Материал: 2385
Фp(t) = fp(t) + fpδtp , |
(10.6) |
где fр - частота возбуждаемых в приемнике несущих колебаний, отнесенная к |
|
моментувыполнения измерений; |
|
δtp - уход показаний часов приемника.
Подлежащий определению полный фазовый сдвиг между отмеченными выше
колебаниями описывается при этом соотношением: |
|
Ф = Фs(t) -Фp(t) = - fsτ + fsδts- fpδtp+ (ts– tp)t. |
(10.7) |
Поскольку при фазовых измерениях |
удается измерить фазовый |
сдвиг тольков пределах одного периода, тоимеем: |
|
Ф = N – Ф, |
(10.8) |
где N - целое число фазовыхциклов, укладывающихся в измеряемом расстоянии;
Ф- измеряемое в приемнике значение разности фаз.
Всоответствии с проведенными исследованиями уклонение несущих частот fs и f p от номинального значения на небольших временных интервалах (с учётом проводимых корректировок)оценивается дробными долями герца. Исходя из этого, можно принять:
fs f p f . В результате представляется возможным пренебречь последним членом в
формуле |
|
(3) изаписатьеев следующем виде: |
|
Ф = fτ + N + f(δtp- δts). |
(10.9) |
Величина τ представляет собой время запаздывания принимаемого сигнала, а потому во многих случаях, условно считают это время отрицательной величиной. Если ввести значение скорости света в вакууме с и соответствующую поправку за влияние атмосферы δtatm, тоформула(10.5)можетбытьпредставленакак:
Ф = - fsρ/с + N + f(δtp- δts). |
(10.10) |
Откуда: ρ = λ(N- Ф) + с(δtp- δts)+с δtatm. |
(10.11) |
где λ = с/f -длинаволны несущихколебаний. |
|
Знак перед членом Ф зависит от режима |
фазометра и может принимать как |
положительные, так и отрицательные значения.
Из анализа формулы (10.11) следует, что для определения точного значения интересующей нас величины ρ на сантиметровом (или даже на миллиметровом) уровне точности необходимо с высокой точностью опредёлять все входящие в данную формулу поправки. Кроме того, необходимо располагать надежными методами нахождения неизвестной величины N, которая соответствует целому числу длин волн несущих колебаний, укладывающихся в измеряемом расстоянии между спутником и приемником.
|
|
|
Т а б л и ц а 10.1 |
№ |
Источник погрешностей |
Величина погрешности |
|
|
|||
|
|
При отсутствии |
При наличии |
|
|
режима |
режима |
|
|
умышленного |
умышленного |
|
|
загрубления (SА) |
загрубления (SА) |
1 |
Неточность знания |
5 м |
10-40 м |
|
эфемерид спутника |
||
2 |
Погрешность из-за |
|
|
|
неточного знания |
1 м |
10-50 м |
|
показаний часов спутника |
||
3Погрешность из-за влияния ионосферы:
для одночастотных |
|
|
приемников |
2-100м |
2-100 м |
для двухчастотных |
|
|
приемников |
Менее 1м |
Менее 1 м |
167
4 |
Погрешность из-за влияния |
Единицы |
Единицы |
|
тропосферы |
метров |
метров |
||
|
||||
|
|
|
|
Из приведенных в табл. 10.1 данных следует, что точность определения поправки δts на основе использования содержащёйся в навигационном сообщении информации оценивается на уровне 1м дажеприотсутствии режима умышленного загрубленияSА.
Поправка δts, вычисляемая в результате совместного решения системы уравнений откорректированных значений псевдодальностей для определения координат точки стояния характеризуется еще более низкой точностью (на уровне около ста наносекунд или в расстоянии - порядка несколькихдесятков метров).
Что касается метеопоправки δtatm, то даже при использовании двухчастотных приемников погрешность за счёт неё в линейной мере соответствует нескольким единицам метров (см.
табл.10.2).
Исходя из наличия таких значительных по величине погрешностей, не представляется возможным на основе уравнений (10.11) разработать эффективные методы нахождения величин N, а следовательно, и искомого расстояния на основе фазовых методов, так как для надежного разрешёния неоднозначности интересующее нас расстояние должно быть определено с погрешностью не хуже 0,5λ, что для основной несущей частоты L1 составляет величинуоколо 10см.
С учетом вышеизложенного были предприняты попытки изыскания способов многократного повышения точности определения перечисленных выше поправок, в результате которых наиболее эффективными оказались дифференциальные методы, базирующиеся на определении разности снимаемыхотсчётов, а не ихабсолютныхзначений.
