Материал: 2385
циклов N, которые соответствуют прохождению радиосигналов расстояния от спутника до приемника и представляют собой неизвестные величины, регистрируются их приращения, обусловленные изменениями расстояний до спутников за упомянутое время Δt. Такие приращения N могут быть определены по показаниям фазоизмерительного устройства при условии непрерывного отслеживания принимаемых от спутника радиосигналов, в результате чего они становятся известными величинами.
На основе вышеизложенного может быть сделан вывод о том, что третьи разности открывают перспективу разрешения неоднозначностей, свойственных фазовым измерениям, за счет нахождения полных значений N по их приращениям N. Однако количественный анализ получаемых с помощью третьих разностей результатов свидетельствует о том, что такая процедура, предусматривающая нахождение полных значений искомых величин по их разностям, неизбежно связана с существенным понижением точности. Это утверждение является следствием того, что при образовании разности в результате сохраняются те же достоверные разряды единиц, что и в сравниваемых величинах, но обратный переход от разностных значений к исходным величинам связан с умножением разности на соответствующий множитель, в результате чего умножается и свойственная разностному значению погрешность. Поэтому описанный выше подход оказывается, во многих случаях, недостаточно эффективным и используется, как правило, только в качестве вспомогательного метода, а для отработки болёе надежных подходов к разрешению неоднозначностей приходится изыскивать другие методы. Более подробно этот круг затронутых вопросов рассмотренвследующемподразделе.
9. Принципыразрешениянеоднозначностей при фазовых измерениях
Как уже отмечалось ранее, при определении расстояний до спутников фазовыми методами возникает достаточно сложная проблема разрешения неоднозначности, т. е. нахождения целого числа длин волн N, укладывающихся в измеряемой длине линии от спутника до приемника. Эта сложность обусловлена, прежде всего, тем, что определяемые дальности оцениваются величинами около 20 000 км, в то время как длина волны несущих колебаний в системе GPS составляет всего 0,2 м. При таких исходных предпосылках параметр N характеризуется числами, равными около 106. Следовательно, для того, чтобы не вносить грубых ошибок в результаты измерений, т. е. уверенно определять величину N с точностью до одной целой единицы, необходимо обеспечить надежное нахождение этой величины с относительной погрешностью менее, чем 1 10-8. При этом приходится учитывать и такие факторы, как непрерывное изменение величины N из-за орбитального движения спутника, а также необходимость нахождения серии таких величин для нескольких одновременно наблюдаемых спутников, поскольку для каждого конкретного спутника величина N имеет свое индивидуальное значение.
На основе вышеизложенного при отработке подходов к выбору эффективных методов разрешения неоднозначности наблюдается стремление выполнить следующие основные предпосылки:
1)перед процедурой, связанной с определением параметра N целесообразно исключить все основные источники систематических ошибок, которые обуславливают смещение результатов измерений и искажают истинное значение N, не позволяя рассматривать его как целочисленную величину;
2)для исключения необходимости многократного определения величины N для каждого спутника по мере его орбитального движения целесообразно ограничиться нахождением этой величины только в начальной точке наблюдения конкретного спутника, а затем отслеживать ее изменения по показаниям фазоизмерительного устройства;
3)выбираемые методы должны обеспечивать точность предварительных определений значений измеряемых расстояний, связанных с процедурой разрешения неоднозначности, не
172
хуже половинного значения длины волны несущих колебаний, т. е. применительно к GPS на уровнеоколо 10 см;
4) желательно, чтобы предлагаемые методы были достаточно универсальными с тем, чтобы можно было их использовать при работе как с двухчастотными, так и с одночастотными приемниками, в которых исключается возможность использования двух несущихчастот с целью разрешения неоднозначности.
При выполнении перечисленных выше предпосылок открывается возможность ограничиться нахождением величины N только в начальной точке отслеживаемой траектории наблюдаемого спутника, т. е. осуществить разрешение так называемой начальной неоднозначности. Применительно к такой постановке задачи есть несколько наиболее распространенных методов разрешения неоднозначностей, характерных для спутниковых GPS измерений. К ним относятся:
1)геометрический метод;
2)метод, базирующийся на комбинации кодовыхи фазовыхизмерений;
3)методпоисканаиболеевероятныхзначенийвеличиныN;
4)нетривиальные методы разрешения неоднозначности.
Глава 11. МЕТОД АЭРОГЕОДЕЗИЧЕСКИХ РАБОТ НА ОСНОВЕ ЛАЗЕРНОЙ ЛОКАЦИИ И ЦИФРОВОЙ АЭРОФОТОСЪЁМКИ
Одним из современных методов сбора и обработки данных о местоположении объектов и рельефе местности, а также их качественных и количественных характеристиках, является метод на основе лазерной локации и цифровой аэрофотосъёмки.
