Материал: 3597
ПРАКТИЧЕСКАЯ РАБОТА №5
ОПРЕДЕЛЕНИЕ КИНЕМАТИЧЕСКИХ И ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ КАНАТНЫХ МЕХАНИЗМОВ
Цель работы: На основе кинематических и геометрических параметров определить рабочие характеристики лебедок.
В лесной промышленности широко применяются лебедки для привода канатных и канатно-блочных систем и механизмов. Лебедки бывают одноступенчатые и многоступенчатые, однобарабанные и многобарабанные, однонаправленные и реверсивные, прямонаправленные и разворотные.
Трелевочная лебедка состоит из двигателя, холостого трелевочного барабана, рабочего барабана, разворотного рабочего барабана, разворотного возвратного барабана, редуктора, коробки передач и электрогенератора.
Требуется: определить канатоемкость барабана; скорость движения каната; тяговое усилие барабана; производительность лебедки.
Количество витков каната, расположенных по длине барабана по горизонтали определяется:
iв = |
lб |
ϕ ,шт. |
(5.1) |
|
|||
|
dк |
|
|
где lб - длина барабана, м (принимается по |
согласованию с |
||
преподавателем); |
|
||
dк - диаметр каната, м, [1];
ϕ - коэффициент не плотности укладки витков на барабане, ϕ = 0, 7 −0,92 ; Количество рядов каната, расположенных по вертикали (с учетом запаса
2 dк между ребордой и верхним рядом навивки)
iр = |
(D1 |
−D2 )−4dк |
, шт. |
(5.2) |
|
2dк |
|||
|
|
|
|
|
где D1 - диаметр реборд барабана; мм. |
|
|
||
D2 - диаметр барабана, мм, D2 =300 −450 . |
|
|
||
Общее количество витков на барабане: |
|
|
||
i = iр iв , шт |
|
(5.3) |
||
Средняя длина одного витка каната, навиваемого на барабан:
21
lср = |
π(D1 +D2 |
−4dк ) |
|
|
|
|
, мм |
(5.4) |
|
2 |
|
|||
Общая канатоемкость барабана определяется:
L = i lср , мм (5.5)
Скорость движения каната и тяговое усилие необходимо определять для первого и последнего рядов витков. При многорядной навивке каната на барабан скорость его движения неодинакова на разных рядах витков.
Для первого ряда:
νmin = |
π (D2 +dк ) nб |
,м/с |
(5.6) |
||
|
60 1000 |
||||
|
|
|
|
|
|
Для последнего ряда: |
|
π (D1 −4dк ) nб |
|
|
|
νmax = |
|
,м/с |
(5.7) |
||
|
60 1000 |
|
|||
|
|
|
|
|
|
Вследствие того, что канат навивается на барабан лебедки в несколько рядов, скорость движения каната всё время изменяется, а, следовательно, изменяется и величина тягового усилия.
Ρmax = Ν η , Кн |
(5.8) |
νmin
где Ν - мощность, расходуемая барабаном, кВт берется [1]; η - КПД передаточного механизма лебедки, η = 0,92 .
Производительность лебедки в смену на трелевке определяется:
Πсм = |
(Τ−tпз ) |
ϕ1 ϕ2 Qn |
(5.9) |
||||||||
|
l |
ср |
+ |
|
l |
ср |
+t |
+t |
|
||
|
|
|
|
|
|||||||
|
|
|
|
|
2 |
|
|||||
|
|
|
|
|
|
|
|
||||
|
|
νx |
|
ν |
1 |
|
|
||||
|
|
|
гр |
|
|
|
|||||
где t1 -время прицепки (сбора) пачки, мин. определяется по формуле: |
|
||||||||||
|
|
|
|
t1 = а0 Qn , мин |
(5.10) |
||||||
t2 - время отцепки пачки |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t2 =b0 +c0 Qn ,,мин, |
(5.11) |
||||||
где а0 =3,5, b0 =2,9, c0 =0,24коэффициенты, зависящие от среднего объема хлыста.
Qn - средний объем трелюемой пачки, м3 принимаем из справочной литературы [1];
22
ϕ1 - коэффициент использования рабочего времени, ϕ1 = 0,81−0,85; ϕ2 - коэффициент использования тягового усилия лебедки, ϕ2 = 0, 75 −0,8 ; Τ - продолжительность рабочей смены, Τ = 400 −480мин;
tпз - время на подготовительно-заключительные работы, tпз = 40 −50мин; lср - среднее расстояние трелевки, принимается по согласованию с
преподавателем, м;
νx - средняя скорость подачи прицепного оборудования к месту чеперовки, м/мин;
νгр - средняя скорость рабочего каната с пачкой, м/мин.
Отчет по практической работе №5 должен содержать:
1.Исходные данные к работе, согласно индивидуальному заданию
2.Расчет основных формул согласно индивидуальному заданию и построение графика.
3.Вывод о проделанной работе.
ПРАКТИЧЕСКАЯ РАБОТА №6
РАСЧЕТ ОСНОВНЫХ ЭЛЕМЕНТОВ ТЕХНОЛОГИЧЕСКОГО ОБОРУДОВАНИЯ ЛЕСОПОГРУЗЧИКОВ
Цель работы: Определить основные параметры технологического оборудования лесопогрузчика.
