Материал: 3924
11
и редуктора.
Если же приведенный момент инерции нагрузки  соизмерим с моментом
соизмерим с моментом  , то приведенный момент Jn следует принять как
, то приведенный момент Jn следует принять как
. |
(5) |
Для приводов, имеющих в своем составе редуктор, приведенные моменты инерции зависят от передаточного отношения редуктора в квадрате. В этом случае такое передаточное число может являться определяющим при выборе двигателя. Для каждого двигателя можно рассчитать оптимальное передаточное отношение редуктора iPopt.
Рассмотрим несколько вариантов расчета оптимального значения ipopt, отвечающего ряду критериев. В основе расчета лежит дифференциальное уравнение движения
(6)
которое с учетом приведенных выше выражении можно представить в виде
(7)
где M - момент двигателя, Мн - момент на нагрузке, ηр - КПД редуктора, εн - ускорение вала нагрузки, ip - передаточное число редуктора.
Минимизация времени переходного процесса при заданных параметрах ЭД. Для уменьшения времени переходного процесса в приводах следящих систем, работающих, как правило, в режиме частых пусков и торможении, необходимо уменьшать приведенный динамический момент привода. В этом случае в качестве критерия оптимального передаточного числа iPopt принимают максимальную величину развиваемого приводом ускорения εн в динамических режимах работы, характеризуемых моментом инерции Jн и постоянным моментом Mн.
Решая уравнение (7) относительно εн, получим:
(8)
Приравняв к нулю производную  , найдем
, найдем
12
(9)
Подставляя найденное значение iPopt в выражение (8), получим выражения для нахождения максимального ускорения
(10)
Выражение (9) получено из условия реализации двигателем номинального момента M. Если же поставить условие нахождения оптимального передаточного числа редуктора, обеспечивающего максимальное ускорение, при реализации максимального пускового момента,
то с учетом выражения , где Mmax – максимальный или пусковой момент, Mдв – номинальный момент ЭД, получим
, где Mmax – максимальный или пусковой момент, Mдв – номинальный момент ЭД, получим
(11)
В том случае, если момент нагрузки Mн оказывается значительно меньше момента двигателя при пуске, можно принять
(12)
Контрольные вопросы
1.Как влияет момент нагрузки на оптимальное передаточное число редуктора?
2.Что происходит в динамике при несоответствии выбранного передаточного числа редуктора оптимальному по быстродействию? Покажите на переходных характеристиках.
13
Лабораторная работа № 4 Исследование влияния передаточного числа редуктора мехатронного
модуля на динамические свойства системы управления при обеспечении минимального момента при пуске и торможении
Цель работы: получение опыта выбора параметров механического редуктора при проектировании следящей системы управления.
Общие положения
Для заданных исходных параметров объекта управления выбрать электродвигатель и рассчитать передаточное число механического редуктора, обеспечивающего минимальный момент при пуске при заданном ускорении (движение по заданной тактограмме).
Провести исследования зависимости iopt = f (Мн) и iopt = f (εн) при значениях момента нагрузки и значениях ускорения на нагрузке
изначениях ускорения на нагрузке
Всреде моделирования MatLab Simulink составить модель системы управления, включающую задатчик скорости вращения объекта управления, П-регулятор, преобразователь (звено первого порядка), электродвигатель, редуктор, объект управления.
Провести исследование на модели влияния передаточного числа редуктора на динамические свойства системы при i = iopt; i = 0.75iopt; i = 1,25iopt, где iopt - передаточное число редуктора, обеспечивающее минимальное время переходного процесса.
Сделать выводы.
Указания к выполнению работы
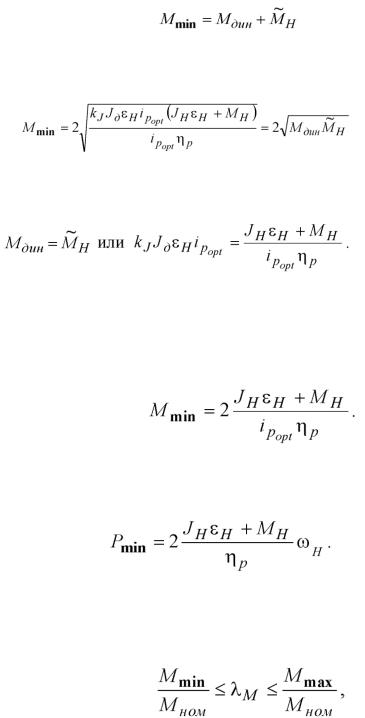
Схема объекта исследования приведена на рис. 3.1. Диаграмма движения объекта приведена на рис. 4.
Рисунок 4 – Диаграмма движения объекта

14
В большинстве случаев при проектировании как мехатронных, так и робототехнических систем, проектировщику привода задается или принимается им из каких-либо технологических соображений диаграмма движения механизма. Примерный вид такой диаграммы приведен на рис. 4. Такая диаграмма строится на основе принятой или рассчитанной по циклограмме работы всей системы и технологического оборудования номинальной скорости движения исполнительного механизма, требуемых времени разгона (пуска) tn и торможения tm исполнительного органа. При разработке такой диаграммы следует проверить, выполняется ли условие обеспечения заданного перемещения S за время движения tДВ (если такое условие поставлено). Для этого необходимо проинтегрировать диаграмму
движения  или найти площадь фигуры (трапеции), ограниченной линиями диаграммы движения и осью времени t (рис. 4).
или найти площадь фигуры (трапеции), ограниченной линиями диаграммы движения и осью времени t (рис. 4).
Для решения поставленной задачи нахождения оптимального передаточного числа, обеспечивающего минимум момента ЭД при заданном ускорении пуска εn ( ) или торможения εm (
) или торможения εm ( ), продифференцируем выражение (7) по ip и приравняем полученное выражение к нулю
), продифференцируем выражение (7) по ip и приравняем полученное выражение к нулю
(13)
Из последнего выражения определим оптимальное передаточное число редуктора
(14)
где εн - ускорение пуска или торможения нагрузки.
Значение минимального момента ЭД получим, подставив полученное значение iPopt в выражение (7):
(15)
В последнее выражение входит неизвестный момент инерции двигателя. Для решения данного уравнения учтем, что согласно (3.4) момент, развиваемый двигателем, уравновешивается суммой динамического мо-
15
мента ЭД  и составляющей приведенного динамического момента нагрузки
и составляющей приведенного динамического момента нагрузки т.е.
т.е.
. |
(16) |
Подставляя выражение (5) в виде
(17)
и приравняв (16) и (17), получим, что  откуда
откуда
(18)
Из полученного выражения следует, что расчетное ускорение можно получить, если нагрузкой уравновешивается половина момента двигателя, а другая половина идет на ускорение собственного ротора, т.е.
(19)
Минимальная мощность ЭД
(20)
После получения значения Mmin по выражению (15) или (19) следует выполнить проверку на условие
(21)
где Mном – номинальный момент ЭД.
Контрольные вопросы
1. Как влияет момент нагрузки и ускорение на нагрузке на оптимальное передаточное число редуктора?