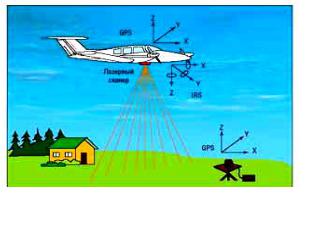
В основе технологии лежит выполнение синхронного маршрутного лазернолокационного сканирования местности и цифровой аэрофотосъемки в составе, например, следующего комплекта оборудования:
Лазерного сканера ALTM-1210 с разверткой лазерного луча в одной плоскости и частой выполнения измерений 5 Кгц. Угол сканирования может быть задан в диапазоне 20 , а частота сканирования может меняться от 0 до 28 Гц. На основании данных этой подсистемы можно вычислить расстояние между излучателем и объектом отражения, а также угол в плоскости сканирования, куда был направлен луч в момент излучения.
Инерциальная система, датчики которой установлены в одном блоке с лазерным сканером. На основании данных этой подсистемы можно вычислить параметры ориентации летательного аппарата (датчиков инерциальной системы, лазерного сканера и фотоаппарата) относительно определенной системы координат
GPS-приемник. На основе данных которого, осуществляется синхронизация времени работы всех подсистем, а также вводится единая система координат и рассчитывается
траектория полета летательного аппарата. Для выполнения съемки создаются базовые GPS-станции, данные которых используются для вычисления дифференциальных поправок при определении траектории летательного аппарата. Для определения траектории летательного аппарата и уточнения угловых данных инерциальной системы,
173
Принципиальная схема лазерной локации местности 11.1
применяется метод совместной обработки GPS-данных и данных инерциальной системы. Применение такого метода расчета повышает как точность определения угловых параметров, так и местоположения.
Кроме прибора, выполняющего лазерно-локационное сканирование местности, на борту летательного аппарата устанавливается цифровая фотокамера. Поскольку в составе прибора, выполняющего лазерно-локационную съемку (ALTM-1210), входит инерциальная подсистема, то геодезическая привязка фотографий осуществляется программным способом автоматически, учитывая траекторию полёта и угловую ориентацию фотоаппарата и летательного аппарата в момент экспозиции снимка. То есть вычисляются линейные - X, Y, Z и угловые - , , элементы внешнего ориентирования снимка.
Технические характеристики лазерного сканера ALTM-1210:
Рабочая высота полета носителя |
250 - 1000 м |
|
Точность по дальности |
|
15 см |
Разрешение по дальности |
3 см |
|
Угол сканирования |
от 0 до ±20° |
|
Полоса захвата |
от 0 до 0.68 долей высоты |
|
Угловая точность |
|
0.05° |
Частота сканирования |
от 0 до 24 Гц |
|
Рабочая длина волны |
1047 нм |
|
Частота генерации лазерных импульсов |
10 |
Кгц |
Расходимость луча |
0.25 мрад, полный угол |
|
Длительность импульса |
|
16 нс |
Длительность фронта импульса |
|
3 нс |
Средняя энергия в импульсе |
80 |
мк Дж |
Класс лазера по безопасности |
IV |
|
Напряжение питания |
28 |
В |
Номинальный потребляемый ток |
15 |
А |
1. Технология выполнения лазерно-локационных аэросъемочных работ
включает несколько этапов:
Планирование и подготовка аэросъемочных работ. На данном этапе осуществляется:
Получение картографического материала и утверждение границ объекта
съемки
Выбор параметров съемки, исходя из продукта необходимого Заказчику и условий съемки
Подготовка материалов для навигации и настройка навигационной системы
Камеральная рекогносцировка и выбор геодезических пунктов для
определения
местоположения базовых станций.
Составление проекта съемки
Работы по геодезическому обеспечению аэросъемочных работ.
Полевое обследование пунктов ГГС, мест установки базовых станций и мест расположения контрольных точек.
Создание рабочего проекта привязки базовых станций.
Закрепление мест установки базовых станций и контрольных точек.
Спутниковые наблюдения в сети (в соответствии с рабочим проектом) и на контрольных точках.
174
Обработка наблюдений. Вычисление координат базовых станций и контрольных точек.
3.Установка и калибровка оборудования на летательном аппарате (ЛА)
Установка оборудования на борт ЛА
Измерение параметров установки аппаратуры
Спутниковые наблюдения для проведения калибровки оборудования
Проведение калибровочного полета
Обработка результатов калибровочного полета и проверка точности данных
4.Выполнение лазерно-локационной съемки
Расстановка и включение базовых станций, обеспечивающий дифференциальный режим обработки GPS-данных
Выполнение съемочного задания, согласно выбранным режимам съемки и графику работ
Архивация отснятого материала
5.Контроль полноты и качества отснятого материала
Контроль качества GPS-измерений
Контроль наличия пропусков в данных
Контроль качества полученных данных
Вычисление расхождений координат точек, полученных по результатам лазерного сканирования, и контрольных точек.
