Материал: 3924
16
2. Что происходит в динамике при несоответствии выбранного передаточного числа редуктора оптимальному по быстродействию? Покажите на переходных характеристиках
Лабораторная работа № 5 Исследование силовых параметров манипуляционных механизмов на
основе метода кинетостатического анализа
Цель работы: получение навыков определения и расчета силовых параметров механизма и приведенных движущих усилий в приводах на основе кинетостатического анализа предложенных конструкции.
Общие положения
Определить инерционно-массовые показатели звеньев механизма. Результаты занести в таблицу 3.
Вычертить в масштабе кинематическую схему механизма в заданном положении и расчленить ее на структурные группы.
Вычертить отдельно каждую структурную группу и составить для нее уравнение равновесия, определить требуемые реакции отброшенных связей на основе аналитических и графоаналитических расчетов.
Для ведущего звена определить движущие усилие в приводе. Результаты определения реакций RN в сочленениях робота и дви-
жущих усилий занести в таблицу 3. Сделать выводы.
Указания к выполнению работы
Данная работа является логическим продолжением лабораторных работ №1 и №2 и полностью основывается на их результатах. Так для выполнения данной работы у студентов должны быть результаты лабораторной работы №2, а именно, значения ускорений звеньев и их центров масс, а также их направления.
При определении инерционно-массовых показателей считать, что центры масс звеньев расположены в их геометрических центрах, а центральные моменты инерции рассчитать по формуле
(22)
где mi - масса z-го звена; li - длина i -го звена; п - число подвижных звеньев конструкции робота. Угловую скорость ведущего звена считать постоянной (ω1= const).
17
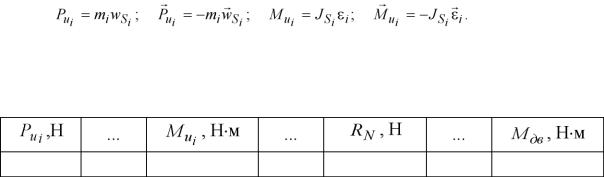
Силы и моменты инерции звеньев механизма робота определить по следующим выражениям:
Рассчитанные и определенные силовые параметры следует занести в таблицу 3.
Таблица 3
Контрольные вопросы
1.Изложить процедуру графоаналитического метода силового расчета механизма робота.
2.Изложить процедуру построения планов сил сложных кинематических механизмов.
18
Библиографический список
1.Анисимов А.В., Кондрашев В.Л., Лиходед К.А., Шошиашвили М.Э. Динамика гидросистем [Электронный ресурс]: учеб. пособие. Юж.-Рос. Гос. Техн. Ун-т (НПИ) - Новочеркасск: ЮРГТУ (НПИ), 2012. - 131 с.:
2.Затонский А. В. Информационные технологии: разработка информационных моделей и систем [Электронный ресурс]: доп. УМО вузов по университетскому политехническому образованию в качестве учебного пособия. / А.В.Затонский - М.: ИЦ РИОР: НИЦ ИНФРА-М, 2014
- 344 с.- ЭБС "Знаниум". - http://znanium.com/bookread2.php?book=400563
3.Иванов А. А. Основы робототехники [Электронный ресурс]: учеб. пособие / А.А. Иванов. - 2-е изд., испр. - М. : ИНФРА-М, 2018. - 223 с. - (Высшее
образование: |
Бакалавриат). - |
ЭБС |
"Знаниум". |
- |
www.dx.doi.org/10.12737/textbook_58e7460f93d2e6.7688379. |
|
|||
4.Лазарева, Т.Я. Основы теории автоматического управления [Текст]: пособие / Т.Я. Лазарева, Ю.Ф. Мартемьянов. – Тамбов : Изд-во Тамб. гос.
техн. ун-та, 2003. – 308 с.
5.Подураев Ю.В. Мехатроника: основы, методы, применение [Текст]: учеб. пособие для вузов Серия: Для вузов/ М.: Машиностроение, 2006. - 256 с.
6.Шошиашвили М.Э., Круглова Т.Н. Проектирование робототехнических и мехатронных систем. Ч.1. Проектирование роботов и робототехнических систем [Электронный ресурс]: учеб. пособие [для вузов] / Шошиашвили М. Э.; Круглова Т. Н.; ЮРГТУ(НПИ). Новочеркасск: Изд-во ЮРГТУ(НПИ),
2012. - 190 с.
7.Шошиашвили М.Э., Круглова Т.Н. Проектирование робототехнических и мехатронных систем. Ч.2. Проектирование мехатронных систем [Электронный ресурс]: учеб. пособие [для вузов] /Шошиашвили М. Э.; Круглова Т. Н.; ЮРГТУ(НПИ). - Новочеркасск: Изд-во ЮРГТУ(НПИ),
2012. - 214 с.
8.Шошиашвили М.Э., Шошиашвили И.С. Механика управляемых машин и мехатронных систем [Электронный ресурс]: учеб. пособие [для вузов]. 2-е
изд., доп. Юж.-Рос. гос. техн. ун-т (НПИ) - Новочеркасск: ЮРГТУ
(НПИ), 2012. - 188 с.
19
Мещерякова Анна Анатольевна
Материалы для мехатроники и робототехники
Методические указания к лабораторным работам по направлению подготовки 15.03.06 Мехатроника и робототехника
профиль - Управление в мехатронных и робототехнических системах и производств» для очной формы обучения
Редактор С.Ю. Крохотина
Подписано в печать |
Формат бумаги |
Заказ |
||
Объем |
п.л. |
Усл. п.л. |
Уч-изд. л. |
Тираж |
ФГБОУ ВО «Воронежский государственный лесотехнический университет имени Г.Ф. Морозова»