Первыеразности
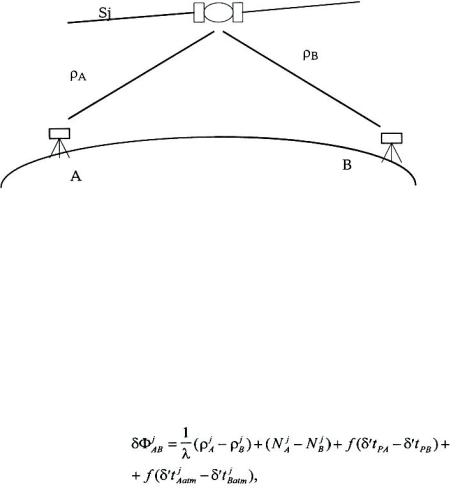
Рассмотрим, вначале, метод одновременных наблюдений одного спутника GPS с использованием двух GPS приемников, установленных на разнесенных пунктах наблюдения Аи В (рис. 10.5).
Такой вид наблюдений получил название метода образования разности фазовых измерений между станциями, которыйотносится
к так называемым первым разностям. Основная характерная особенность данного метода состоит в том, что обработка результатов измерений производится на основе использования фазовых сдвигов, получаемых одновременно на двух разнесенных станциях. Интересующая
нас разность фаз описывается при этом соотношением: δФjАВ = ФjВ - ФjА, (10.12)
где индекс j относится к спутнику Sj, а индексы А и В - к двум пунктам наблюдения А
и В.
Используя уравнения (10.10)- (10.12), будем иметь:
(10.13)
168
где ρjА и ρjВ - геометрические расстояния между спутником и приемниками, установленными соответственно точках Аи В;
NjA и NjB - целые числа фазовых циклов, укладывающиеся в измеряемых расстояниях от спутника Sj до точек Аи В;
f и λ - частота и длина волны несущих колебаний, используемыхпри фазовыхизмерениях; δ1tPA, δ1tPВ – отклонения показаний часов приемников, установленных в точках А и В, относительно времени системы;
δ1tjAatm,,δ1tjВatm-атмосферныевременныезадержкиприпрохождении радиосигналов от спутника соответственно до приемников, установленныхв точках Аи В.
Анализ соотношения свидетельствует о том, что при образовании первой разности удается целиком исключить погрешность, связанную с уходом показаний часов на спутнике. Вместе с тем существённо ослабляется влияние атмосферы, так как в данном случае возникает необходимость учета не абсолютных значений задержек радиосигналов в атмосфере, а ихразностей.
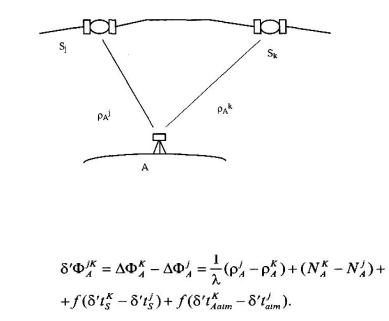
Наряду с перечисленными положительными качествами следует отметить также и негативные стороны такого метода. В частности, возникает необходимость применения не менее двух приемников, что не только повышает стоимость используемого потребителем оборудования, но и осложняет, во многих случаях, процедуру проводимых наблюдений. Следует заметить, что этот недостаток свойственен всем дифференциальным методам спутниковых измерений. Применительно к рассматриваемому методу остаются также неучтенными поправки, связанные с неточностью взаимных показаний часов двух приемников, которые по своим точностным показателям существенно уступают часам, установленным на спутнике (в GPS приемниках в подавляющем большинстве случаев вместо высокостабильных атомных опорных генераторов используются более дешевые, но менее стабильные кварцевые генераторы). Для преодоления последнего недостатка проанализируем другой принцип организации первой разности, который получил название разности фазовых измерений между спутниками (рис. 10.6). При реализации данного принципа с помощью приемника, установленного в точке А, одновременно наблюдается не менее двухспутников Sj и
Sk .
Рис. 10.6 К принципу дифференциальных фазовых измерений на основе образования первых разностей между спутниками
Характерная особенность этого метода заключается в образовании разности результатов фазовых измерений при одновременных наблюдениях одним приемником двух спутников. При этом образующаяся разность фаз может быть описана соотношением:
(10.14)
Используемые в данной
169
формуле величины имеют тот же физический смысл, что и в формуле (10.13), с тем отличием, что вместо расстояний от одного спутника до двух приемников использованы расстояния от двух спутников до одного приемника.
Отличительная особенность этого метода состоит в том, что удается нацело исключить поправки, обусловленные неточностью показаний часов приёмника, но не исключёнными при этомоказываютсяпогрешности показаний часов на спутнике.
