Материал: 4uKoYzHCP0
|
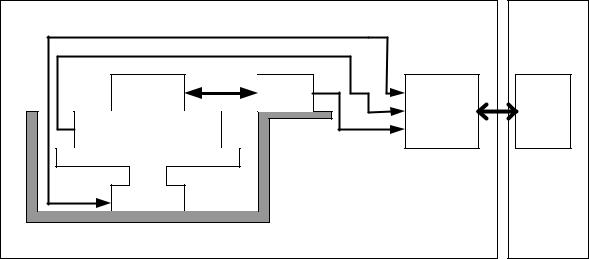
В.1. Структурная схема лазерного динамического гониометра |
Структурная схема ЛДГ, применяемого для калибровки многогранных |
|
призм, представлена на рис. В.1. |
|
|
Рис. В.1. Структурная схема лазерного динамического гониометра: |
I – |
аппаратная часть; II – вычислительная часть;1 – кольцевой лазер; 2 – поворотная |
|
платформа; 3 – привод; 4 – многогранная призма; 5 – нуль-индикатор; |
|
6 – блок электроники; 7 – персональный компьютер |
Аппаратная часть ЛДГ обеспечивает получение сигнала с КЛ, формирование интервалов суммирования сигналов с КЛ и передачу информации в персональный компьютер. Вычислительная часть осуществляет обработку полученной информации, вывод и хранение результатов обработки.
Поворотная платформа приводится в движение приводом. На оси вращения платформы закреплены КЛ и МП. НИ вырабатывает импульсы в моменты времени, когда очередная грань МП перпендикулярна его световому пучку.
Блок электроники содержит систему управления двигателем, формирователи сигналов, специализированную плату счетчиков, интегрирующую сигнал КЛ в пределах временных интервалов, задаваемых НИ, и передающую данные персональному компьютеру.
В ЛДГ для калибровки МП необходимую фиксацию ее положения в условиях ее непрерывного вращения обеспечивают нуль-индикаторы НИ.
НИ представляет собой двухлучевой интерферометр Тваймана– Грина со светоделительной призмой (призмы типа Дове, Кестерса, Уолша) реги-
страции интерференционной картины фотоприемником. С выхода НИ в
6
момент совпадения его визирной оси с нормалью к отражающей поверхности
(грани многогранной призмы), вращающейся на поворотной платформе,
снимается импульсный сигнал, форма которого определяется типом НИ.
При измерениях углов МП НИ вносит свою погрешность, которая со-
средоточена на первой гармонике частоты вращения и вызвана в основном наклоном измерительной плоскости НИ.
КЛ применяется в качестве угловой шкалы сверхвысокого разреше-
ния. Обычно в гониометрии используется кольцевой гелий-неоновый лазер типа ГЛ-1. Он выполнен в виде моноблочной конструкции с четырьмя призмами полного внутреннего отражения. КЛ генерирует две распростра-
няющиеся навстречу друг другу световые волны с λ = 0,63 мкм.
Как отмечалось ранее, использование КЛ в качестве эталонной круго-
вой шкалы позволяет строить высокоточные ЛДГ, единственным недостат-
ком которых является ограниченный динамический диапазон работы КЛ
(60°/c−360°/c), в котором обеспечиваются его точностные характеристики.
Для круга задач, связанных с аттестацией преобразователей угла,
необходимы гониометры более широкого динамического диапазона, где в качестве образцовой круговой шкалы используются оптические датчики угла.
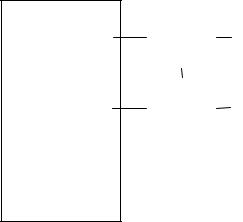
В.2. Структурная схема высокоточного динамического гониометра
Схема высокоточного ДГ представлена на рис. В.2.
На шпинделе ДГ, вращающемся в подшипниках, закреплены ОДУ и КЛ. Шпиндель приводится во вращение приводом, состоящим из двигате-
ля и системы управления двигателем. Измерение угла поворота шпинделя ДГ кольцевым лазером происходит в моменты времени, сформированные оптическим датчиком угла. Выходные сигналы с ОДУ и КЛ поступают в блок электроники, осуществляющий предварительную обработку данных и передачу их в персональный компьютер.
Построение ДГ, использующее принцип комплексирования двух пре-
образователей угла – КЛ и ОДУ, в основу которых положены принципи-
ально различные физические эффекты, позволяет проводить угловые изме-
рения как в широком диапазоне скоростей вращения, так и статике, а так-
же определять характеристики обоих преобразователей.
7
Построение |
ДГ, использую- |
|
|
|
|
|
|
|
|
|
|
|
|
7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
щее |
принцип комплексирования |
|
|
|
|
1 |
|
|
|
|
|
5 |
||||
|
|
|
|
|
|
|
|
|
|
|||||||
двух преобразователей угла – КЛ и |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
ОДУ, в основу которых положены |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
3 |
|
|
|
|
|
|
|
6 |
|
|
|
|||
принципиально различные физиче- |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
ские эффекты, позволяет прово- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
дить угловые измерения как в ши- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|||
роком диапазоне скоростей враще- |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||||
ния, так и статике, а также опреде- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
лять характеристики обоих преоб- |
|
Рис. В.2. Структурная схема высокоточного |
||||||||||||||
разователей. |
|
|
динамического гониометра: 1 – оптический |
|||||||||||||
Наибольшей |
точностью обла- |
датчик угла; 2 – |
шпиндель; 3 – двигатель; 4 – |
|||||||||||||
дают инкрементные ОДУ. Они со- |
|
|
кольцевой лазер; 5 – блок электроники; |
|||||||||||||
стоят |
из измерительной решeтки, |
|
|
|
6 – система управления двигателем; |
|||||||||||
|
|
|
|
7 – персональный компьютер |
||||||||||||
располагающейся на роторе ДГ, |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
одной или нескольких считывающих головок с индикаторными решетками и головки нулевой метки, расположенных на неподвижной части гониометра.
