Материал: 4uKoYzHCP0
тельности к магнитному полю, лежащую в плоскости резонатора КЛ. При вращении КЛ ось чувствительности меняет свою ориентацию относительно силовых линий магнитного поля, что приводит к систематической (при условии постоянства магнитного поля) погрешности на первой гармонике (при условии однородности магнитного поля) частоты вращения. Эллиптичность поляризации встречных волн создает условия для проявления эффекта Фарадея на пассивных элементах резонатора. Особенно существенно сказывается действие магнитного поля в случае, когда кольцевой резонатор содержит в качестве отражателей призмы полного внутреннего отражения. Попарно симметричное расположение призм, реализуемое в конструкции КЛ, в идеале должно обеспечивать взаимную компенсацию влияния на них внешнего магнитного поля. Однако реально всегда существуют отклонения в расположении призм, приводящие к неполной компенсации.
Систематическая погрешность КЛ, вызванная влиянием магнитного поля и сосредоточенная на первой гармонике частоты вращения, может быть устранена реверсивным методом. В связи с тем, что систематическая погрешность ОДУ и КЛ имеет различную природу, появляется возможность ее определения и устранения.
Рассмотрим реверсивный метод в лазерной гониометрии. Систематическая погрешность измерения угла поворота шпинделя ДГ в основном складывается из погрешностей ОДУ и КЛ. При вращении шпинделя «по» и «против» часовой стрелки систематическую погрешность ДГ представим в виде:
|
|
|
(ϕ |
i |
) = |
ОДУ |
(ϕ |
) + |
КЛ |
(ϕ |
) |
|
||||
|
|
|
|
|
|
|
i |
|
|
|
i |
|
(6) |
|||
|
|
|
(ϕ |
|
|
) = |
|
|
(ϕ |
|
) + |
|
|
(ϕ |
|
|
|
|
|
j |
ОДУ |
j |
КЛ |
j |
), |
||||||||
|
|
|
|
|
|
|
|
|
||||||||
где ОДУ |
(ϕi ), |
ОДУ |
(ϕ j ), |
систематическая погрешность ОДУ при вра- |
||||||||||||
|
|
|
|
− |
||||||||||||
щении «по» и |
«против» часовой |
стрелки |
|
соответственно; КЛ (ϕi ) , |
||||||||||||
КЛ(ϕ j ) − систематическая погрешность КЛ, при вращении «по» и «про-
тив» часовой стрелки соответственно; ϕi , ϕ j − угол поворота шпинделя ДГ, отсчитанный от нулевой метки при вращении «против» и «по» часовой стрелке соответственно.
Систематическая погрешность ОДУ понимается как отклонение действительного значения угла от его номинального значения:
11

|
ОДУ(ϕi ) = ϕiд − ϕiн |
|
|
|
(7) |
|
ОДУ(ϕ j ) = ϕ jд − ϕ jн, |
|
где ϕiд, ϕ jд – действительный угол ОДУ, отсчитанный в выбранном направ-
лении вращения; ϕiн = i(2π K ) , ϕ jн = j(2π
K ) , ϕ jн = j(2π K ) − номинальный угол ОДУ;
K ) − номинальный угол ОДУ;
2π − дискретность отсчета ОДУ, K − количество штрихов шкалы ОДУ.
K
При этом, из-за существования естественного эталона угла 2π радиан,
выполняются следующие соотношения: |
|
ϕiд + ϕ jд = 2π |
(8) |
j +i = K. |
(9) |
Из выражений (7), (8) и (9) следует, что при вращении «по» и «против» |
|
часовой стрелки систематическая погрешность ОДУ отличается знаком: |
|
ОДУ (ϕi ) = − ОДУ (ϕ N − j ) . |
(10) |
Систематическая погрешность КЛ понимается как неравномерность его шкалы и в основном сосредоточена на первой гармонике частоты его вращения. При вращении КЛ «против» и «по» часовой стрелке зависимость систематической погрешности от угла поворота имеет вид:
КЛ (ϕi , T ) = A(T ) cos(− ϕi + ϕ0 ) ; |
(11) |
КЛ(ϕ j , T ) = A(T ) cos(ϕ j + ϕ0 ) , |
(12) |
где КЛ(ϕi, j , T ) − систематическая погрешность КЛ при вращении «про-
тив» и «по» часовой стрелке соответственно; A − амплитуда первой гармони-
ки систематической погрешности КЛ; |
ϕ0 − начальная фаза систематической |
|
погрешности КЛ; T – период оборота. |
|
|
При этом амплитуда зависит от значения внешнего магнитного поля и ско- |
||
рости вращения КЛ, а начальная фаза − |
от ориентации КЛ в магнитном поле. |
|
Тогда из выражений (8), (11) и (12) следует: |
|
|
КЛ(ϕi , T ) = |
КЛ(ϕK − j , T ) . |
(13) |
12
Таким образом, систематическая погрешность КЛ не зависит (13), а систематическая погрешность ОДУ зависит от выбранного направления вращения (10). Эти свойства ложатся в основу реверсивного метода.
Из системы (6) с учетом (10), (11) получим выражения для определения систематической погрешности КЛ и ОДУ:
КЛ (ϕi ,T ) = |
(ϕi ) − (− (ϕK − j )) |
(14) |
|||
2 |
|
|
|||
|
|
|
|
|
|
ОДУ (ϕi ) = |
|
(ϕi ) + (− (ϕK − j )) |
|
||
|
|
. |
(15) |
||
|
2 |
||||
|
|
|
|
|
|
Для исключения систематической погрешности КЛ реверсивным методом необходимо:
1)провести измерения углов поворота шпинделя ДГ при его вращении «по» и «против» часовой стрелки;
2)найти систематическую погрешность ДГ при вращении «по» и «про-
тив» часовой стрелки (ϕi ) , (ϕK − j ) ;
3) провести преобразование (ϕ j ) → − (ϕK − j ) ;
4) найти систематическую погрешность ОДУ согласно выражению (15). В ЛДГ для калибровки МП не реализована возможность реверсивного вращения. В нем для устранения систематических погрешностей КЛ и НИ,
сосредоточенных на первой гармонике частоты вращения, применяют метод кросс-калибровки, основанный на существовании естественного эталона 2π
радиан.
