Материал: 2308
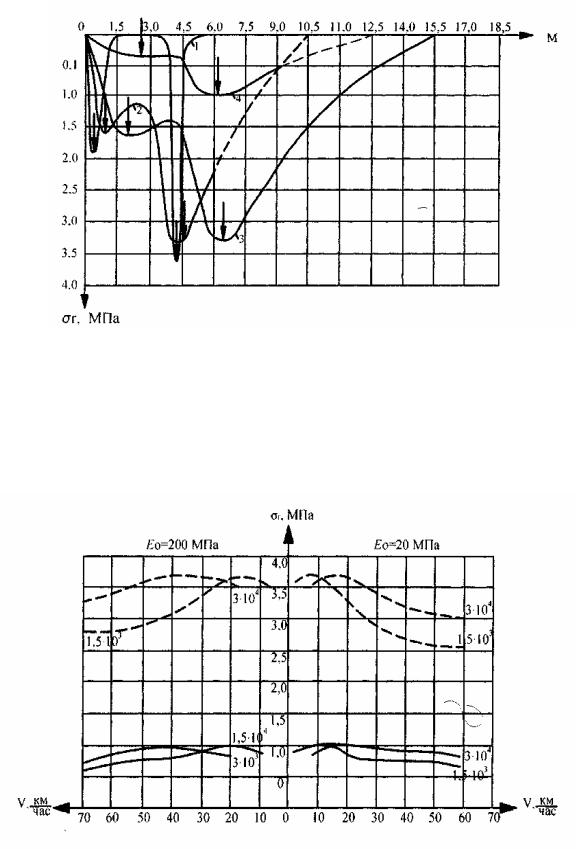
Рис. 3.11. Растягивающие напряжения в покрытиях при последовательном проходе нагрузки в 20 и 40 кН (соответственно первые и вторые стрелки слева направо). Кривые 1,2 – для покрытий толщиной 10 см при модуле упругости Е1 = 1,5·103 МПа, модуле упругости основания Е0 = 200 МПа и скоростях нагрузки 7,9 и 31,6 км/ч. Кривые 3 и 4 – для покрытий в 10 и 20 см толщиной и для скоростей нагрузки в 69,6 и 82 км/ч соответственно. Модули упругости покрытий Е1 = 3·104 МПа; Е0 = 200 МПа
V, км/ч |
|
|
|
V, км/ч |
|
|
|
|
Рис. 3.12. Зависимость растягивающих напряжений в покрытиях от скорости проезда автомобиля с давлением на колесо 40 кН. Цифры на кривых – модули упругости покрытий Е1 (МПа). Е0 – модули упругости оснований. Сплошные и пунктирные линии – соответственно для покрытий толщиной 20 и 10 см
53

Однако все эти выводы касаются случая, когда ровность покрытия гарантирована. В ряде других, когда ровность покрытий отсутствует с начала эксплуатации, что способствует возникновению колебаний автомобиля, или ухудшается со временем под влиянием водно-температурных воздействий, целесообразно вводить в расчеты напряжений и прогибов коэффициенты динамичности. Они представляют собой отношение динамической нагрузки к статическому весу колеса автомобиля.
Наиболее общие данные о коэффициентах динамичности, по данным ряда авторов, приведены в табл. 3.5, из которой видно, что различные авторы получили разные результаты. Однако, используя средние значения для «хороших» по ровности покрытий, приведем в табл. 3.3 и 3.4 значения предельных прогибов и напряжений с учетом динамики автомобиля. Прогибы и напряжения, которые возникают на неровных покрытиях, показаны на рис. 3.13. Динамические напряжения здесь имеют экстремальные зоны по мере увеличения скорости движения автомобиля, а коэффициент динамичности напряжений приближается к 2. Это явление объясняется резонансом в колебаниях автомобиля, приводящим к значительному увеличению динамического давления на покрытие.
V, км/ч
U, мм
Рис. 3.13. Изменение упругих прогибов: а – растягивающих напряжений
впокрытиях; б – в зависимости от скорости движения автомобильной нагрузки
сдавлением на колесо 40 кН и с учетом ее динамичности; сплошные кривые –
сучетом динамического коэффициента, пунктирные – без учета; σст – статические напряжения; 1 – для покрытий толщиной 20 см и модуля упругости Е1 =1,5·103 МПа;
Е0=200 МПа; 2 – для покрытий толщиной 20 см и модуля упругости Е1 =3,0·104 МПа
54
Таким образом, на неровных покрытиях возможно увеличение напряжений, во всяком случае до скорости 50 км/ч (рис. 3.13, б). Прогибы толстых плит при этом не изменятся, так как их уменьшение от снижения времени действия нагрузки компенсируется увеличением за счет роста величин динамичной нагрузки. Это обнаружено экспериментально для жестких цементобетонных покрытий. В дальнейшем при скоростях более 80 км/ч процесс взаимодействия подвижной нагрузки и покрытия становится ударным. При этом прогибы и напряжения вновь возрастут. Однако для этого необходимы иные исходные уравнения, которые будут даны позже.
