Материал: FvvJHp7pSQ
6
в составе телевизионной камеры с быстродействующей стабилизацией изображения.
Глава ΙΙΙ посвящена разработке методов повышения быстродействия и точности стабилизации изображения. Приводятся подробные данные о разработанной методике синтеза телевизионных камер со стабилизацией изображения.
В диссертации был рассмотрен структурный синтез телевизионной камеры со стабилизацией изображения, показывающий, что требование совмещения изображений в реальном времени ведёт к необходимости использования прямого метода измерения смещения изображений за счет введения в
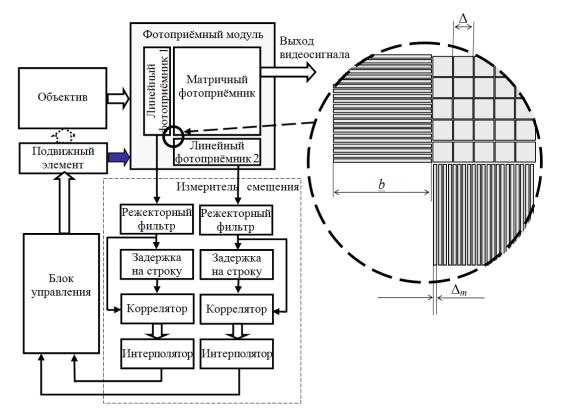
фокальную плоскость кроме основного матричного фотоприёмника двух дополнительных линейных фотоприёмников (рис. 1). При этом дополнительные линейные массивы могут быть сформированы как топологически, так и виртуально, программным способом выделения из общего массива фоточувствительных элементов. В качестве подвижного элемента целесообразно использовать современные пьезоэлектрические приводы, которые при относительно небольших размерах способны обеспечивать высокоскоростное перемещение с частотами 1кГц…1МГц и точностью позиционирования менее 0,5 нм. Оптимальная структура измерителя смещения изображений, показанного на рис. 1, включает:
Рис. 1. Функциональная схема системы стабилизации изображения с прямым измерением смещений изображений дополнительными линейными фотоприемниками
7
•режекторный фильтр для контрастирования взаимнокорреляционнной функции (ВКФ);
•коррелятор – вычислитель ВКФ для дискретных значений сдвига (на целое число пикселов);
•интерполятор – вычислитель смещения, как целочисленного относительно пикселов изображения, так и дробного (так называемая субпиксельная точность измерения).
В диссертации также рассматривается параметрический синтез входящего в систему стабилизации вычислителя, который подчинён цели достижения потенциальной точности оценки смещения изображения в системе стабилизации с дополнительными линейными фотоприёмниками при следующей опорной триаде синтеза:
1. Априорная информация о типовых изображениях, формируемых фотоприёмными массивами телекамеры:
•телекамера с кадровым периодом Tk формирует последовательность сигналов изображения основного массива N×N квадратных пикселов площадью Δ×Δ и две дополнительные последовательности yi → и yi ↑ с ортогональных линейных массивов по J пикселов каждый, с размерами b m; время считывания Tc этих строк существенно меньше времени кадра Tk основного массива: Tk>>Tc;
•диаметр импульсной характеристики объектива (функции рассеяния
точки, «кружка рассеяния») согласован с размером |
пиксела основного |
массива; |
|
• автокорреляционная функция (АКФ) оптических изображений, анализируемых линейными фотоприёмниками, при достаточно больших аргументах в силу свойств наблюдаемых сюжетов моделируется экспоненциальной функцией:
K (x) K (0)exp ( |x|/τ)
с интервалом корреляции J >> τ >> ;
• АКФ оптических изображений (до дискретизации линейными фотоприёмниками) в силу свёртки оптического сигнала с импульсной характеристикой объектива
hоб exp ( x2 / 2r2 )
с эффективным диаметром 2r, при малых аргументах x ≤ описывается не линейной функцией, а более сложной функцией.
•в первом приближении, при наличии некоторого среднего фона можно считать, что все сигналы наблюдаются в присутствии белого (некоррелированного) гауссовского шума ξi (шума фона и шума считывания), т. е. наблюдению доступны сигналы yi = Si+ ξi.
