Материал: 2385
кость которой совпадает с главной фокальной плоскостью объектива.
Конус АФА (2) крепится к нижней части корпуса и содержит оптическую систему, в которую входит объектив,
светофильтры, компенсатор сдвига изображения и др.
Кассета (3) служит для размещения фотопленки и приведения ее светочувствительного слоя при экспонировании в соприкосновение с плоскостью прикладной рамки. В промежутке между экспозициями фотопленка перематывается с подающей катушки на принимающую. Перематываемый участок пленки соответствует формату кадра с учетом промежутка между кадрами. Выравнивание пленки в плоскость выполняется механическим прижимом к плоскому стеклу или путем откачивания воздуха из промежутка между пленкой и прикладной рамкой.
Командный прибор (4) предназначен для дистанционного управления всеми механизмами аэрофотоаппарата - измерения времени между экспозициями и их продолжительности, подачи команд на срабатывание затвора АФА, перемотки фотопленки, отсос воздуха между фотопленкой и прикладной рамкой и т. п. В современных аэрофотоаппаратах командный прибор управляет двумя – тремя съемочными камерами.
Аэрофотоустановка (5) служит |
для крепления аэрофотоаппарата на борту |
|||||
|
|
|
носителя, |
ориентирования |
его |
в |
|
S |
|
пространстве и предохранения от толчков и |
|||
|
|
|||||
f |
|
|
вибрации. |
|
|
|
|
|
В |
плоскости прикладной |
рамки |
||
|
y |
|
||||
|
|
размещены четыре механические коор- |
||||
|
|
|
||||
|
o |
|
динатные метки (рис. 1.2), изображающиеся |
|||
|
|
|||||
o |
x |
на каждом снимке. Прямые, соединяющие |
||||
|
|
|
противоположные метки, должны быть вза- |
|||
Рис. 1.2. Прикладная |
Рис. 1.3. Первая |
имно перпендикулярны, а точка их пересе- |
||||
рамка аэрокамеры |
оптическая метка |
чения o – совпадать с главной точкой |
||||
|
|
|
снимка o. |
|
|
|
Современные АФА имеют в плоскости прикладной рамки 4–8 оптических координатных меток, размещенных по углам кадра, или равномерно распределенную по полю сетку крестов с шагом 1–2 см. Причем оптические координатные метки имеют специальные признаки (рис. 1.3), что допускает автоматическое определение их номеров и распознавание точки, к которой отнесены координаты.
Параметры аэрофотоаппарата (фокусное расстояние f и координаты главной точки o, расстояния между механическими метками, координаты оптических меток или крестов) определяют по результатам ее калибровки при строго определенном положении, одновременно с величинами остаточной дисторсии. Координаты точки o пересечения линий, соединяющих противоположные координатные метки прикладной рамки (рис. 1.2), определяют исходя из условия симметричности фотограмметрической дисторсии.
Современные аэрофотоаппараты (АФА) имеют формат кадра 18 18 или 23 23, или 30 30 см. АФА оснащены специальными устройствами, обеспечивающими: автоматическое вычисление интервалов между экспозициями (для аэрофотосъемки с заданным перекрытием), впечатывание в кадр сенситометрического клина и навигационных данных; автоматическое регулирование экспозиции, измерение контрастности изображения и компенсацию его сдвига; смену светофильтров; индикацию снимаемого ландшафта на мониторе и т. п.
