Материал: 3924
6
(1)
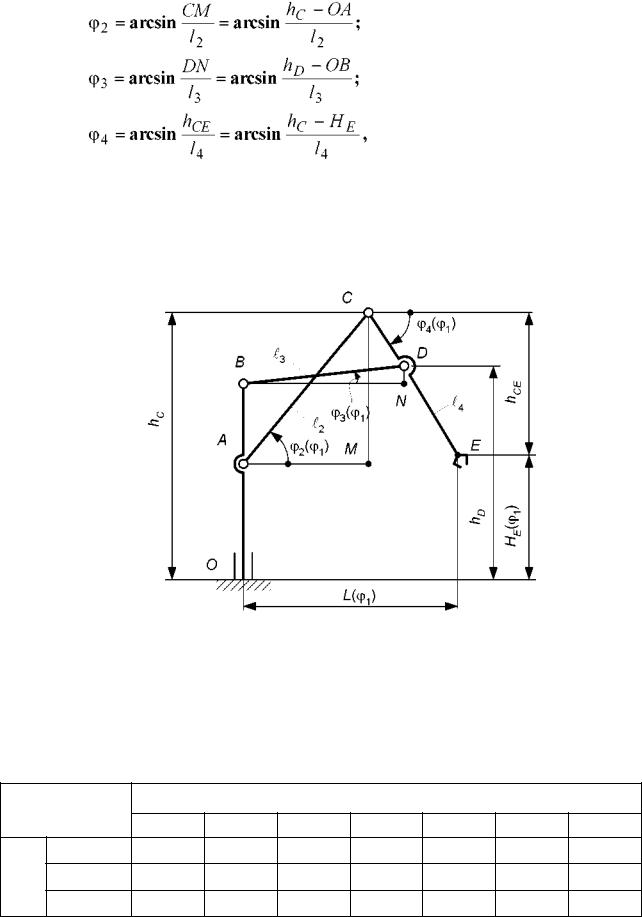
где l2, l3, l4, OA, OB - постоянные величины, а hC, hD, HE - измеряемые параметры. Значения постоянных величин заносим в таблицу 1, а переменных величин - в таблицу 2.
Рисунок 1 – Кинематическая схема механизма
|
|
|
|
Таблица 1 |
/2, мм |
/з, мм |
/4, мм |
OA, мм |
OB, мм |
|
|
|
|
|
|
|
|
|
|
Таблица 1.2
Измеря__ емые __
Обобщенная координата ф1, град
0 |
30 |
60 |
90 |
120 |
180 |
hC, мм
hD, мм
НЕ, мм

7
Расчет |
ные |
|
|
L, мм
φ2, град
φ3, град
φ4, град
Контрольные вопросы
1.Что называется механизмом? В чем его отличие от жесткой конструкции (фермы)?
2.С чем связано, что для ряда предложенных конструкций число степеней подвижности превышает число обобщенных координат? Какие дополнительные преимущества это дает механизму?
3.Какими реальными кинематическими парами представлены данные механизмы?
Лабораторная работа № 2 Исследовать кинематических характеристик мехатронных модулей
движения
Цель работы: исследование кинематических параметров мехатронных модулей движения, получение навыков оценки кинематической составляющей погрешности позиционирования.
Общие положения
Для предложенных кинематических структур выполнить описание прямой и обратной задач кинематики.
Подготовить программу на ЭВМ для реализации основных кинематических зависимостей (прямая и обратная задачи кинематики) указанных структур.
На основе решения прямой задачи кинематики для указанных структур получить и исследовать зависимость кинематических погрешностей δS/δφ (схемы А и С), δφ/δLц (схема В).
Сделать выводы.
Указания к выполнению работы
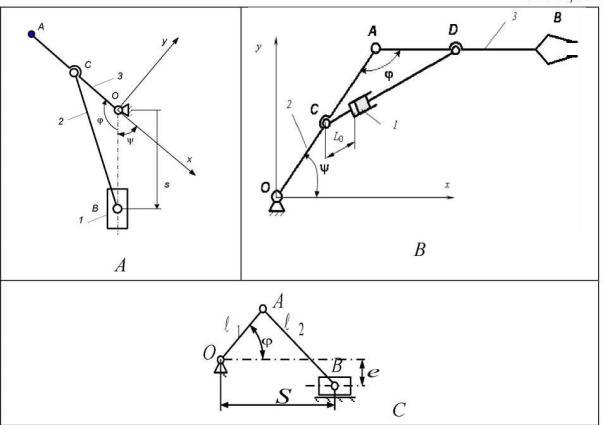
Кинематические схемы мехатронных модулей движения приведены на рис. 2.
8
Рисунок 2 – Кинематические схемы мехатронных модулей движения
Для структур А и С считать прямой зависимостью функцию S = f (φ), а для структуры В - функцию φ = f (Lц).
