Материал: 680
4. ЛИНЕАРИЗАЦИЯ НСХ ПРЕОБРАЗОВАТЕЛЯ
Для достижения требуемой точности преобразования используют линеаризацию НСХ термопреобразователя. На практике широкое распространение получил метод линеаризации с помощью кусочно- Слинейной аппроксимации. В этом методе исходную функцию представляют ломанной кривой, уменьшая тем самым число точек характерист ки, значен е которых необходимо держать в памяти вычислительного устройства, соответственно при этом уменьшаются требования к выч сл тельному устройству, что удешевляет стоимость всей
системы упрощает ее.
Мы также удем спользовать метод кусочно-линейной аппроксимац . Для этого разделим исходную НСХ термопреобразователя на несколько участков, в каждом из которых НСХ представляется прямым отрезком, соед няющим крайние точки характеристики НСХ.
В первом пр |
л |
|
число необходимых участков линеари- |
||
жении |
|
|
|
||
зации можно определ ть по формуле (5) |
|
|
|||
|
|
N уч , |
|
(5) |
|
|
|
|
|
|
|
б |
– максимальная погреш- |
||||
где Nуч – число участков линеаризации; |
|||||
ность линеаризации |
|
(%), – требуемая |
точность преобразования |
||
(0,2). |
А |
|
|||
Итак, |
|
||||
N |
|
||||
уч |
= 1,53/0,2 = 7,65 8 участков. |
|
|||
Таким образом, в первом приближенииД, для соответствия преобразователя классу точности 0,25, исходную НСХ термопреобразователя необходимо разделить на 8 участков. И
При таком числе участков кусочно-линейная аппроксимация неэффективна, а использование ПЗУ для прямого преобразования выходного кода АЦП в значение температуры позволяет просто реализовать соответствие преобразователя классу точности 0,25 для диапазона температур от 600 до 1100°С.
Значение требуемой емкости ПЗУ найдем по формуле:
M 2N d 214 2 32768 байта 32 Кбайта
где 2N – число входных значений для ПЗУ; N - разрядность входных данных с АЦП; d – длина кода АЦП (в байтах).
В нашем случае N=14 разрядов, длина выходного кода d=2байта
(14бит/8бит).
11
5. ВЫБОР И ОБОСНОВАНИЕ ПРИНЦИПА РАБОТЫ УЗЛА АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ
По существу аналого-цифровые преобразователи либо преобразуют аналоговый входной сигнал (напряжение или ток) в частоту или последовательность импульсов, длительность которой измеряют для обеспечения отображающего цифрового сигнала, либо, чтобы полу-
чить ц фровой выходной сигнал, |
сравнивают входной сигнал с пере- |
|||
менным опорным с гналом, используя внутренний ЦАП. |
||||
уществует |
ведущих способа преобразования, основанных |
|||
на пр нц пе |
змерен я временного интервала: преобразование на- |
|||
С |
|
|
||
пряжен я в частоту, метод с пилообразным напряжением и метод ли- |
||||
нейного |
нтегр рован я. На методе сравнения основываются схемы |
|||
последовательного пр |
лижения, параллельные и модифицированные |
|||
параллельные схемы. |
|
|
||
В основном находят применение 2 основных типа АЦП: двух- |
||||
три |
ЦП последовательного приближе- |
|||
тактный |
нтегр рующ й АЦП и |
|||
ния. Каждый |
з н х прео разовывает входное напряжение в цифро- |
|||
вой код, пропорциональный входному напряжению. |
||||
При |
|
принципа ра оты узла аналого-цифрового преобра- |
||
|
выборе |
|||
зования будем учитывать следующие факторы: |
||||
- точность прео разования; |
|
|||
- скорость преобразования; |
|
|||
- стабильность точностных характеристик преобразователя во |
||||
времени; |
|
А |
||
- стоимость преобразователяД; - гальваническое разделение входных и выходных цепей. Рассмотрим все эти факторы:
1) из задания известно, что время реакции датчика на изменение
температуры составляет более 10 секунд – можем применить низко- |
|
скоростной АЦП; |
И |
2)требования к точности преобразования – 14 разрядный АЦП;
3)стоимость преобразователя – как можно дешевле;
4)стабильность точностных характеристик преобразователя во времени – с течением времени преобразователь должен обеспечивать высокое качество преобразования без необходимости частой калибровки потребителем;
12
5) практически все АЦП позволяют реализовать гальваническое разделение между входными и выходными цепями, различия будут лишь в технической реализации и стоимости выбранного решения.
Этим требованиям отвечают интегрирующие АЦП, которые имеют дополнительные преимущества по сравнению с АЦП последо- Свательного приближения: минимальное число необходимых точных компонентов, высокую помехоустойчивость, отсутствие дифференци-
альной нел нейности, низкую стоимость.
Недостатком так х АЦП является большое время преобразова- ния, обусловленное пр вязкой периода интегрирования к длительности пер ода п тающей сети. В нашем случае требования по быстродейств ю АЦП позволяют применить данный вид АЦП.