|
|
|
Таблица 1.1 |
||||
Тип АФА |
Фокусное расстояние, |
Разрешающая |
Остаточная дисторсия, |
|
|
||
мм |
способность линий/мм |
мкм |
|
|
|
||
|
|
|
|
||||
АФА ТЭС-10М (РФ) |
100 |
33 |
10 |
|
|
|
|
АФА ТЭ-50 (РФ) |
500 |
35 |
10 |
|
|
|
|
ТК-350 (РФ) |
350 |
35–80 |
20 |
|
|
|
|
АТ-204 (РБ) |
150, 300 |
50–100 |
3 |
12 |
|||
RC Wild/Leica |
153 |
120 |
2 |
||||
|
|
|
|||||
RC Wild/Leica |
305 |
107 |
2 |
|
|
|
|
Основные технические характеристики некоторых современных АФА приведены в |
||||||||||
табл. 1.1. |
|
|
|
|
|
|
|
|
|
|
В конце XX в. начали появляться цифровые съемочные системы, основанные на |
||||||||||
использовании приборов с постоянной зарядовой связью в виде матриц, помещаемых в |
||||||||||
плоскости прикладной рамки, или линеек. Способы получения цифровых изображений, их |
||||||||||
основные характеристики и особенности фотограмметрической |
обработки рассмотрены в |
|||||||||
главе 6. |
|
|
|
|
|
|
|
|
|
|
3. Фотографический объектив и его характеристики |
|
|
||||||||
Фотографический снимок (аэроснимок, аэронегатив), в соответствии с законами гео- |
||||||||||
метрии, представляет собой перспективное изображение, |
построенное в центральной |
|||||||||
проекции, в которой все лучи света, отраженные от объекта съемки, проходят через одну |
||||||||||
точку, называемую центром проекции. |
|
|
|
|
|
|
||||
В действительности фотографическое изображение строится при |
помощи объек- |
|||||||||
тива, представляющего собой сложную оптическую систему, состоящую из комбинации |
||||||||||
собирательных и рассеивающих линз и предназначенную для получения действительного |
||||||||||
обратного изображения фотографируемого |
|
H1 |
H2 |
|
P |
|||||
объекта. Все линзы объектива ограничены |
|
|
||||||||
A |
|
|
|
|
||||||
шаровыми |
поверхностями |
различных |
|
S2 |
|
F2 |
|
|||
радиусов |
и |
точно |
центрированы |
|
|
|
|
|||
относительно прямой, проходящей через |
F1 |
S1 |
|
|
a |
|||||
центры кривизны всех линз. Эта прямая |
|
f |
|
f |
|
|||||
называется |
главной оптической осью, а |
|
|
|
|
P |
||||
|
H1 |
H2 |
|
|||||||
совпадающий с ней луч – главным |
|
|
||||||||
Рис. 1.4. Построение изображения |
||||||||||
оптическим лучом. |
|
|
с помощью оптической системы |
|||||||
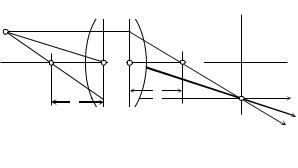
На рис. 1.4 представлена идеальная |
|
|
|
|
|
|
||||
оптическая система, состоящая из двух |
|
|
|
|
|
|
||||
сферических поверхностей. |
|
|
|
|
|
|
|
|
||
На главной оптической оси расположены передняя (S1) |
|
|
|
|
||||||
и задняя (S2) узловые точки, отнесенные к пространству предметов и пространству |
||||||||||
изображения соответственно. Передняя узловая точка называется центром |
фотографирова- |
|||||||||
ния, а задняя – центром проектирования. Луч, попадающий в переднюю узловую точку S1, |
||||||||||
при выходе из задней узловой точки S2 сохраняет первоначальное направление. |
|
|||||||||
Плоскости H1 и H2, |
проходящие через узловые точки перпендикулярно к главной |
|||||||||
оптической оси, называются главными плоскостями объектива, в которых и происхо- |
||||||||||
дит преломление лучей. |
|
|
|
|
|
|
|
|
||
Луч, параллельный главной оптической оси, после преломления пересекает ее в |
||||||||||
точке, называемой главным фокусом. Таких точек две: |
передний фокус F1 в пространстве |
|||||||||
предмета и задний фокус F2 |
в пространстве изображения. |
|
|
|
|
|||||
Плоскость, в которой получается резкое изображение фотографируемого объекта, |
