Материал: 847
35
ного тока совмещены, что позволяет экономить обмоточный материал примерно на 40%. Такие МЭ называют дросселями насыщения с совмещенными обмотками (ДНС).
МДС, создаваемая обмотками за счет постоянных токов, подмагничивает магнитопровод, изменяя магнитную проницаемость μa и тем самым — индуктивность ДН или ДНС. Можно эту
индуктивность изменять плавно, регулируя постоянный ток подмагничивания.
Магнитопроводы дросселей насыщения не выполняются с немагнитными зазорами, чтобы не уменьшать максимально возможную индуктивность без подмагничивания. Для ДН и ДНС всегда выполняется тождество:
I1ср W1 = Id Wd , |
(2.3.1) |
где W1 , Wd — числовитковобмотокпервичнойиподмагничивания, I1cp , Id — средние значения токов обмоток W1 , Wd .
Условие (2.3.1) сохраняется пока постоянная составляющая индукции B0 меньше индукции насыщения BS .
При B0 > BS дроссель насыщения становится неуправляе-
мым, сопротивление цепи обмоток переменного тока определяется при этом величиной омического сопротивления обмоток RД и
индуктивным их сопротивлением X ДО при магнитной проницаемости насыщенного ДН μa = μ0 .
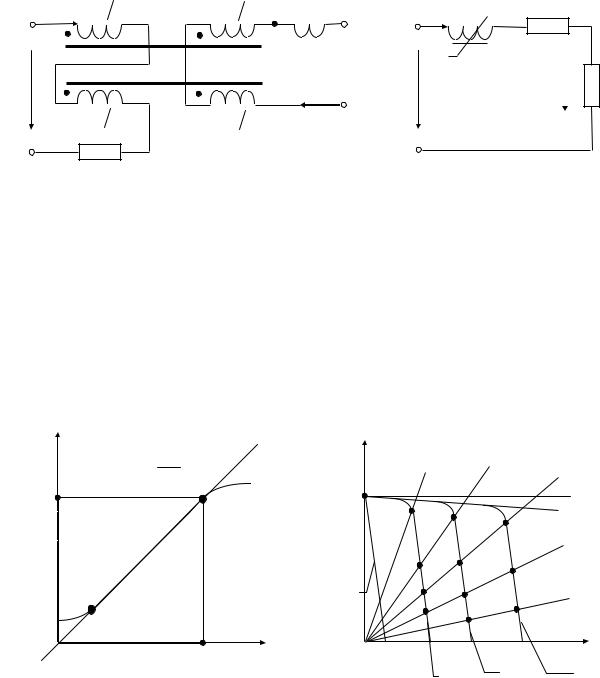
На рис. 2.3.1, б показана схема замещения одной фазы ДН любого типоисполнения. Здесь обозначено: ХД — индуктивное
сопротивление, регулируемое током подмагничивания Id , от максимального значения ХДМ при Id = 0 до минимального ХДО при
Id = Idн (номинальный); |
RД — активное сопротивление обмо- |
||||
|
|
2 |
|
|
|
ток дросселя, RД = R1 + Rd |
|
W1 |
|
; |
Rн — активное сопротивле- |
|
|||||
|
|
||||
|
Wd |
|
|
|
|
ние нагрузки.