Составление, если это необходимо, задания на пересъемку
6.Обеспечение правил проведения аэросъемочных работ и решение режимных вопросов.
Следующими технологическими этапами являются первичная обработка материалов съемки и тематическая обработка. Результатом первичной обработки является массив точек, каждая из которых является результатом отражения лазерного луча от поверхности рельефа или иного объекта, в который попал лазерный луч. Каждая такая точка характеризуется тремя координатами в какойлибо геодезической или локальной системах координат.
Конечным продуктом после тематической обработки являются:
Цифровая модель рельефа (ЦМР) и цифровая модель растительности в виде массивов классифицированных точек принадлежащих рельефу и не принадлежащих рельефу соответственно.
Тематические слои по «Техническому заданию» заказчика (гидросеть, ЛЭП, строения, дороги и т.д.)
Векторизованные слои (гидросеть, ЛЭП, строения, дороги и т.д.)
Ортофотоплан
Лазерно-локационные и аэрофотосъемочные работы, выполняемые
входе полевого обследования
1.1Установка и наладка оборудования на борту летательного аппарата.
Перед проведением полевых работ выполняется монтаж аэросъёмочного оборудования на борту самолёта или вертолёта, пример последнего приводится ниже на базе разработок ЗАО «ОПТЭН Лимитед».
В составе комплекта аэросъёмочного оборудования используются:
-собственно лазерный сканер ALTM-1210;
-бортовой навигационно-геодезический спутниковый приёмник производства компании Ashtech модели Z-12 (двухчастотный, 12-канальный);
-видеокамера производства компании Watek;
175
-видеомонитор пилота;
-видеозаписывающее устройство производства компании Sony;
-бортовой компьютер производства компании Panasonic;
-цифровой фотоаппарат производства компании KODAK модели DCS 760;
-навигационный компьютер с установленным программным обеспечением
Ozi Explorer;
-устройства сопряжения с бортовыми системами вертолёта.
Методика установки оборудования на вертолет МИ-8, получивший самое широкое распространение в Российской гражданской авиации, хорошо отработана в ЗАО «ОПТЭН Лимитед» по проведению комплексного лазерного обследования. Сканирующая головка совместно с боксом цифрового фотоаппарата устанавливается над плановым люком тросовой подвески вертолета Ми-8. При этом применяется специальная алюминиевая рама, разработанная совместно организациями АО «Взлет» и ЗАО «ОПТЭН Лимитед».
Внутренняя установка сканирующей головки и бокса цифрового фотоаппарата имеет ряд неоспоримых преимуществ перед внешней подвеской. К ним следует отнести,
во-первых, лучшую влаго- и пылезащищенность оптических прецизионных модулей. При внутренней установке во время взлета и посадки отверстие люка закрывается заслонкой, что препятствует попаданию на оптику пыли, поднимаемой с ВПП потоком воздуха, идущим от главного ротора вертолета.
Во-вторых, внутренняя установка обеспечивает гораздо более плотную фиксацию сканирующей головки относительно корпуса вертолета, а значит, и относительно фазового центра антенны GPS, которая также закреплена на корпусе. Следует принять во внимание, что местоположение точек отражения лазерного импульса рассчитывается исходя из того предположения, что центр инерциальной системы координат (находящейся внутри сканирующей головки) неподвижен относительно фазового центра антенны GPS. Поэтому, в конечном счете, внутренняя установка позволяет обеспечить большую точность измерения, чем внешняя.
Блок управления ALTM устанавливается на платформу, разработанную совместно ЗАО «ОПТЭН Лимитед» и AO «Взлет», раму в районе 4-го и 5-го шпангоутов вертолета. Питание бортовой аппаратуры осуществлялось от одной точки вертолетной системы питания через специальное распределительное устройство, спроектированное в АО «Взлет». Исходя из требований безопасности, в конструкции этого распределительного устройства предусмотрена возможность отключения пилотом питания бортового комплекса посредством переключения всего одного тумблера. Плавкие предохранители распределительного устройства рассчитаны на пропускание тока не более 25 А.
Приемник GPS, бортовой компьютер и компьютер управления режимами сканирования HUSKY штатно закрепляются на верхней плоскости блока управления
ALTM.
Согласно конструкторской документации, разработанной в АО «Взлет», специальная антенна GPS, предназначенная для авиационного базирования, устанавливается в верхней части корпуса хвоста вертолета Ми-8 вместо первого строевого огня. Такая установка позволяет, при одновременном выполнении требований безопасности, обеспечить минимально возможное маскирование спутников GPS корпусом вертолета.
Непосредственно на приборную панель перед левым пилотом устанавливается видеомонитор. Обычно монитор отображает видеоинформацию, приходящую от камеры, установленной в одном блоке со сканирующей головкой, и позволяет пилоту контролировать область сканирования, однако в данном случае на монитор пилота
176