Для структур А и С исследование следует проводить для диапазона изменения угла φ от 0 до 180° с шагом 1°; для структуры В - для диапазона изменения длины штока цилиндра Lц от L0 = 0,1 м до Lц = 0,8 м с шагом
0,005 м.
Контрольные вопросы
1.Что называется механизмом? В чем его отличие от жесткой конструкции (фермы)?
2.С чем связано, что для ряда предложенных конструкций число степеней подвижности превышает число обобщенных координат?
3.Какие дополнительные преимущества это дает механизму?
4.Какими реальными кинематическими парами представлены данные механизмы?
9
Лабораторная работа № 3 Исследование влияния передаточного числа редуктора мехатронного
модуля на динамические свойства системы управления при обеспечении максимального быстродействия
Цель работы: получение опыта выбора параметров механического редуктора при проектировании следящей системы управления.
Общие положения
Для заданных исходных параметров объекта управления выбрать электродвигатель и рассчитать передаточное число механического редуктора, обеспечивающего минимальное время переходного процесса (максимальное быстродействие).
Провести исследования зависимости iopt = f (Mн) при значениях момента нагрузки Мн = {0,5Mнзад; 0,75Mнзад; Mнзад; 1,25Mнзад;
1,50,5Mнзад }.
В среде моделирования MatLab Simulink составить модель системы управления, включающую задатчик скорости вращения объекта управления, П-регулятор, преобразователь (звено первого порядка), электродвигатель, редуктор, объект управления.
Провести исследование на модели влияния передаточного числа редуктора на динамические свойства системы при i = iopt; i = 0,75iopt;
i = 1,25iopt, где iopt - передаточное число редуктора, обеспечивающее минимальное время переходного процесса.
Сделать выводы.
Указания к выполнению работы
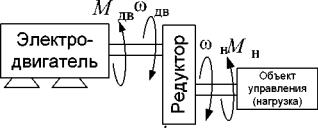
Схема объекта исследования приведена на рис. 3. Рассматриваемые здесь расчет и исследования производятся для мехатронных и автоматических систем, в которых должно обеспечиваться позиционирование исполнительного механизма или рабочего органа по положению.
Рассмотрим вначале особенности проектирования привода, у которого нагрузочный момент зависит от перемещения (угла поворота) исполнительного механизма.
Рисунок 3 – Схема объекта исследования

10
Исходной в этом случае является зависимость приведенного к валу ЭД момента сопротивления от угла поворота вала исполнительного механизма (нагрузки) Mc = f (φн), где φн - угол поворота вала исполнительного механизма.
При этом указанный приведенный момент для рычажных механизмов определяется одним из методов, изученных ранее, а в случае соединения вала нагрузки с валом ЭД через зубчатый редуктор с передаточным числом ip и имеющим общий КПД ηр, по формуле
(2)
где  – момент сопротивления на валу нагрузки,
– момент сопротивления на валу нагрузки,
 – соответственно передаточные отношения и КПД отдельных ступеней или передач редуктора.
– соответственно передаточные отношения и КПД отдельных ступеней или передач редуктора.
Как правило, для механизмов, у которых нагрузочный момент зависит от угла поворота вала нагрузки, момент инерции, приведенный к валу двигателя, также является величиной переменной. В этом случае также рассчитывается приведенный к валу ЭД момент инерции механизма
Jn = f (φн).
В случае соединения вала ЭД с валом исполнительного механизма только через вращающиеся вокруг неподвижной оси массы расчет приведенного момента инерции может быть выполнен по формуле
(3)
где  – моменты инерции ЭД, J1, J2,…, Jn – моменты инерции вращающихся масс (зубчатых колес) редуктора, Jн – момент инерции нагрузки.
– моменты инерции ЭД, J1, J2,…, Jn – моменты инерции вращающихся масс (зубчатых колес) редуктора, Jн – момент инерции нагрузки.
В следящих системах мощностью до сотен ватт и выше применяют двигатели постоянного тока независимого возбуждения с регулированием угловой скорости по принципу ЭМУ-Д, Г-Д и УВ-Д. Особенность таких систем состоит в том, что момент инерции нагрузки, приведенный к валу двигателя, как правило, в несколько раз меньше, чем момент инерции якоря двигателя, а приведенный момент инерции редуктора составляет лишь 5-25 % от момента инерции якоря, т. е. при переходных процессах динамический момент двигателя затрачивается в основном на преодоление инерции самого двигателя. В этом случае упрощенно (или на предварительном этапе расчета) можно принять, что
(4)
где  – 1,1 – 1,3 – коэффициент, учитывающий момент инерции нагрузки
– 1,1 – 1,3 – коэффициент, учитывающий момент инерции нагрузки