Материал: 2416
8.7. Векторные диаграммы синхронного генератора
Векторные диаграммы, соответствующие выражению (8.4), приведены на рис. 8.10. На рис. 8.10, а вектор тока по отношению к вектору напряжения повернут на угол φ в сторону отставания, что соответствует активно-индуктивному характеру сопротивления нагрузки
ZН (см. рис. 8.9, а).
|
|
|
UXL1 I |
I |
|
|
UХС |
|
|
UXL1 |
|
90° |
|
U |
|||
Е |
|
|
|
|||||
|
Е |
90° |
|
|
|
Е |
UXL1 |
|
|
|
|
|
|
||||
|
|
U=UR |
|
UR |
|
|||
|
U |
UХL |
|
|
|
|
||
|
90° I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
UR |
|
|
|
|
φ |
|
|
θ |
θ |
|
|
|
|
θ |
|
|
|
|
|
|
|
|||
φ |
φ=0 |
|
а |
б |
в |
|
Рис. 8.10. Векторные диаграммы фазы синхронного генератора для |
|
случаев активно-индуктивной (а), активной (б) и активно-ёмкостной (в) |
||
|
нагрузки: UR – активная составляющая напряжения нагрузки; |
|
|
UХL – индуктивная составляющая напряжения нагрузки; |
|
|
UXС – ёмкостная составляющая напряжения нагрузки |
|
На рис. 8.10, б вектор тока по направлению совпадает с вектором напряжения (φ=0), что соответствует активному характеру нагрузки.
На рис. 8.10, в вектор тока по отношению к вектору напряжения повернут на угол φ в сторону опережения, что соответствует активноёмкостному характеру нагрузки.
8.8. Внешние характеристики синхронного генератора
Зависимости напряжения U генератора от тока нагрузки I при неизменных токе возбуждения ротора Iр, частоте вращения ротора п2 и угле сдвига по фазе между током и напряжением φ называются внешними характеристиками генератора. Их можно построить с помощью векторных диаграмм (см. рис. 8.10). ЭДС Е является величиной постоянной при неизменном магнитном потоке и в соответствии с урав-
180
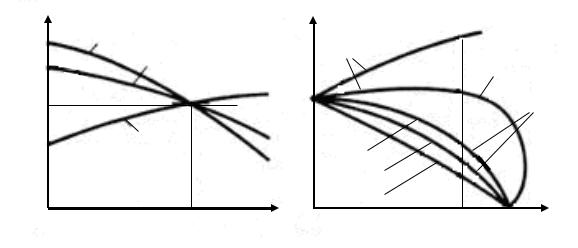
нением электрического состояния определяется суммой напряжения U и падения напряжения UXL1. Следовательно, как видно из векторных диаграмм, с увеличением тока нагрузки I при активной и актив- но-индуктивной нагрузках напряжение генератора уменьшается (см. рис. 8.10, а, б); при активно-ёмкостной нагрузке – увеличивается (см.
рис. 8.10, в).
U
Uном
0
|
|
|
|
|
|
|
|
|
|
U |
|
|
|
|
|
|
|
|
|
|
||||
φ>0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cosφ=0,6 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
φ=0 |
|
|
|
|
|
|
|
|
|
|
|
φ<0 |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cosφ=0,8 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U0 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
φ>0 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
φ<0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
φ=0 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cosφ=0,8 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cosφ=0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
а |
|
Iном |
|
I |
|
|
|
|
|
|
б |
Iном Iк |
I |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Рис. 8.11. Внешние характеристики синхронного генератора при различных видах нагрузки, полученные при одинаковом для всех характеристик номинальном напряжении Uном (а)
и одинаковом напряжении холостого хода U0=E0 (б)
На рис. 8.11, а изображены внешние характеристики генератора при различных видах нагрузки, полученные при одинаковом для всех характеристик Uном. Если устанавливать одинаковое напряжение при холостом ходе U0=E0 (рис. 8.11, б), то при номинальном токе напряжения Uном будут различными. При U=0 (короткое замыкание) все характеристики пересекаются в одной точке, соответствующей значению тока Iк.