На основе совместного рассмотрения этих двух разновидностей первых разностей был предложен вариант дифференциальных измерений, получивший название метода вторых разностей.
Вторые разности
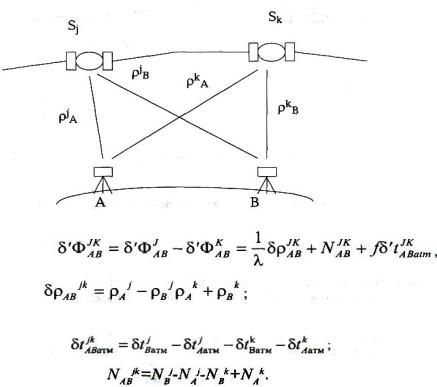
Этот метод нашел наиболее широкое практическое распространение при выполнении высокоточных геодезических измерений. Сущность данного метода состоит в том, что измерения производятся не менее, чем двумя приемниками, с помощью которых наблюдаются не менеедвухспутников (рис. 10.7).
Получаемые при этом результаты измерений образуются на основе использования так называемых вторых разностей, описываемыхсоотношение:
Рис.10.7 Кпринципу дифференциальныхфазовых измеренийнаосновеобразования вторыхразностей
(10.15)
где
(10.16)
Анализ формулы (10.15) свидетельствует о том, что при образовании вторых разностей из результатов измерений исключаются нестабильности хода часов как на спутниках так и в приемниках. При этом дополнительно ослабляется влияние атмосферы. Однако нерешенной остается проблема раскрытия неоднозначностей измеряемых расстояний, т. е. нахождение количества целых циклов N. Вместе с тем при определении разности координат между пунктами, на которых установлены одновременно работающие приемники, приходится учитывать неточность знания текущих координат спутников, что является следствием соотношения, которое связывает между собой измеряемые расстояния и искомые координаты интересующих нас точек. Возможность устранения с помощью вторых разностей основного недостатка одностороннего принципа дальномерных измерений, заключающегося в необходимости учета несинхронности работы опорных генераторов на передающем и приемном концах измеряемой линии линии, обусловила тот факт, что данный метод стал основным вариантом дифференциальных измерений при высокоточных спутниковых GPS определениях.
170
Дальнейший поиск путей разрешения свойственных фазовым измерениям неоднозначности привел к целесообразности использования не только вторых, но и третьих разностей.
Третьиразности
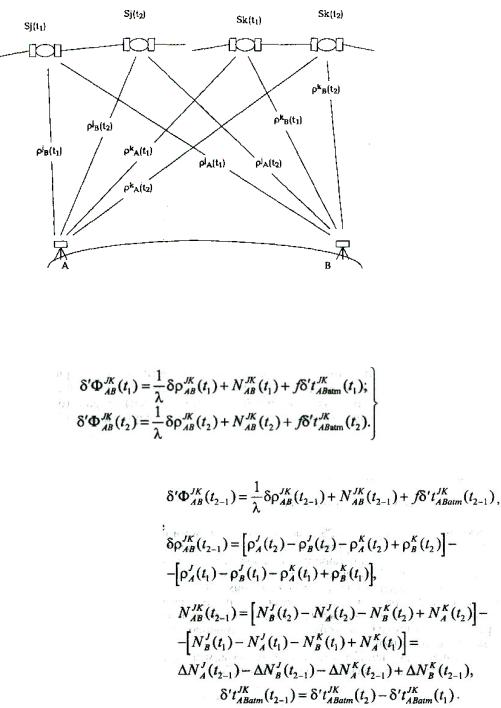
При выполнении спутниковых GPS измерений под третьими разностями принято понимать формируемые разности вторых разностей, относящихся к одним и тем же сочетаниям участвующих в измерениях приёмников и наблюдаемых спутников, но к различным эпохам, т.е. момента измерений, при движении спутников
по своиморбитам.
Для иллюстрации на рис. 10.18 приведена схема, поясняющая последовательное расположение спутников и участвующих в наблюдениях приемников, которые позволяют получить необходимую информацию для реализации метода третьих разностей.
|
В соответствии с формулой |
|
(10.15) характерные для моментов |
Рис. 10.8 К принципу дифференциальных фазовых измерений |
времени t1 и t2 вторые разности |
на основе образования третьих разностей |
описываются соотношениями: |
(10.17)
Третьи разности представляют собой разность этих соотношений:
(10.18)
где
Приведенная формула (10.18) свидетельствует о том, что при образовании третьих разностей фиксируется не абсолютные значения расстояний от приемников до
спутников, а их приращения припоследнихпо своейорбите завремяΔt = t2-t1. При этом вместо полныхзначений фазовых
171