2. Критерий качества: минимум искажений сигнала изображения, формируемого основным фотоприёмным массивом, достигаемый при:
•максимально возможной частоте считывания со вспомогательных линейных фотоприёмников, которая определяется исходя из особенностей их внутренней архитектуры;
8
•минимуме среднеквадратической ошибки измерения смещения сигналов соседних строк вспомогательными линейными фотоприёмниками.
3. Ограничения: сложность вычислителя смещения изображения, стабильность вычислений, требуемые для реализации вычислителя в виде отдельной цифровой СБИС или в виде специально формируемых блоков, которые могут быть включены в состав видеосистемы на кристалле.
Варьируемыми (искомыми) параметрами являются:
•размеры пиксела измерительной строки;
•разрядность АЦП;
•число членов импульсной характеристики режекторного фильтра;
•алгоритм вычисления корреляции и его сложность;
•алгоритм интерполяции и его сложность.
В процессе нахождения размеров пиксела измерительной строки введём отношение
β = Δ/Δm
Оптимальное значение β трудно найти аналитически в связи с тем, что формально ошибка измерения смещения (с учётом интерполяции взаимнокорреляционной функции (ВКФ)) не зависит от β в силу взаимно компенсирующего влияния ёмкости пикселов Nem и их числа J в измерительной строке. Одновременно с этим, достижимая точность измерения связана с методологической ошибкой интерполяции ВКФ: чем меньше β, тем устойчивее система к отклонениям АКФ реальных сигналов от принятой модели. С других позиций, уменьшение β ведёт к возрастанию сложности вычислителя, его требуемого быстродействия и тепловыделения, а также к необходимости использования существенно более дорогостоящей технологии изготовления с лучшими топологическими нормами. Из этих соображений приходится находить компромиссное значение β, и можно прогнозировать, что оно должно лежать в интервале 2…5.
Предварительная фильтрация с помощью режекторных фильтров обеспечивает не только известное обострение ВКФ, но и уменьшение сложности накапливающего сумматора вычислителя ВКФ пропорционально log2τ/ m.
Основными требованиями к режекторному фильтру, обеспечивающему обострение ВКФ при отсутствии смещения оценки, является симметрия импульсной характеристики {hk} и равенство нулю суммы всех её членов:
k l
hk 0; h0 0; hl 0 приk l
k l
Потеря полезной информации I об измеряемом параметре сдвига связана с коэффициентом изменения отношения сигнал/шум KΨ =Kш/Ks из-за возрастания мощности шума на выходе фильтра пропорционально коэффициенту шума
k
Kш hk2
k
9
и возможного уменьшения энергии сигнала одноэлементных фрагментов и перепадов яркости, в первом приближении определяемого отношением полуширины импульсной характеристики фильтра к длительности фронта видеоимпульса
Ks = [min{l/β;1}]2.
Это означает, что в рассматриваемой системе полуширина l импульсной характеристики режекторного фильтра должна быть не менее отношения β размеров пиксела основного и вспомогательных фотоприемников.
При оценке сложности блоков вычислителя смещения изображений будем считать, что:
сложность характеризуется числом вентилей;
минимальная сложность ячейки памяти – два вентиля;
минимальная сложность полного одноразрядного сумматора 5 вентилей. При оценке сложности режекторного фильтра можно считать, что она
определяется только требуемыми элементами задержки со сложностью 4lm и 2l сумматорами со сложностью 4(m + l), так как применяется только умножение на целочисленные степени числа 2 (½, ¼, ⅛…), осуществляемое простым сдвигом кода, ведущим к увеличению разрядности кода на l. При количественной оценке параметров ниже будем полагать β = 4.