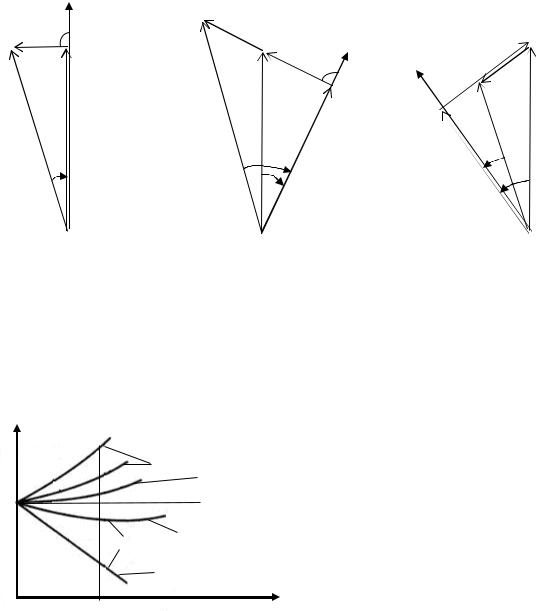
8.9. Регулировочные характеристики синхронного генератора
Зависимости тока возбуждения ротора Iр от тока нагрузки I при неизменных напряжении U, угле φ и частоте вращения ротора п2 называются регулировочными характеристиками. Они показывают, как надо изменять ток возбуждения генератора, чтобы поддерживать его напряжение неизменным при изменении тока нагрузки.
Величина ЭДС Е при постоянной частоте вращения ротора n2 пропорциональна току возбуждения ротора Iр. Поэтому, как видно из векторных диаграмм, представленных на рис. 8.12, с возрастанием тока нагрузки при ψ>0 ток возбуждения ротора необходимо увеличивать (см. рис. 8.12, а, б), а при ψ<0 – уменьшать (см. рис. 8.12, в).
181
90° |
I |
UXL1 |
|
|
|
UХС |
||
Е |
UХL 90° I |
|
||||||
Е UXL1 |
U=UR |
I |
|
U |
||||
U |
|
|||||||
|
|
|
|
|
UR |
90° |
UXL1 |
|
|
|
|
|
|
UR |
Е |
||
|
|
|
ψ |
|
|
ψ |
||
ψ |
φ=0 |
|
|
|
|
|||
|
|
|
|
|
φ |
|||
|
|
|
|
φ |
|
|||
|
|
|
|
|
|
|
||
а |
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
в |
|
|
|
|
|
|
|
|
|
|
|
Рис. 8.12. Векторные диаграммы синхронного генератора с неявно выраженными полюсами для активной (а), активно-индуктивной (б) и активно-емкостной (в) нагрузок: ψ – угол сдвига по фазе между ЭДС Е и током I
Регулировочные характеристики синхронного генератора приведены на рис. 8.13.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Чем больше угол ψ по аб- |
|
|
|
|
|
cosψ=0 |
|
|
|
|
|
|
|
|||||
|
Iр |
|
|
|
|
|
|
|
|
|
|
солютной величине, тем боль- |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
ψ>0 |
|
|
|
|
|
|
|
ше изменение напряжения при |
||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
cosψ=1 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
переходе от режима холостого |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
хода к режиму номинальной |
|
|
|
|
|
|
|
|
|
|
cosψ=0,8 |
|
|
|
нагрузки и тем в большей сте- |
|||
|
|
|
|
|
ψ<0 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
пени требуется изменять ток |
||
|
|
|
|
|
|
|
|
cosψ=0 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
возбуждения. Чтобы подклю- |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ченные к генератору потреби- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Iном |
|
|
|
|
|
|
|
I |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
тели работали при напряжении, |
||||||
|
Рис. 8.13. |
Регулировочные характери- |
|||||||||||||||
|
|
близком к номинальному, при- |
|||||||||||||||
|
|
стики синхронного генератора |
|
|
|
меняются специальные быст- |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
родействующие регуляторы тока возбуждения.
8.10. U-образные характеристики синхронного генератора
Ценной особенностью синхронного генератора, подключенного к электрической системе большой мощности, является возможность регулирования его реактивного тока посредством тока возбуждения, изменение которого приводит к изменению реактивной мощности: при большом токе ротора (перевозбуждении) генератор отдает в сеть
182
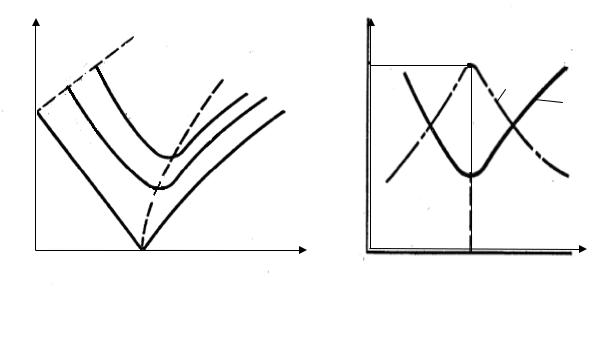
активную и индуктивную мощности, при недовозбуждении – активную и ёмкостную мощности.
