Материал: 2308
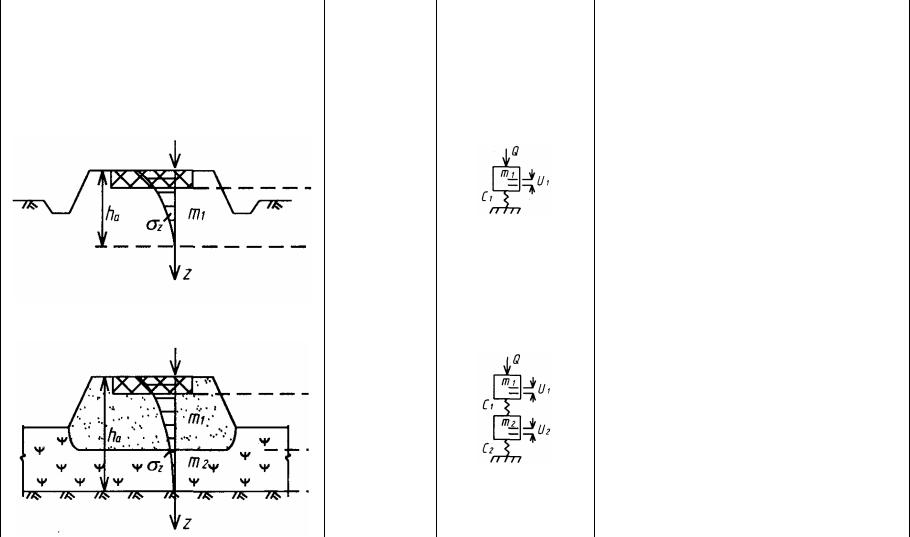
Тогда дифференциальное уравнение колебаний такой системы будет составлено из проекций всех вертикальных сил, действующих в конструкции на ось z (см. табл. 5.1, конструкция 1).
Аналогично поступают и с более сложными конструкциями, предварительно разделив их на слои. В качестве примера покажем решение системы дифференциальных уравнений для конструкции 2 (см. табл. 5.1). В общем виде прогиб поверхности конструкции U U1 U2 . Подставим в
|
|
|
t |
|
|
|
|
|
|
t |
|
|
|
систему уравнений значения U1 A1 sin |
|
|
|
|
U |
2 A2 sin |
|
|
|
|
|||
T |
и |
T |
и ре- |
||||||||||
|
|
|
|
||||||||||
|
|
0 |
|
|
|
|
|
0 |
|
|
|||
шим ее, последовательно исключая неизвестные. В результате получим
A1
и
A2
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
C |
|
M |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
Q C |
|
|
|
T |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
2 |
|
1 |
|
2 |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
(5.3) |
||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
M |
|
|
|
|
|
|
|
|
C |
|
C M |
|
|
|
|
|
C |
|
|||||
|
|
|
|
|
|
|
|
|
||||||||||||||||
C |
|
T |
|
|
|
|
|
|
2 T |
|
|
|
|
|||||||||||
1 |
|
1 |
|
|
|
|
2 |
1 |
|
|
|
1 |
|
|||||||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
Q C1 |
|
|
|
|
|
|
|
. (5.4) |
|
|
|
|
|
|
|
|
2 |
|
|
|
4 |
|
M1 |
|
2 M |
|
|
|
||||||||
|
|
|
M |
|
|
|
C2 M1M |
|
|
|
|||
|
|
|
|||||||||||
C1 C2 C1 T |
|
1 T |
|
2 T |
|
||||||||
|
0 |
|
|
|
|
|
0 |
|
|
|
0 |
|
|
Теперь эти максимальные амплитуды колебаний центров масс, в сумме дающие полный прогиб поверхности покрытия, можно сопоставлять с допустимым прогибом и делать выводы о пригодности конструкции на восприятие нагрузки Q. Возможно и решение уравнений относительно
d2U1 |
и |
d2U2 |
, если критерием устойчивости конструкций является уско- |
|
dt2 |
dt2 |
|||
|
|
рение вертикальных колебаний. Этот метод расчета динамических перемещений и ускорений отличается от методов механики сплошной среды простотой, за что придется поплатиться точностью расчетов.
