 0,15 sin(249,80 +1800 ) +81,2 0,15 sin(249,80 +900 ) = 27,6c−2 ;м/с;
|
aB = |
aBx2 |
+ aBy2 |
= |
23,12 + 27,62 =36м/с; |
||||
|
tgψB = |
aBy |
= |
27,6 |
=1,1948 ψB =50 |
0 |
|||
|
aBx |
23,1 |
|
||||||
|
|
|
|
|
|
|
|||
б) Графоаналітичний метод /1,6/. |
|
|
|
||||||
Будуємо план швидкостей механізму у відповідності до векторного |
|||||||||
рівняння: |
|
|
|
|
|
|
|
|
|
vGB =vGA + vGBA |
G |
G |
G |
|
|
G |
|
|
|
G G G |
vA + vBA =vC + vBC . |
|
|
||||||
vB =vC + vBC |
|
швидкостей відомі: vBA AB та vBC CB . Точка С |
|||||||
Напрямки відносних |
|||||||||
нерухома, отже vC =0 . |
|
|
|
|
|
|
|
||
25