||||||||||
называется фокальной плоскостью. В зависимости от расстояния между объективом и |
||||||||||
фотографируемым объектом положение фокальной плоскости изменяется, и при дос- |
||||||||||
таточном удалении объекта она проходит через главный фокус. |
Плоскости, |
проходящие |
||||||||
через главные фокусы F1 и F2 |
перпендикулярно к главной оптической оси, называются |
|||||||||
главными фокальными плоскостями. Расстояние между узловыми точками объек- |
||||||||||
тивов и точками фокуса одинаково. Оно называется фокусным расстоянием объ- |
||||||||||
ектива и обозначается символом f. |
|
|
|
|
|
|
||||
Луч, проходящий через передний |
фокус, |
после |
преломления |
становится |
||||||
параллельным главной оптической оси. |
|
|
|
|
|
|
||||
13
Удаления точек A и a от передней и задней узловых точек связаны с фокусным |
||||||
расстоянием известной формулой оптического сопряжения |
|
|
|
|||
|
1 |
1 1 , |
|
|
(1.1) |
|
|
f |
D |
d |
|
|
|
где f |
– фокусное расстояние |
объектива; D, |
d – расстояния |
вдоль главного |
||
оптического луча от передней и задней узловых точек до точки |
|
S |
||||
объекта A и точки изображения a соответственно. |
|
|
||||
|
|
f |
||||
В фотограмметрических построениях узловые точки |
|
|||||
|
|
|||||
объектива S1 |
и S2 (рис. 1.4) объединяют в одну, рассматриваемую |
a |
b |
|||
как центр фотографирования и одновременно как проектирования. |
|
|
||||
В связи с этим обе части каждого проектирующего луча будут |
|
H |
||||
представлятьоднупрямую линию. |
|
|
|
|
|
|
При аэрофотосъемке можно полагать, что объект |
|
|
||||
находится в бесконечности, и величиной 1/D в формуле (1.1) |
A |
B |
||||
можно пренебречь. В этом случае d |
= f, т. е. изображение |
|||||
объекта (местности) строится в главной фокальной плоскости. |
Рис. 1.5. Масштаб |
|||||
В этой плоскости и помещают светочувствительный материал |
аэрофотоснимка |
|||||
(фотопленку), на которой получается резкое изображение фото- |
|
|
||||
графируемой местности. Это позволяет применять для определения масштаба горизон- |
||||||
тального аэроснимка простую зависимость, вытекающую из подобия треугольников |
||||||
Sab и SAB (рис. 1.5): |
|
|
|
|
|
|
1 |
|
ab |
|
l |
|
f |
. |
(1.2) |
|
AB |
L |
|
|||||
m |
|
|
H |
|
||||
Здесь AB и ab – расстояния между точками на местности и их изображениями на снимке; f – фокусное расстояние объектива съемочной камеры; H – высота фотографирования.
Реальный фотографический объектив |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
характеризуются фокусным расстоянием, полем и |
|
|
|
|
|
|
|
|
|
|
|
P |
|||
углом зрения и изображения, относительным от- |
|
|
|
|
|
|
|
|
|
|
|
|
|||
верстием (диафрагмой), светосилой, глубиной |
S |
|
|
|
|
|
|
|
|
|
|||||
резкости, |
разрешающей |
способностью |
и |
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||||
искажениями, называемыми аберрациями. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
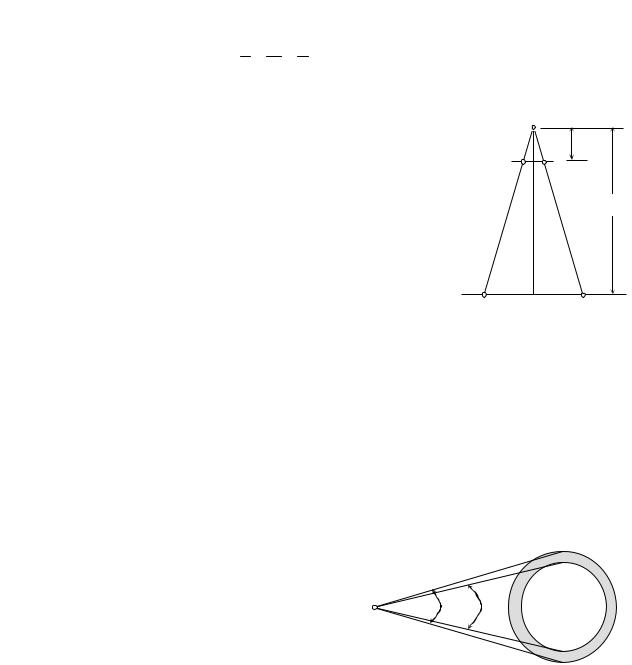
Если на экран P (рис. 1.6), установленный |
|
|
|
|
|
|
|
|
|
|
|
|
|||
в фокальной плоскости, |
спроектировать через |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||||
объектив удаленный ландшафт, то в центральной
Рис. 1.6. Угол и поле зрения и изображения
части экрана получится четкое, равномерно освещенное изображение, которое по мере удаления от центральной части к краям становится
все более размытым, а его освещенность уменьшается до нуля.