Площадь зева захвата определяется по той же формуле, что и для грейферных захватов. Расстояние между рычагами захвата выбирают из условия устойчивого положения груза на рычагах с учетом различной длины лесоматериалов с тем, чтобы центр тяжести груза находился между рычагами. При погрузке деревьев и хлыстов расстояние рекомендуется принимать в пределах от 2,0 до 3,0 м, при погрузке бревен - 1,5-2,5 м.
Подъем груза челюстным захватом происходит в два приема: первый - груз сдвигается при горизонтальном движении захвата и под него подводится нижняя челюсть, второй - нижняя челюсть, вращаясь, поднимается и захватывает части груза.
Момент, развиваемый гидроцилиндрами относительно оси вращения
23
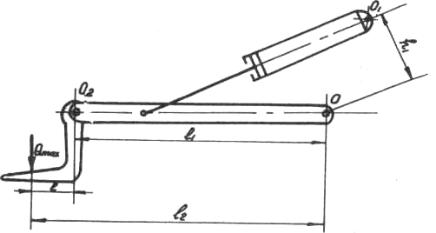
стрел ы (рис. 6. 1), определяется по формуле: |
|
М = n Pшт р η |
(6.1) |
где n - ч исло цили ндров, поднимающих стрелу; |
|
Pшт - усилие, развиваемое гидроцилиндром при |
работе штоковой |
полостью, Н;
h - плечо приложения силы гидроцилиндра, м;
η - коэф фициент полезного действия оси поворота, η = 0,99 .
Рисунок 6.1 Схема расчета гидроцилиндров подъема стрелы
челюстного погрузчика
Для определения силы тяж ести по днимаемого груза составляется сумма моментов относительно точки О и приравнивается к нулю:
∑Мо = М −qcl1 −Ql2 = 0 |
(6.2) |
||
Откуда |
|
|
|
Q = |
М −qcl1 |
(6.3) |
|
l2 |
|
||
где qc - сила тяжести стрелы с захватами и |
гидроц илиндрами поворота |
||
челюстей, Н. Данная ве личина оп ределяется по формуле представле нной ниже:
|
qc = Gц +Gк +Gв +Gзв +Gз +Gтр |
(6.4) |
|
где Gц - сила тяжести цепи, Gц =1300 −1400Н ; |
|
||
Gк - сила тяжести клыков захвата, Н; |
|
||
Gв |
- сила тяжести шлицевых валов, Gв =1400Н |
; |
|
Gзв |
- сила тяжести звездочки, Gзв |
=18 0 −200Н ; |
|
Gз |
- сила тяжести захвата, Gк +Gз |
=1 4800Н ; |
|
Gтр |
- сила тяжести труб стрелы, Gтр = 3000Н . |
|
|
l1 - длина стрелы, м;
l2 - длина стрелы плюс челюсть захвата, м
24
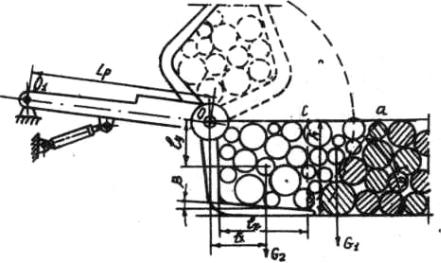
Общая си ла тяжести сдвигаемого груза, Н (рис. 6.2) складывается из силы тяжести части штабеля или призмы и си лы тяжести груза, находящегося над нижней челюстью, т.е.
|
|
|
G = G1 +G2 |
|
|
|
(6.5) |
||
где |
|
|
|
|
|
|
|
|
|
|
|
G1 = 0 ,5 ctgαo h2 lср |
kп |
γ |
|
(6.6) |
|||
|
|
|
|
|
|
|
g |
|
|
|
|
|
G2 |
= h lr lср |
kп |
γ |
|
|
(6.7) |
|
|
|
|
|
|
g |
|
|
|
где |
αo - |
угол естественного |
откоса |
для круглых лесоматериалов, для |
|||||
деревь ев |
и |
хлыстов |
αo = 50 ÷650 |
(0,87 ÷1,13 рад) , |
для |
бревен |
|||
αo = 35 ÷450 (0,6 ÷ 0,75рад) ; |
|
|
|
|
|
|
|
||
h - высота штабеля, призмы или слоя, м; |
|
|
|
|
|||||
lср |
- длина нижней челюсти, м; |
|
|
|
|
|
|||
Рисунок 6.2 Схема расчета челюстного захвата
lr - горизонтальн ая проекция нижней челюсти, м; |
|
kп - коэффициент полнодревесности штабеля, м; |
|
γ - плотность древесины, т/м3. |
|
Усилие на штоках гидро цилиндров поворота захвата можно |
найти, |
составив сумм у моментов относительно точки О2 и приравняв ее к нулю: |
|
∑Мо 2 =Qmax − Pшт Rзв ηзв |
(6.8) |
отсюда |
|
25