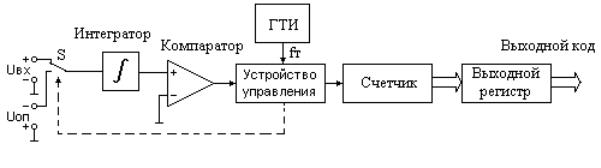
б Рисунок 3. УпрощеннаяАсхема двухтактного интегрирующего АЦП
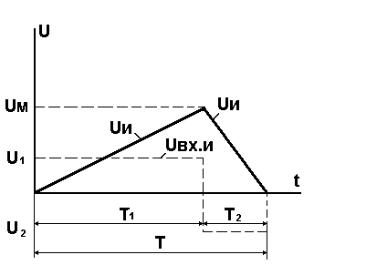
Рассмотрим принцип работыДдвухтактного интегрирующего АЦП. В первом такте цикла преобразования производится интегрирование – накопление интеграла от некоторого входного сигнала, а затем во втором также выполняется операция «разинтегрирования» - считывание накопленного интеграла путем подачи на вход интегратора другого входного сигнала (опорного). Ииаграмма изменения напряжения Uи на выходе неинвертирующего интегратора при реализации принципа двухтактного интегрирования показана на рис. 4. В первом такте длительностью Т1 напряжение Uи изменяется от некоторого начального уровня (в частном случае от нуля) до значения Uм. Во втором такте длительностью Т2 происходит обратное изменение Uи – от Uм до исходного уровня. Накопление интеграла (в течение Т1) происходит при подаче на вход интегратора напряжения Uвх.и = U1, а считывание (Т2) – при подаче напряжения Uвх.и = U2.
13
С |
|
|
|
ращение |
|
|
|
Р с. 4. Д аграмма |
зменения интеграла при реализации принципа |
||
|
двухтактного интегрирования |
||
б |
|||
Суммарное пр |
|
интеграла за цикл интегрирования рав- |
|
но нулю, поэтому можно записать |
|||
|
U1T1 |
U2T2 |
|
|
------ + ------- =0, |
||
А |
|||
|
τ |
|
τ |
где τ – постоянная времени интегратора.
Отсюда видно, что напряжения U1 и U2 должны иметь различную полярность, а соотношение длительностей тактов определяется
равенством T2/T1 |
= - U1/U2. |
Д |
Задача построения точного цифрового измерителя длительности |
||
импульсов решается просто: производят подсчет импульсов известной частоты, заполняющих измеряемый промежуток времени. В интегрирующем преобразователе этого типа не важны стабильность частоты генератора импульсов, если исходить из того, что она остается постоянной за время преобразования, и стабильностьИ«постоянной времени» интегратора. Выбирая время интегрирования равным одному или нескольким периодам сигнала помехи, помеху можно исключить. Двухтактный интегрирующий АЦП применяется до 14разрядной точности и обеспечивает высокое подавление помех и превосходную стабильность, как во времени, так и по температуре.
Выбор длительности интегрирования входного сигнала Uвх обуславливается подавлением высокочастотных помех и исключением влияние сетевых помех на точность преобразования (интеграл от синусоидального напряжения в интервале, кратном периоду изменения синусоиды равен нулю).
14
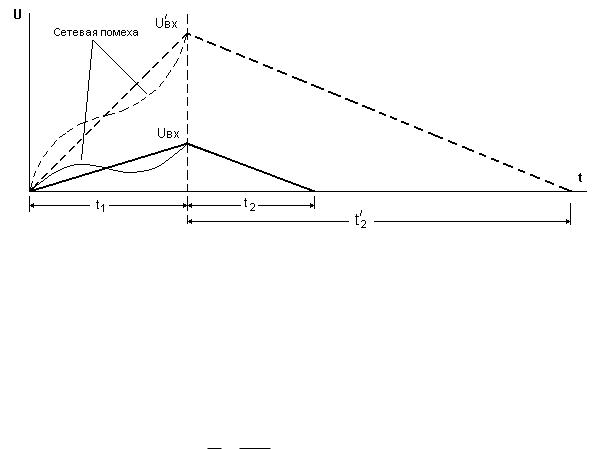
СиР сунок 5. Д аграммы ра оты двухтактного интегрирующего АЦП
6. ОПРЕДЕЛЕНИЕ ВРЕМЕНИ ПРЕОБРАЗОВАНИЯ ИЗМЕРИТЕЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ
В двухтактном |
нтегрирующем ЦП соотношение длительно- |
||||
|
А |
||||
стей тактов определяется равенством: |
|||||
|
t2 |
U ВХ |
4,5108 |
|
|
б |
|
1,80432 |
|||
|
t1 |
UОП |
2,5 |
|
|
В нашем случае Uвх примем равным 4,5108 В (усилитель дол- |
|||||
жен усиливать входной сигнал с датчика в 100 раз), Uоп – 2,5 В как |
|||||
|
|
|
Д |
||
наиболее часто используемое опорное напряжение в современных |
|||||
схемах и самое простое в исполнении. |
|||||
Тогда время разряда t2 t1 |
1,80432 , и общее время преобразования |
||||
АЦП: |
|
t1 1 1,80432 t1 2,80432 |
|||
t |
t1 t2 |
||||
Время интегрирования входного напряженияИUвх установим кратным периоду сетевой помехи и равным t1 = 640 мс.
Таким образом, максимальное время преобразования измерительного преобразователя будет равно:
t t1 2,80432 0,640 2,80432 1,8с
Время реакции датчика на изменение температуры – не более 10 секунд, в нашем случае максимальное время преобразования равно 1,8 секунд, что меньше.
15