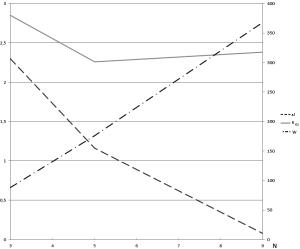
При выборе оптимальных параметров режекторного фильтра следует принимать во внимание показатель эффективности использования вычислительных ресурсов, связывающий потерю полезной информации I (в данном случае – потерю точности измерения смещения) с вычислительной сложностью фильтра W (рис. 2)
|
|
|
|
|
RI (3) C0 I C1W . |
|
|
|
|
|
|
|||
|
|
|
|
I |
|
|
|
|
|
|
W |
|
|
|
3,0 |
|
|
|
|
|
|
|
|
400 |
|||||
2,5 |
|
|
|
|
|
|
|
|
|
|
|
|
350 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2,0 |
|
|
|
|
|
|
|
|
|
|
|
|
300 |
|
|
|
|
|
|
|
|
|
|
|
|
|
250 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
1,5 |
|
|
|
|
|
|
|
|
|
|
|
|
200 |
|
1,0 |
|
|
|
|
|
|
|
|
|
|
|
|
150 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,5 |
|
|
|
|
|
|
|
|
|
|
|
|
100 |
|
|
|
|
|
|
|
|
|
|
|
|
|
50 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
3,0 |
4,0 |
5,0 |
6,0 |
7,0 |
8,0 |
N |
|
|
|||||
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 2. Зависимость потери полезной информации I (штриховая линия), сложности W (при m = 10, штрих-пунктир) и показателя
эффективности использования вычислительных ресурсов (сплошная линия) от порядка режекторного фильтра N (числа членов импульсной характеристики)
10
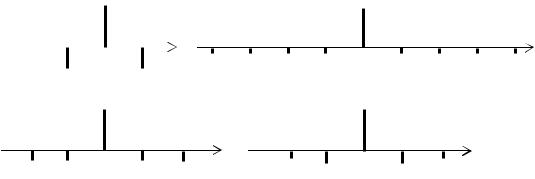
Простейшим фильтром, отвечающим поставленным условиям, является фильтр с импульсной характеристикой {h–1 = –½; h0 = 1, h1 = –½} (рис. 3а).
Kш=1,5
W=8(m+1)
а
Kш=1,25 W=16(m+1)
б
Kш=1,125 W=32(m+1,5)
г
Kш=1,266
W=16(m+2)
в
Рис. 3. Импульсные характеристики режекторных фильтров и их параметры
Этот фильтр, известный в радиолокации как череспериодный компенсатор второго порядка, рекомендуется к применению в задаче обострения ВКФ. Так как применение этого фильтра при β > 1 ведёт к заметной потере информации, то необходимо обратиться к фильтрам с большим числом членов импульсной характеристики, примеры которых показаны на рис. 3б – 3г. Эти фильтры имеют следующие импульсные характеристики:
Рис. 3б: {h–2 = h–1 = h1 = h2 = –¼; h0 = 1};
Рис. 3в: {h–1 = h1 = – 0,3125; h–2 = h2 = – 0,1875; h0 = 1};
Рис. 3г: {h–4 = h–3 = h–2 = h–1 = h1 = h2 = h3 = h4 = –⅛; h0 = 1}.
Фильтр на рисунке 3в является оптимальным для обнаружения одноэлементных сигналов на фоне с экспоненциальной АКФ, хотя и требует несколько больших вычислительных затрат.
Таким образом, наблюдается уменьшение потери информации о смещении изображения ценой увеличения сложности фильтра. Весовые коэффициенты при этих величинах следует определять с учётом сложности остальной части вычислителя, для широкого диапазона значений которых при выбранном значении β = 4 наилучший компромисс между точностью и сложностью обеспечивает фильтр с импульсной характеристикой, показанной на рис. 3г.
При параметрическом синтезе измерителя смещения изображений важен вопрос: какова потеря информации о параметре сдвига χ из-за равномерного, оптимального с точки зрения информационного риска квантования. Для видеосистемы на кристалле, построенной по рассматриваемому принципу, площадь пиксела измерительной строки на два порядка превосходит площадь пиксела основного фотоприёмного массива, что соответствует ёмкости пиксела Nеm = 106 электронов и более.
Для такой ёмкости пиксела среднее значение дисперсии флуктуационного шума составляет Nem/2, а оптимальное при оценке формы сигнала равномерное квантование требует числа разрядов
mo ≈½log(2NemlogNem) = 12.