Полем зрения объектива называется часть изображения, в пределах которой наблюдается хотя бы минимальная освещенность. Угол 2 между лучами к диаметрально противоположным точкам поля зрения называется углом зрения.
Полем изображения называется часть поля зрения, в пределах которого изображение получается одинаково ярким и достаточно резким. Вписанный в это поле квадрат называется форматом кадра. Угол 2 между лучами к диаметрально противоположным точкам поля изображения называется углом изображения.
Практически все поле изображения не используется, поскольку его освещенность E связана с освещенностью в центре поля зрения E0 и углом , составленным направлением луча с главной оптической осью, следующей зависимостью
14
E E0 cos4 . |
|
|
|
|
Например, при угле зрения 1200 освещенность на краю изображения падает в 16 раз, |
||||
поэтому уменьшение потерь света в оптических системах является одной из основных |
||||
задач при их создании. |
|
|
|
|
Относительное отверстие объектива характеризует количество проходящего |
||||
через него света и, следовательно, его способность создавать изображение с определенной |
||||
степенью яркости. Величина относительного отверстия 1/n связана с диаметром действую- |
||||
щего отверстия d и фокусным расстоянием объективаf зависимостью |
|
|
||
1/n = d/f или n = f/d . |
|
|
|
(1.3) |
Величина действующего отверстия регулируется с помощью диафрагмы. Поскольку |
||||
количество пропускаемого диафрагмой света пропорционально квадрату относительного |
||||
отверстия, то величину 1/n2 называют светосилой объектива. |
|
|
||
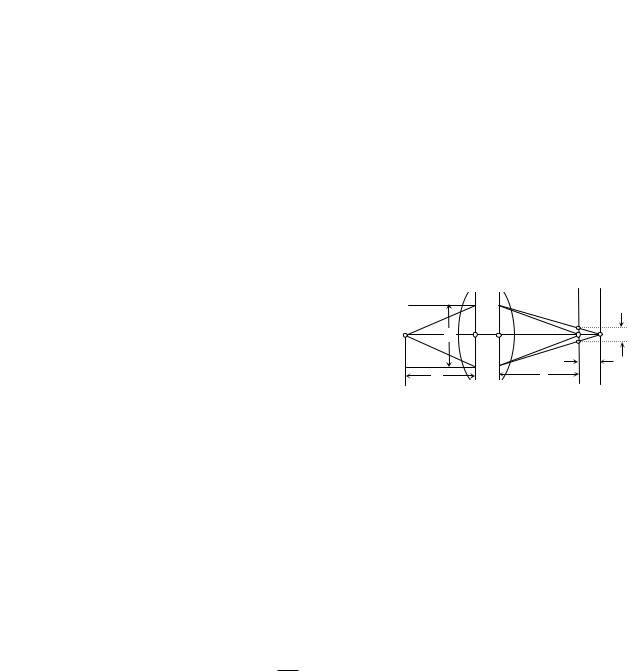
Глубина резкости объектива характеризует его |
способность |
строить резкие |
||
изображения объектов, расположенных от него на раз- |
|
|
|
|
личных расстояниях. |
|
H1 |
H2 |
P |
На рис. 1.7 изображены проекции двух точек |
|
|
|
|
пространства, одна из которых расположена в беско- |
A |
|
|
F a |
нечности, а вторая – на конечном расстоянии от |
|
d |
S2 |
a |
объектива. Изображение первой получено в точке фо- |
|
S1 |
a |
|
|
D |
|
x |
|
куса F, а второй – в виде точки a, расположенной на |
|
|
f |
|
расстоянии x от нее. Изображение точки пространства |
|
H1 |
H2 |
P |
|
|
|||
|
Рис. 1.7. К определению глубины |
|||
A в главной фокальной плоскости будет представлено |
|
|||
|
резкости изображения |
|||
кружком нерезкости диаметром a a = . Из подобных |
|
|
|
|
треугольников (рис. 1.7) следует, что |
|
|
|
|
|
δ |
|
d |
, или |
δ |
dx |
. |
|
(1.4) |
|
|
|
f x |
|
|||||||
|
x |
|
|
f x |
|
|||||
Заменив в основной формуле оптики (1.1) величину d на f+x, получим |
||||||||||
(f+x)f+Df=D(f+x) |
или |
x=f2/(D–f). После постановки |
этого выражения в (1.4) |
|||||||
получим |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
δ |
f 2 |
|
||
|
|
|
|
|
|
|
. |
(1.5) |
||
|
|
|
|
|
|
|
||||
nD
Отсюда минимальное удаление объекта, начиная с которого и до бесконечности величина кружка нерезкости не превысит :
f 2 |
(1.6) |
D . |
nδ
Найденная по формуле величина D называется гиперфокальным расстоянием.