Зависимость тока статора от тока возбуждения ротора синхронного генератора при постоянных значениях активной мощности на валу или (так как Р=Мвр·ωр, где Р – активная мощность на валу; Мвр – электромагнитный момент; ωр=const – угловая скорость вращения ротора) электромагнитного момента отражают U-образные (или V-образные) характеристики (рис. 8.11, а), показывающие возможность регулирования реактивной мощности. Минимумы кривых соответствуют чисто активным токам статора (cos φ=1). В любой точке U-образной кривой:
cos φ= |
Iа |
. |
(8.6) |
|
|||
|
I |
|
|
Зависимость тока ротора для одной из U-образных кривых при
Р=const≠0 показана на рис. 8.11, б.
I
0
|
Граница |
|
|
|
|
|
|
|
|
|
|
|
||||
|
I cos φ |
|
|
|
|
|
||||||||||
|
устойчивости |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P=const |
|
|
cos φ=1 Р2> Р1 |
|
|
|
|
1,0 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
cos φ |
||||||
|
|
Р1>0 |
|
|
|
|
|
|
|
|
|
I |
||||
|
|
Р=0 |
|
|
|
|
|
|
|
|
|
|
|
|||
QС |
|
|
|
|
|
|
|
|
|
cos φ (ёмк.) |
|
|
cos φ (инд.) |
|||
|
QL |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
а |
|
Iр |
|
|
|
|
|
|
|
|
|
|
Iр |
||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|||
|
|
|
|
|
|
|
|
|
|
|
||||||
Рис. 8.11. U-образные характеристики синхронного генератора (а) и зависимости тока статора I и cos φ от тока возбуждения ротора (б)
Левее кривой cos φ=1 (см. рис. 8.11, а) ток имеет ёмкостную реактивную составляющую (QC), правее – индуктивную (QL). В левой части графика U-образные кривые не доходят до оси ординат, кроме первой кривой при Р=0. Это означает, что при малом токе возбуждения IР мала амплитуда электромагнитного момента и при увеличении активной мощности (или момента турбины) может произойти выпадение генератора из синхронизма.
183
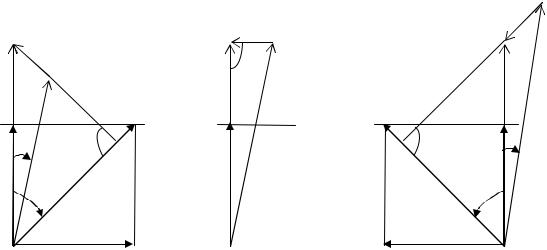
8.11.Коэффициент мощности, векторные диаграммы
иU-образные характеристики синхронного двигателя
Важным свойством синхронной машины, работающей в трехфазной электрической системе большой мощности (U=const), является возможность регулирования ее коэффициента мощности. В синхронном двигателе это осуществляется регулированием тока возбуждения. Анализ зависимости коэффициента мощности синхронного двигателя от тока возбуждения может быть проведен на основании его уравнения электрического состояния (8.5), из которого следует:
|
|
|
|
|
|
|
(8.7) |
E |
=U |
−U XL1 . |
|||||
Векторные диаграммы, соответствующие выражению (8.7), приведены на рис. 8.12 для разных режимов работы при разной величине тока возбуждения.
|
|
|
|
|
|
UXL1 |
|
|
UXL1 |
|
UXL1 |
|
E |
U |
|
|
U 90° |
E |
|
|
|
|
|
U |
|||
|
|
|
|
|
|
|
|
|
E |
|
|
|
|
I |
θ |
90° |
I |
I=Ia |
I 90° |
Ia θ |
a |
|
|
||||
|
|
φ<0 |
|
φ=0 |
|
φ>0 |
|
|
|
|
|
|
|
|
|
|
IL |
|
IC |
|
|
|
а |
|
б |
в |
|
|
|
Рис. 8.12. Векторные диаграммы фазы синхронного двигателя, |
||||
|
|
являющегося: а - активно-индуктивной нагрузкой; |
|
|||
|
|
б - активной нагрузкой; в – активно-емкостной нагрузкой |
||||
Во всех случаях вектор напряжения источника, к которому подключен синхронный двигатель, изображен направленным вверх. Величина этого напряжения во всех режимах одна и та же и равна напряжению источника. Величина ЭДС E в разных режимах разная и определяется величиной магнитного потока, т.е. током возбуждения ротора Iр. Падение напряжения на индуктивном сопротивлении обмотки статора UXL1 определяется, исходя из выражения (8.5), как векторная разность между напряжением источника U и ЭДС E:
|
|
|
|
|
|
|
(8.8) |
U |
XL1 =U − Е . |
||||||
184 |
|
|
|
|
|||