Материал: 1926

R(t) 5 10 2 2 e 0,5 t . Скорость движения шасси изменяется от 5 до 45 км/ч с шагом в 10 км/ч. Представьте полученные функциональные зависимости графически. Длина пятна контакта при сглаживании микрорельефа ходовым элементом шасси – 30 см.
6.Для условий, описанных в предыдущем пункте, получите примеры временных зависимостей нормальных реакций на 4-х опорных элементах шасси машины при ее движении, а также функциональные зависимости математического ожидания и дисперсии среднего значения наиболее нагруженной опоры. Определите частоту потери устойчивости машины при всех моделируемых скоростях (ситуация отрыва любой из опор от грунта, что выражается в отрицательном значении нормальной реакции на опоре) при движении в течение 10 минут с количеством независимых экспериментов по 100 для каждой скорости. Частота потери устойчивости равна отношению числа независимых экспериментов, в которых устойчивость была потеряна, к общему числу независимых экспериментов при данной скорости.
7.С использованием учебного пособия [2] замените блоки, задающие движение механизма рабочего оборудования машины (п. 2) элементами пакета SimHydraulics. Параметры элементов гидропривода могут быть приняты равными аналогичным параметрам в примерах [2].
В пояснительной записке к курсовой работе должны быть приведены: расчетная схема механизма, принципиальные упрощенные гидросхемы приводов рабочего оборудования, схема Simulink-диаграммы механизма и привода в обозначениях Simulink, описание всех блоков Simulinkдиаграммы, результаты всех исследований (графики, таблицы) с их текстовым описанием.
Преподавателю сдаются: пояснительная записка в бумажном виде, а также в электронном виде – два файла модели механизма (mdl-файлы): без гидропривода и с гидроприводом.