Сумма смежных центральных углов МП составляет 360 и сумма по-
грешностей, измеренных на полном круге, должна равняться нулю. При кросс-калибровке происходит поэтапная калибровка шкалы одного преоб-
разователя угла относительно другого.
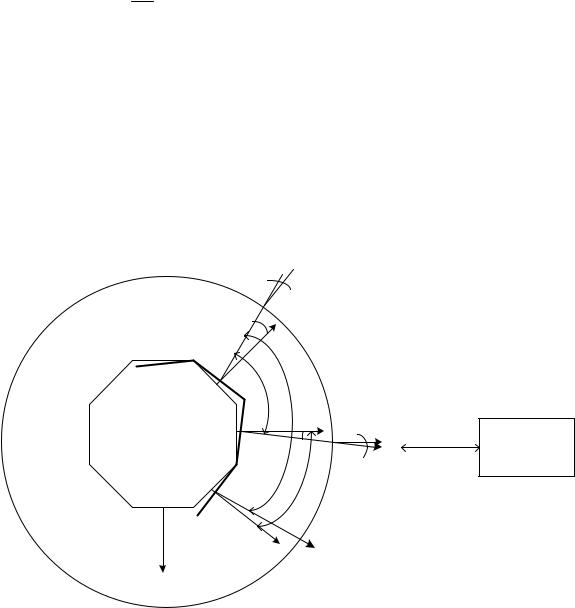
Рассмотрим метод кросс-калибровки при измерении полного угла МП.
На рис. В.3 представлено схематическое изображение МП на платформе ЛДГ, на примере которого показаны нормали идеальной и реальной МП.
Основная задача калибровки МП заключается в определении углов между этими нормалями.
Как отмечалось ранее, при совпадении нормали к грани МП и оптиче-
ской оси НИ осуществляется считывание с угловой шкалы КЛ. Таким обра-
13
зом, результат измерения углов между гранями МП лазерным динамическим
гониометром запишется в виде:
ϕi = i 2π + (bi +1 − b1) + (a1+i − ai ) , i = 1, 2, ..., P −1,
P
где ϕi − угол между i -ой и первой гранями МП; bi − угол между нормалями идеальной и реальной МП; ai − погрешность угловой шкалы, которая харак-
теризует отклонение угловой шкалы КЛ от идеальной (равномерной); P – количество граней МП.
Систематическая погрешность измерения углов МП равна
i |
= ϕ |
i |
− i |
2π |
= (b |
− b ) + (a |
− a ) |
|
|
||||||||
|
|
P |
i +1 |
1 |
1+i |
i |
||
|
|
|
|
|
|
|
|
|
и содержит комбинации погрешностей КЛ и МП.

 b1
b1
КЛ a1
N
1ϕ1
|
a2 |
b2 |
МП |
2 |
|
|
|
ϕ2
3
360°/p
(17)
НИ
Рис. В.3. Блок-схема измерений многогранной призмы в методе кросс-калибровки
После каждого этапа калибровки выполняется разворот МП относи-
тельно КЛ на угол 360°/ p, где p – число этапов кросс-калибровки.
В результате получается массив данных, обработка которого позволяет получить систематические составляющие погрешностей МП и ЛДГ, вклю-
чая погрешности КЛ и НИ. Важным фактором процедуры кросс-калибровки является число p разворотов (или минимальный угол разворота 360°/p).
14
Максимальной гармоникой систематической погрешности, которую можно определить с помощью кросс-калибровки, является p/2-я гармоника.
Для выделения систематической погрешности ЛДГ необходимо вы-
полнить процедуру кросс-калибровки, которая в данном случае заключа-
ется в измерении углов МП, когда она последовательно занимает положе-
ния относительно КЛ, которые отличаются на угол 2π P . Пусть МП после-
P . Пусть МП после-
довательно разворачивается против часовой стрелки на угол 2π P . Результат
P . Результат
измерений ЛДГ в P положениях МП ( |
|
ki ) имеет вид: |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
ki = (bi+1 |
− b1) + (ak +i |
− ak ), |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
kP = 0, |
|
|
|
|
|
|
|
|
(18) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где k – номер положения МП, k = 1, 2, …, |
P. |
|
||||||||||||||||||||
|
Решая систему уравнений (18) с учетом очевидных соотношений: |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
|
|
|
|
P |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
∑ ai |
= |
0 и ∑bi = 0 , |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
i =1 |
|
|
|
|
|
i =1 |
|
||
находим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
bi |
= |
|
|
i − |
|
|
|
|
|
|
|
|
1 |
P |
|
|
|
|
1 |
P |
|
|
|
|
, |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
где |
|
i = |
∑ ki , |
|
|
|
= |
∑ |
|
i . |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
P k =1 |
|
|
|
P i =1 |
|
|
|
|
|
|
|
|
|
|
|||||
При калибровке МП с помощью ЛДГ нет необходимости проводить измерения в P положениях МП, так как при калибровке МП для устране-
ния погрешности, обусловленной неравномерностью угловой шкалы КЛ на первой гармонике, достаточно провести измерения при ее разворотах на 180о.
При калибровке МП в ее 4-х положениях, отличающихся на 90о, по-
грешность неравномерности угловой шкалы ЛДГ устраняется полностью.
15