|
|
36 |
|
|
|
|
|
I1 W1 2 |
W d 2 |
ДФ |
− |
I1 |
|
|
|
|
|
− − |
|
R Д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Х Д |
|
|
|
U1 |
|
I d + |
U1 |
U н |
|
Rн |
|
W1 2 |
W d 2 |
|
|
|
|
|
|
Rн |
|
|
|
|
|
|
|
а |
|
|
|
б |
|
|
|
|
|
Рис. 2.3.1 |
|
|
|
||
На рис. 2.3.2 показаны главные статические характеристики |
|||||||
ДН и ДНС: а — регулировочная |
I1 = f (Id ), б |
— внешняя |
|||||
Uн = ϕ(I1 ). |
|
|
|
|
|
|
|
Значения I1, Uн берутся в эффективных или средних значе- |
|||||||
ниях по необходимости. |
|
|
|
|
|
|
|
I1W 1 |
|
|
Uн |
|
|
|
|
Rн = Uн |
B |
|
Rн4 |
R н3 |
R |
н2 |
|
Iн |
|
|
|
|
|
||
I1нW 1 |
|
|
U1 |
3 |
|
Rн1 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
||
|
|
|
|
2 |
|
Rн = 0 |
|
A |
|
I d |
= 0 |
1 |
|
||
|
|
|
|
|
|
|
|
|
I dW d |
|
|
0 |
|
|
|
|
|
|
|
|
|
I1 |
|
0 |
I dнW d |
|
|
0 |
|
|
|
|
|
I d2 |
|
I d3 |
|||
a |
|
|
|
I d1 |
|
||
|
Idн > Id 2 > Id1 > 0 |
|
Rн4 > Rн3 > Rн2 > Rн1 > 0 |
Рис. 2.3.2 |
б |
|
Регулировочная характеристика рис. 2.3.2, а показывает связь переменного тока I1 (в эффективных или средних значениях) с током подмагничивания Id
37
I1 = Id |
|
Wd |
. |
(2.3.2) |
|
||||
|
|
W |
|
|
|
1 |
|
|
|
В пределах линейного участка кривой намагничивания магнитопровода B = μa H зависимость тока нагрузки (он же входной
ток I1) от тока подмагничивания Id строго пропорциональна и не зависит от сопротивления нагрузки Rн — см. на рис. 2.3.2, а уча-
сток между точками А и В. Это позволяет получить внешние характеристики регулируемого источника тока (рис. 2.3.2, б). Установленный током подмагничивания ток нагрузки является довольно стабильным при изменяющемся сопротивлении Rн (см.
точки 0, 1, 2, 3). Регуляторам тока на дросселях насыщения не опасны короткие замыкания и холостой ход. Такие свойства в электронных устройствах без ДН не достигаются, что обуславливает в настоящее время применение дросселей насыщения как регуляторов тока, несмотря на их недостатки: большой вес и объем на единицу мощности, инерционность при управлении.
Регуляторы тока на базе ДН и ДНС хорошо описаны в [10].
2.4 Магнитные усилители
Варианты однофазных схем включения МЭ, обеспечивающие функции магнитных усилителей (МУ) входных сигналов и регуляторов напряжения показаны на рис. 2.1.2, д, е. С другими схемами можно познакомиться в [15 и др.]. Отличается МУ от дросселя насыщения наличием положительной обратной связи по току. Эта связь может быть внешней (рис. 2.1.2, д), или внутренней (рис. 2.1.2, е). Ток положительной обратной связи является выпрямленным током первичной обмотки МЭ. Магнитодвижущая сила обмотки обратной связи Woc Ioc выполняет те же функ-
ции, что МДС обмотки подмагничивания ДН, но МДС обратной связи автоматически отслеживает МДС рабочей (первичной) обмотки переменного тока МЭ. Если витки обмоток W1 и Woc оди-
наковы (на рис. 2.1.2, е они совмещены и это условие обязательно выполняется), то магнитопровод МЭ насыщен и магнитный элемент становится неуправляемым, если его не размагничивать за
38
счет МДС специальных управляющих обмоток (на рис. 2.1.2, д, е они обозначены Wy и Wсм ).