Таблица 3.5
Коэффициенты динамичности подвижной нагрузки
Автор |
Состояние |
|
Скорость автомобилей, км/ч |
|
||||||
покрытия |
10 |
20 |
30 |
40 |
50 |
60 |
70 |
80 |
||
|
||||||||||
Prof. Dr-Ing. |
Хорошее битумное |
1,37 |
1,40 |
1,43 |
1,45 |
1,47 |
1,50 |
1,52 |
1,54 |
|
покрытие |
||||||||||
P. Koeβler |
|
|
|
|
|
|
|
|
||
Плохое битумное |
|
|
|
|
|
|
|
|
||
(ФРГ) |
1,71 |
1,80 |
1,90 |
1,99 |
2,08 |
2,17 |
2,26 |
2,35 |
||
покрытие |
||||||||||
|
|
|
|
|
|
|
|
|
||
M. Slachta |
Хороший цементо- |
- |
- |
1,55 |
- |
1,45 |
- |
1,65 |
- |
|
(Чехия) |
бетон |
|||||||||
|
|
|
|
|
|
|
|
|||
(Ударная |
Плохой цементобе- |
- |
- |
- |
2,0 |
- |
- |
- |
- |
|
нагрузка) |
тон |
|||||||||
|
|
|
|
|
|
|
|
|||
|
Хороший цементо- |
- |
- |
1,05 |
- |
- |
- |
1,11 |
- |
|
|
бетон |
|||||||||
F.I. Bomhard |
|
|
|
|
|
|
|
|
||
Хороший асфальто- |
- |
- |
1,15 |
- |
- |
- |
1,25 |
- |
||
(ФРГ) |
бетон |
|||||||||
|
|
|
|
|
|
|
|
|||
|
Плохой асфальтобе- |
- |
- |
1,33 |
- |
- |
- |
1,55 |
- |
|
|
тон |
|||||||||
|
|
|
|
|
|
|
|
|
||
|
Хороший асфальто- |
- |
1,06 |
- |
1,10 |
- |
1,30 |
- |
1,40 |
|
В.Н. Кравец |
бетон |
|||||||||
|
|
|
|
|
|
|
|
|||
Плохой асфальтобе- |
- |
1,63 |
- |
2,42 |
- |
3,16 |
- |
3,38 |
||
|
||||||||||
|
тон |
|||||||||
|
|
|
|
|
|
|
|
|
||
|
Хороший асфальто- |
- |
- |
1,33 |
1,36 |
- |
- |
- |
- |
|
А.В. Смирнов |
бетон |
|||||||||
|
|
|
|
|
|
|
|
|||
Плохой асфальтобе- |
- |
- |
1,09 |
- |
1,40 |
- |
1,63 |
1,68 |
||
|
||||||||||
|
тон |
|||||||||
|
|
|
|
|
|
|
|
|
||
Среднее значение коэффициента |
1,37 |
1,42 |
1,38 |
1,72 |
1,60 |
2,03 |
1,56 |
2,07 |
||
динамичности |
|
|||||||||
|
|
|
|
|
|
|
|
|
||
Среднее значение для хороших |
1,21 |
1,23 |
1,34 |
1,33 |
1,46 |
1,40 |
1,38 |
1,47 |
||
покрытий |
|
|||||||||
|
|
|
|
|
|
|
|
|
||
Итак, анализ прогибов и напряжений в упругих плитах, лежащих на упругом винклеровском основании, позволяет установить следующее.
1. При проезде двухосных автомобилей по цементобетонным покрытиям с эксплуатационными скоростями нужно принимать последо-
55
вательное воздействие осей за единый ударный процесс. На покрытиях с малой жесткостью воздействие осей следует рассматривать как независимое.
2.Прогибы дорожных одежд уменьшаются с ростом скорости движения автомобилей, но при достижении 50 км/ч они несколько увеличиваются за счет динамического эффекта автомобиля.
3.Динамические напряжения при изгибе от однократного приложения нагрузки в 40 кН достигают на ровных покрытиях от 1,0 до 3,6 МПа, на неровных – 1,3–5,0 МПа, развиваясь в очень короткое время.
4.Предельные динамические прогибы покрытий составляют 0,10– 0,15 мм для нагрузки 40 кН на колесо и скорости 70 км/ч.
Для скоростей 50 км/ч прогибы могут быть не более 0,10– 0,35 мм. При этих значениях сохраняется постоянным модуль упругости, а значит, сплошность плиты и основания. Однако, рассматривая исходное уравнение (3.23), можно прийти к выводу, что в него входят члены, учитывающие только инерционные свойства плиты и затухание колебаний в ней. Инерционные свойства основания не учтены, а это противоречит опытам и свидетельствует о недостатках модели основания, характеризуемого одним коэффициентом постели.