При n = 4,5, = 0,1 мм и f = 200 мм D = 88,8 м.
Разрешающая способность объектива, выражаемая числом раздельно различаемых линий (штрихов) на 1 мм, характеризует его возможность воспроизводить раздельно мелкие детали изображения. Теоретически возможная разрешающая способность объектива Rоб вычисляется по следующей формуле, полученной на основе дифракционной теории света:
Rоб = 1480d/f=1480/n, |
(1.7) |
где d – диаметр действующего отверстия объектива.
Коэффициент 1480 применяется, когда раздельно воспринимаемые элементы изображения различаются по яркости на 25 %; при использовании для обработки изображений оптических приспособлений этот коэффициент может достигать 1800.
15

Найденная по формуле (1.7) теоретическая разрешающая способность объектива при d = 4 4,5 мм может колебаться в пределах 300 – 400 линий на 1 мм.
Фактическая разрешающая способность, определяемая путем фотографирования специального теста (миры) на оптической скамье, существенно ниже теоретической разрешающей способности из-за влияния различного рода искажений и доходит до 40–60 линий на 1 мм. Лучшие современные аэрофотосъемочные камеры имеют разрешение 100–150 линий на 1 мм.
Качественные показатели получаемого с помощью объектива изображения зависят от качества составляющих его линз и их конструктивного сочетания. Последним, как известно, присущи оптические недостатки, называемые аберрациями.
Хроматическая аберрация вызывается неодинаковым преломлением лучей с различной длиной волны. Наиболее преломляемыми лучами являются синие (их фокус ближе), а наименее – красные. Хроматическая аберрация устраняется подбором линз с различными коэффициентами преломления.
Сферическая аберрация вызывается несовпадением коэффициентов преломления линзы в точках, различно удаленных от главной оптической оси. Устраняется комбинацией выпуклых и вогнутых линз и отсечением крайних лучей с помощью диафрагмы.
Астигматизм возникает из-за несоответствия точек фокуса для горизонтальных и вертикальных лучей и устраняется подбором линз по кривизне, толщине и коэффициенту преломления.
Кривизна поля изображения проявляется в том, что фокальная поверхность линзы представляет собой не плоскость, а искривленную поверхность сложной формы. Степень кривизны этой поверхности определяется конструктивными особенностями объектива.
Дисторсия является следствием нарушения подобия (ортоскопии) построенного объективом изображения объекта, расположенного в плоскости, перпендикулярной к главной оптической оси. Эти нарушения приводят к смещению точек изображения как в радиальном направлении (радиальная дисторсия), так и перпендикулярно к ней (тангенциальная дисторсия). Лучшие современные объективы имеют дисторсию, не превышающую 2 мкм.
Все виды аберраций, кроме дисторсии, ухудшают разрешающую способность объектива, и их стремятся уменьшить или свести к минимуму путем подбора линз. Такие объективы, к которым относятся и аэрофотосъемочные, называют анастигматами.
К объективам предъявляется ряд требований специального характера. К ним относится высокая разрешающая способность, достаточные углы зрения и изображения, высокая точность в части подобия изображений объектам местности (ортоскопия), минимальная дисторсия и все виды аберраций, достаточная светосила и постоянство показателей при колебании температуры окружающей среды от –500 до + 600.
Четкой классификации объективов, основанной на каком-либо признаке, не существует. Однако известны характерные группы объективов, различающиеся некоторыми пара-
метрами и имеющие определенную область применений (табл. 1.2). Сверхширокоугольные объективы удобны для обзорных съемок и пригодны для вы-
сокоточного изображения рельефа местности, широкоугольные и нормальноугольные объективы – при контурных съемках, а узкоугольные – при съемках с больших высот.
16