|
Iн |
Uн |
|
Rн1 > R н2 > Rн3 |
|
|
Iн н |
|
|
|
|
1 |
2 |
U1 |
|
I yн |
|
|
|
I y1 |
|
||
|
|
|
|
|
|
Iн о |
|
I y = 0 |
|
I y2 |
|
|
0 |
|
Rн4 |
|
|
|
W yI y |
|
I y3 |
||
Wс м Iс м W yI yн |
|
0 |
I |
н |
|
|
Iн о |
|
|||
|
|
|
|
|
|
а |
б |
|
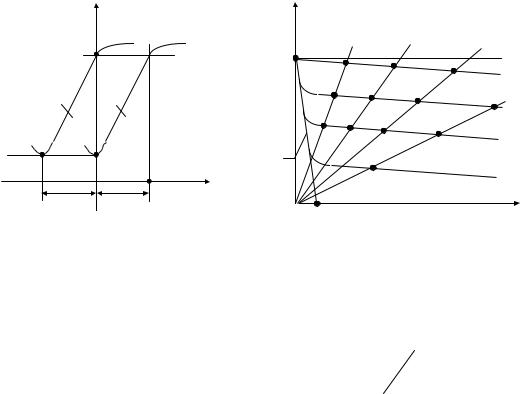
Рис. 2.4.1
На рис. 2.4.1, а показаны регулировочные характеристики МУ при коэффициенте обратной связи Koc = Woc W1 = 1. Характе-
ристика 1 соответствует случаю, когда нет смещающих МДС; характеристика 2 смещена вправо за счет МДС обмотки смещения Iсм Wсм и ток нагрузки на ней регулируется ампервитками об-
мотки управления Wy .
У магнитных усилителей основная МДС подмагничивания обеспечивается обратной связью, поэтому обмоткам Wсм и Wу
остается создавать МДС, определяемую шириной петли гистерезиса кривой намагничивания. При высококачественных ферроматериалах магнитопровода МУ, например, пермаллое или феррите, имеющих очень малые потери при намагничивании,ток сигналов управляющих обмоток будет в 1000 и более раз меньше регулируемых токов на выходе. Такие коэффициенты усиления в электронных устройствах без каскадов предварительного усиления
получить не удается.
Обеспечивая МУ хорошие усилительные свойства, положительная обратная связь по току дает и отрицательный результат своего применения, так как в отличие от ДН, являющегося отлич-
39
ным регулятором тока, магнитный усилитель становится регулятором напряжения с внешними характеристиками, приведенными на рис. 2.4.1, б. Такие же характеристики обеспечиваются электронными элементами, например, транзисторами и тиристорами, которые по сравнению с МУ являются безынерционными, малогабаритными и явно меньшими по весу. Магнитные усилители всегда уверенно уступают электронным устройствам, если выполняются функции регулятора напряжения.
Применение МУ в электронных устройствах целесообразно лишь в цепях управления с функциями предусиления и гальванической развязки. Возможность выполнить у МУ любое необходимое количество управляющих обмоток позволяет электрически развязывать большое количество управляющих сигналов.
2.5 Умножители частоты
Примеры схем МЭ, позволяющих умножить частоту входного напряжения или тока показаны на рис. 2.1.3, в — утроитель, и 2.1.3, г — удвоитель.
Если у трех МЭ первичные обмотки соединить по схеме «звезда», а вторичные по схеме «треугольник», и кривую намагничивания магнитопроводов сделать сильно нелинейной за счет подмагничивания постоянным током через вторичные обмотки, то в последних появятся гармоники напряжения, кратные трем. Самой сильной будет третья гармоника. Ее можно хорошо выделить в сопротивлении нагрузки, подключив эту нагрузку в разрыв треугольника через конденсатор. В схеме на рис. 2.1.3, г, выполненной на двух МЭ, вторичные обмотки включены встречно. Нелинейность кривой намагничивания магнитопроводов, обусловленная их подмагничиванием постоянным током через вторичные обмотки, приведет к появлению в замкнутой вторичной цепи гармоник потока, кратных двум. Самой сильной будет вторая гармоника.
Таким образом, в схеме на рис. 2.1.3, в ток нагрузки имеет значение частоты в 3 раза большее частоты напряжения первичных обмоток, а в схеме на рис. 2.1.3, г частота тока нагрузки в 2 раза больше первичной. Эффективно избирать нужную частоту гармоник позволяют подобранные (рассчитанные) параметры