Недостатки простейшей модели Циммермана-Винклера (Фусса, Эйлера) отмечались еще в 1922 г. Г. Э. Проктором и К. Вигардом. В 1923 г. Н. П. Пузыревский предложил грунтовые основания рассматривать как упругое полупространство. Эта модель стала основной, хотя и довольно сложной. Ее упрощение привело к созданию еще трех моделей оснований (М. М. Филоненко-Бородича, П. Л. Пастернака и однослойной модели В.З. Власова). Эти модели занимают как бы промежуточное место между коэффициентом постели и моделью упругого полупространства.
Впервые учет инерции основания произвели в своих работах А. П. Филиппов, О. Л. Шехтер, В. П. Виксне, Б. Г. Коренев и Я. Г. Пановко. Позднее Р. И. Бляхман получил решение для моментов и перерезывающих сил в бесконечной пластине, лежащей на упругом инерционном основании и загруженной движущейся равномерно распределенной вдоль прямой линии вертикальной нагрузкой. Однако его результаты позволяют сделать вывод, что инерционность полупространства, в той мере, в какой она учтена в его работе, не оказывает существенного
влияния на значения моментов, перерезывающих сил в пластине и реактивных давлений в диапазоне изменения скоростей от 0 вплоть до 600 км/ч. Только при скорости нагрузки, близкой к скорости распространения поперечных волн в полупространстве, изгибающие усилия в пластине возрастают почти в 2 раза.
56
Большое значение имеет методика учета инерционности оснований под плитой. В этом отношении представляет интерес работа В. Е. Ярового о динамическом воздействии движущегося груза на плиту постоянной ширины со свободно опертыми продольными кромками, имеющую вид бесконечной полосы.
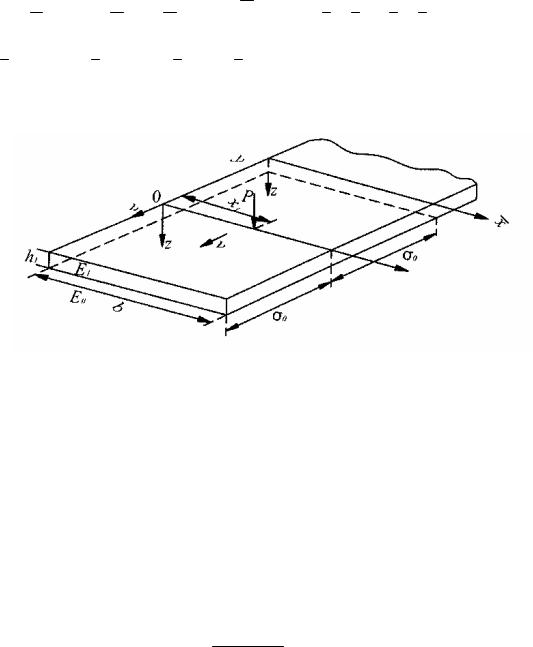
Пусть по плите движется сила Р со скоростью V (рис. 3.14), а основание под плитой представлено однослойной моделью В.З. Власова. В системе координат (х, у, z) для модели такого упругого основания имеем следующее дифференциальное уравнение поперечных колебаний плиты:
|
4 |
|
2r2 2 |
|
S4 |
|
m |
2 |
|
|
|
P |
|
|
x |
|
x |
|
y |
|
y |
, |
(3.27) |
||||||
t2 |
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D 1 |
1 |
1 |
|
|||||||||||
где |
x |
1 const; |
y |
1 V t; |
x |
x; |
y |
Vt; |
σ1 – импульсивная функция первого |
||||||||||||||||||||
порядка ; r2, S4 – обобщенные упругие характеристики плиты и основания на сдвиг и сжатие.
Рис. 3.14. Схема приложения вертикальной сосредоточенной силы к поверхности плиты
Раскладывая нагрузку в ряд и предполагая независимость прогиба под движущейся силой во времени, В. Е. Яровой с помощью метода М. Леви по замене корней дифференциального уравнения тригонометрическим рядом получил после преобразований зависимость для прогиба плиты под действием движущегося груза:
|
P |
|
|
sinK |
n |
x sinK |
n |
x |
|
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
U x, |
|
|
|
|
|
|
2 |
|
|
|
e |
|
|
|
|
|
|
sin n |
|
cos n |
, (3.28) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|||||||||||||||
|
2bD n 1 |
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
||||||
здесь коэффициенты имеют следующие значения: Kn |
|
n |
; b – ширина плиты; x1, x |
||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
E h3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
(см. рис. 3.14); |
x1 |
|
|
|
; |
x b; D |
|
|
1 |
|
1 |
|
|
–цилиндрическая жесткость плиты; δ – |
|||||||||||||||||
|
|
12 1 |
12 |
|
|||||||||||||||||||||||||||
2 |
|||||||||||||||||||||||||||||||
объемный вес плиты, кг/см3; h1 – толщина плиты. 57