78
|
|
|
Таблица 5.1 |
|
|
Конструкции дорог и колебательные системы |
|||
|
|
|
|
|
Конструкции земляного полотна |
Слои |
Модель колебатель- |
Дифференциальные уравнения колебаний |
|
конструкции |
ной системы |
конструкций |
||
|
||||
1 |
2 |
3 |
4 |
|
1. Насыпи на однородных грунтах |
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Q sin |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
d U1 |
|
|
|
t |
|
||||||||
|
|
|
|
|
|
|
|
m1 |
C1U1 |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
dt2 |
|
Qsin T |
|
|
|||||||||||
|
|
|
|
железобетон |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
супесь, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
суглинок |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
___________ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
супесь, суг- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
линок, глина |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2. Насыпи на слабых грунтах |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Q sin |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
0 |
|
|
|
d |
2U |
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|||
|
|
|
|
железобетон |
|
|
1 |
|
C1 U1 |
U2 Qsin |
|
|||||||||||||
|
|
|
|
m1 |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
|||||||||
|
|
|
|
|
|
dt |
2 |
|
|
|
||||||||||||||
|
|
|
|
песок |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T0 |
|||||
|
|
|
|
|
|
|
|
d2U2 |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
____________ |
|
m |
|
|
C U |
|
C U U |
|
0 |
|
|||||||||||
|
|
|
|
торф |
|
|
2 dt2 |
|
2 |
2 |
|
1 1 |
2 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
суглинок |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
79 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Окончание табл. 5.1
|
1 |
|
|
|
2 |
|
3 |
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
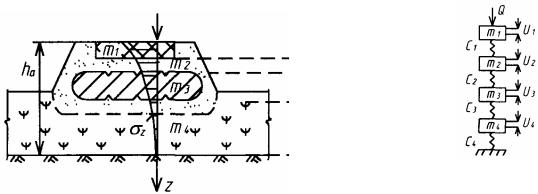
3. Насыпи на промороженных |
|
|
|
|
|
|
m d2U1 |
C (U |
U |
|
|
|
|||||||||||||
|
основаниях болот |
|
|
|
|
|
1 |
dt2 |
|
|
|
1 |
1 |
|
|
2 |
|
|
|
|||||||
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
||||
|
Q sin |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
U3 U |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
4) Qsin |
|
; |
|||||||||||||||||
|
|
T0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T0 |
|||||
|
|
|
|
|
железобетон |
|
m2 |
|
d 2U |
2 |
C2 (U2 |
U3 |
U4 ) |
|||||||||||||
|
|
|
|
|
песок |
. |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
dt |
2 |
|
||||||||||||||||
|
|
|
|
|
мерзл. песок |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
C1 (U1 |
U2 U3 |
U4 ) 0; |
||||||||||||||||||
|
|
|
|
|
торф |
|
|
|
|
|
m3 |
d2U3 |
|
C3(U3 U4) |
||||||||||||
|
|
|
|
___________ |
|
|
|
|
|
dt2 |
|
|||||||||||||||
|
|
|
|
|
суглинок |
|
|
|
|
|
C2(U2 U3 U4) 0; |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
m |
d2U4 |
C U |
C |
(U |
|
U |
) 0 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
4 |
|
dt2 |
|
|
|
|
4 4 |
|
3 |
|
3 |
|
4 |
|
|||
80
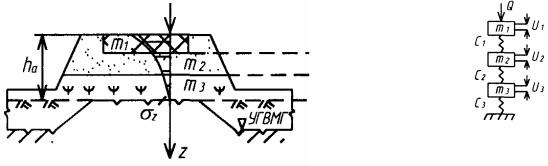
4. Насыпи на вечномерзлых грунтах |
|
|
|
|
|
|
|
|
d2U1 |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
t |
|
|
|
|
|
|
|
m |
C (U |
1 |
U |
2 |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
1 |
|
dt |
2 |
|
|
|
1 |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Q sin |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
железобетон |
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
U3) Qsin |
|
; |
|
|
|||||||||||||
|
|
|
|
|
песок |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
мохоторф . |
|
|
m2 |
d2U2 |
C2(U2 |
U3) |
|||||||||||||||
|
|
|
|
|
вечномерзлый |
|
|
|
|
|
dt2 |
|
||||||||||||||
|
|
|
|
|
грунт |
|
|
|
|
C1(U1 U2 U3) 0; |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
m |
d2U3 |
|
C U |
|
C |
(U |
|
U |
) 0 |
||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
3 dt2 |
|
3 |
|
|
3 |
2 |
|
|
2 |
|
|
3 |
|
||||
81

6. УДАРНО-ИМПУЛЬСНОЕ ВОЗДЕЙСТВИЕ ТРАНСПОРТНЫХ НАГРУЗОК НА КОНСТРУКЦИИ
6.1. Виды волн и колебаний
Учение о волнах и колебаниях известно давно из физики их распределения в жидких, газообразных и твердых телах на макро- и микроуровнях. Волной в твердых телах принято называть изменение равновесного состояния среды в момент внешнего воздействия в виде изменений напряжений, плотности и вещественно проявляющихся в колебаниях. Эти общие определения нуждаются в конкретизации применительно к таким современным объектам, как дорожные конструкции высокоскоростных автомагистралей, взлетно-посадочных полос, аэродромов, где внешнее воздействие транспортных нагрузок отличает быстродействие и они являются источником зарождения волн и колебаний.
Виды волн определяет однородность среды и характер передачи внешней нагрузки на опорную поверхность. Однородное упругое полупространство неограниченных размеров (x = ∞; y = ∞; z = ∞), получая внешнее воздействие от сосредоточенной в точке 0 силы P(t), действующей в течение времени Т0, распределяет его по полусфере радиусом r с площадью 2πr2, причем r2 = z2 + x2 + y2. Материал полупространства при этом сжима-
P t
ется под действием напряжений ф 2 z2 x2 y2 (рис. 6.1, а), обра-
зуя зону сжатия, называемую фронтом волны длиной lф = Т0 · Ср, пропорциональную времени действия нагрузки Т0 и скорости распространения волны сжатия в материале полупространства Ср. Такие волны называют сферическими. После окончания действия напряжений сжатия σф сжатый участок материала полупространства восстанавливается и движется за счет упругих сил в обратном направлении, совершая затухающие колебания
(см. рис. 6.1, а, г).
Реальные нагрузки от современных транспортных средств передаются на поверхность полупространства через площадки с длиной опирания В (см. рис. 6.1, б). Чем больше размер В, тем более однородны контактные давления q(t) и тем больше шансов получить так называемые плоские волны с длиной фронта lф. По отношению к вектору контактных давлений они развиваются вдоль него и их называют продольными со скоростью распространения Ср. Сжатие материала в пределах фронта плоской волны генерирует его расширение по боковым направлениям вдоль осей x и y с об-