При угловом перемещении измерительной решетки относительно индикаторной модулируется световой поток, который в дальнейшем преобразуется в электрические синусоидальные сигналы. Число периодов сигналов пропорционально измеряемому угловому перемещению.
Систематическая погрешность ОДУ определяется погрешностями его изготовления и установки (эксцентриситет установки измерительной решетки, тангенциальный и радиальный сдвиги, погрешность от параллакса).
В.3. Принцип работы и методы измерений
КЛ вращается с квазипостоянной частотой вместе с МП (в случае ЛДГ для калибровки многогранных призм) или вместе с ОДУ (в случае высокоточного динамического гониометра).
При вращении КЛ частота выходного сигнала пропорциональна его угловой скорости:
n(t) = k × w(t) , |
(1) |
где k − масштабный коэффициент КЛ.
В процессе угловых измерений периоды выходного сигнала КЛ интегрируются в пределах интервалов времени, сформированных выходными импульсами НИ или ОДУ. Интегрирование выражения (1) дает число пе-
8

риодов Ni интервале времени 0 ...
ся на угол ϕi :
Ni
где ti − время измерения угла ϕi .
ti , в течение которого КЛ поворачивает-
= 21pt∫i n(t) × dt ,
0
Интегрирование выражения (1) на угле 2π определяет число периодов выходного сигнала КЛ на полном обороте:
T
N 2π = 21p0∫ n(t) × dt ,
где T – время полного оборота КЛ.
N2π принимается приближенно в качестве масштабного коэффициента.
Угол поворота в лазерной динамической гониометрии определяется выражением:
ϕi = 2π(Ni N2π ) . |
(2) |
Выражение (2) описывает фазовый метод в лазерной динамической гониометрии.
Обычно измерение продолжается в течение некоторого числа оборотов,
где также определяется Ni и N2π . Процедура (2) называется «непрерывной самокалибровкой». В этом случае результат практически не зависит от медленных изменений масштабного коэффициента.
Систематическая погрешность измерения угла при использовании калибровки КЛ на угле 2π обусловлена, прежде всего, периодическим изменением параметров КЛ под воздействием каких-либо факторов. Основными источниками систематической погрешности КЛ являются магнитное поле и нестабильность скорости вращения.
При внутриоборотной нестабильности скорости вращения определенные угловые интервалы КЛ проходит за меньшие интервалы времени, а другие – за большие. Поскольку КЛ является инерциальным датчиком, т. е. чувствительным к угловым перемещениям относительно инерциального пространства, то вращение Земли создает аддитивную добавку к частоте его выходного сигнала. Эта добавка, проинтегрированная за большие или меньшие временные интервалы, возникающие из-за нестабильности скорости вращения, создает систематические искажения угловой шкалы КЛ. Таким образом, основной вклад в систематическую погрешность измерений
9

вносит слагаемое, пропорциональное вертикальной составляющей скорости вращения Земли Ω E .
Систематическая погрешность измерений кольцевым лазером может быть уменьшена использованием фазовременного метода измерений. Он заключается в том, что наряду с измерением фазы выходного сигнала КЛ производится измерение интервалов времени, сформированных выходными сигналами отметчика угла, которым в случае высокоточного динамического гониометра является ОДУ, а в случае ЛДГ для калибровки многогранных призм – НИ. Измерение временных интервалов между импульсами отметчика угла позволяет компенсировать погрешность, связанную с аддитивной составляющей в частоте выходного сигнала и внутриоборотной нестабильностью скорости вращения. Появление дополнительного источника погрешности, связанного с дискретностью измерения интервалов времени, существенно не влияет на итоговую погрешность измерения, так как измерение времени возможно с высокой точностью.
Поскольку Ω E на широте места известна с высокой точностью, то си-
стематическая погрешность измерений уменьшается алгоритмически. Алгоритм измерения угла фазовременным методом с компенсацией вертикальной составляющей скорости вращения Земли имеет следующий вид:
ϕi |
= 2π |
Ni ± N2π (ΩEti |
2π) |
|
||
|
|
|
. |
(3) |
||
N2π (1 |
|
|
||||
|
|
± (ΩET 2π)) |
|
|||
Знак «плюс» или «минус» определяется направлением вращения КЛ: если КЛ вращается по часовой стрелке, берется знак «плюс», в противном слу-
чае – |
знак «минус». |
|
|
|
||
Обычно измерение продолжается в течение M оборотов КЛ. В этом слу- |
||||||
чае результатом измерения являются среднее значение |
|
|||||
|
|
|
1 |
M |
|
|
|
|
ϕi = |
∑ϕij , |
(4) |
||
|
M |
|||||
|
|
|
j |
|
||
где j – |
номер текущего оборота, и среднеквадратическое отклонение |
|
||||
|
|
|
|
|
|
|
|
|
N |
|
|
|
|
|
Si = ∑(ϕij − ϕi )2 /(M (M −1)) . |
(5) |
||||
|
|
j |
|
|
|
|
После устранения влияния нестабильности скорости вращения, основным фактором, обуславливающим систематическую погрешность измерения угла кольцевым лазером, является магнитное поле. КЛ имеет ось чувстви-
10