Список рекомендуемой к изучению литературы
1.Моделирование и визуализация движений механических систем в MATLAB: учебное пособие / В. С. Щербаков [и др.]; СибАДИ. – Омск : СибАДИ, 2008. – 84 с.
2.Моделирование гидравлических систем в MATLAB: учебное пособие / А. А. Руппель, А. А. Сагандыков, М. С. Корытов ; СибАДИ, Кафедра АППиЭ. – Омск : Си-
бАДИ, 2009. – 171 с.
3.Дьяконов В.П. MATLAB 6.5 SP1/7 + Simulink 5/6® в математике и модели-
ровании. Серия «Библиотека профессионала». – М.: СОЛОН-Пресс, 2009. – 576 с. // ЭБС «Книгафонд»
4.SimMechanics User's Guide. Version 2. The MathWorks, Inc., November 2002.
522 p.
5
ПРИЛОЖЕНИЯ
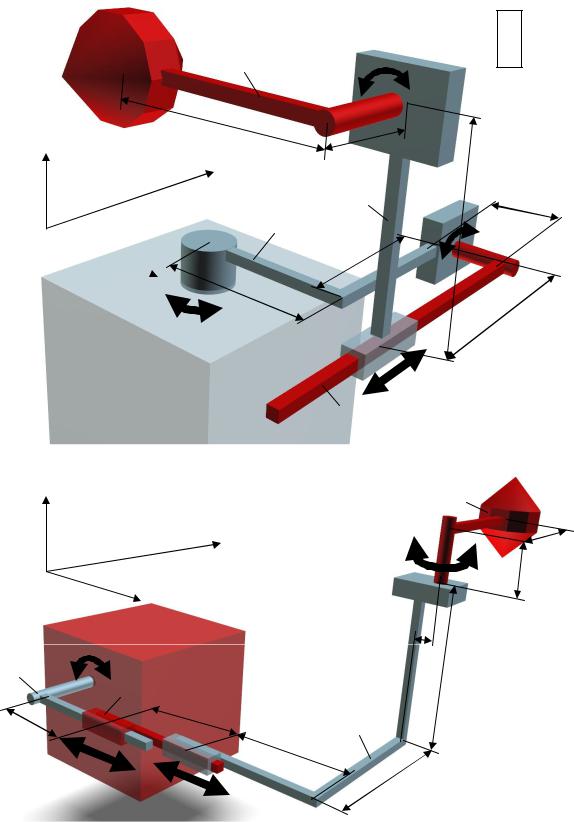
ПРИЛОЖЕНИЕ № 1 РАБОЧИЕ МЕХАНИЗМЫ
m4
l7
Y0 |
X0 |
l6 |
m3
m1
l2
Z0
l1
m2
1
l5
l3
l4
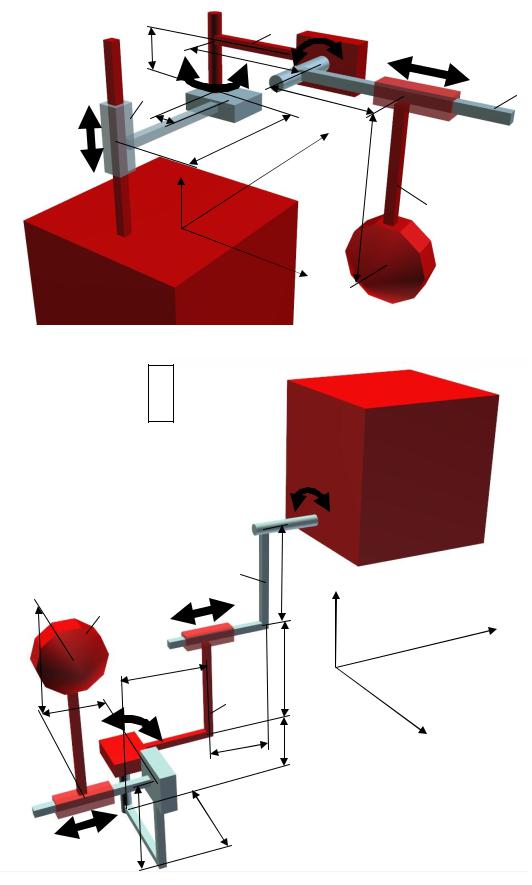
X0 |
|
2 |
m4 |
|
|
|
|||
Y0 |
|
|
|
|
|
|
|
l8 |
|
|
|
|
||
Z0 |
|
|
l7 |
|
|
|
|
||
m1 |
|
|
l6 |
|
|
|
l5 |
||
m2 |
|
|
||
|
|
|
||
l2 |
|
|
m3 |
|
l1 |
l3 |
|||
|
||||
|
|
|
l4 |
|
6
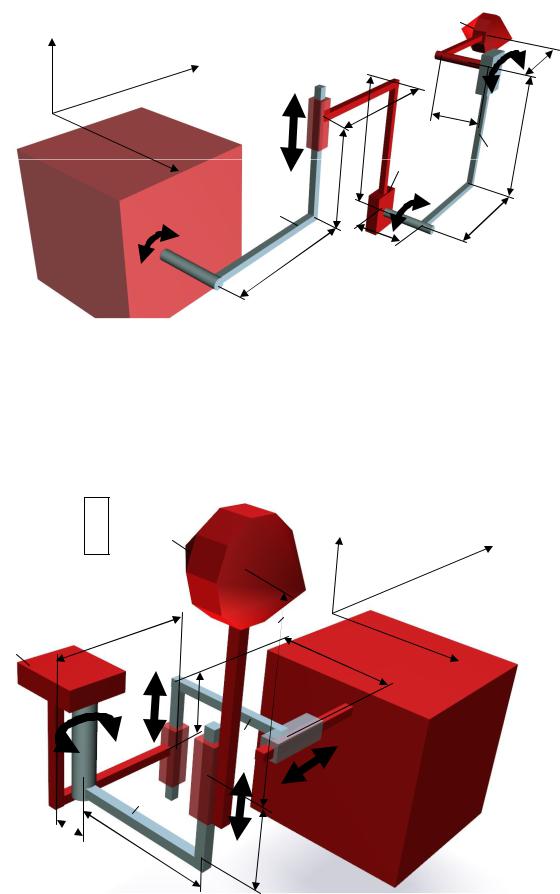
l3 |
m2 |
|
3 |
|
|
|
|
||
|
|
|
|
|
m1 |
l4 |
|
|
m3 |
|
|
|||
|
|
|
||
|
|
l5 |
||
l2 |
l1 |
|
|
|
|
X0 |
|||
|
|
|||
Y0 |
|
l6 |
||
|
|
m4 |
||
|
|
Z0 |
||
4
m1 l1
m4 |
Y0 |
|
X0 |
||
|
l9
l6 l2
l8 m2
l4 |
Z0 |
l3 |
 l5 l7 m3
l5 l7 m3
7
|
|
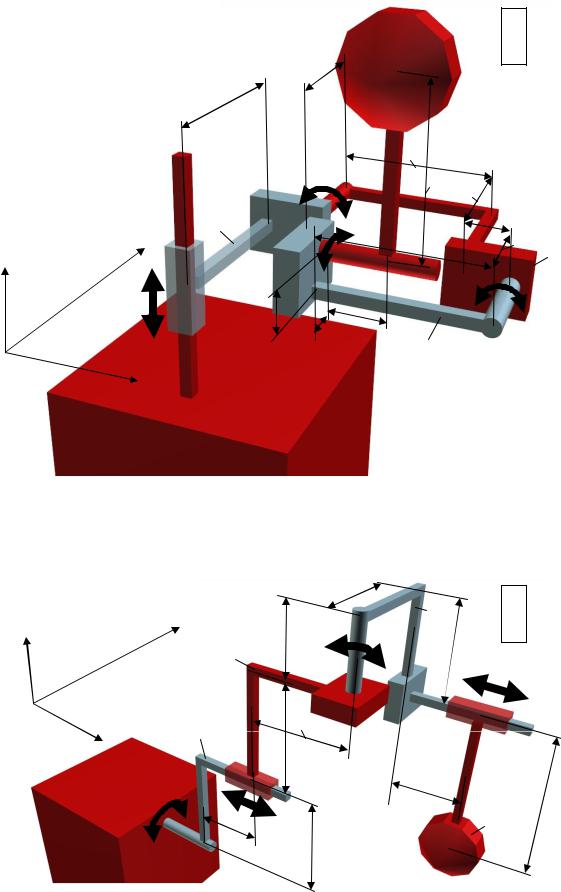
5 |
|
m4 |
Y0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
l9 |
|
X0 |
|||
|
|
|
l4 |
l7 |
|
|
|
l3 |
l8 |
|
|
|
m2 |
m3 |
|
|
|
l2 |
|
|
Z0 |
|
||
|
|
m1 |
l6 |
|
|
|
|
l5 |
|
|
|
|
|
|
|
|
|
l1 |
|
6 m4 X0 Y0
l3 |
l7 |
|
m2 |
l1 |
Z0 |
|
|
l2
m1
m3
l4
l5 l6
8
l3
l2 l1 
m1
X0 |
l9 |
Y0
l10
l12
l11
Z0
l6
Y0 |
X0 m2 l5 |
m1 l4
Z0
l3
l1
l2
7
 m4
m4
l4
l5 l6
m3
m3
l7
l8
l7
l8
m2
8
l9
m4
9