Материал: 1856
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
ВОРОНЕЖСКАЯ ГОСУДАРСТВЕННАЯ ЛЕСОТЕХНИЧЕСКАЯ АКАДЕМИЯ
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Методические указания к выполнению лабораторных работ
для студентов специальности 220301 – Автоматизация технологических процессов и произ-
водств в лесном комплексе Часть 2
ВОРОНЕЖ 2004
2
УДК 681.5
Петровский В.С. Теория автоматического управления: Методические указания к выполнению лабораторных работ для студентов специальности 220301
– Автоматизация технологических процессов и производств в лесном комплексе /В.С. Петровский, Д.А. Глухов; ВГЛТА.− Воронеж, 2004. – 35 с.
Печатается по решению редакционно-издательского совета ВГЛТА
Рецензент доктор техн. наук, профессор, зав. кафедрой АТП ВГАСУ В.Д.Волков
Ответственный редактор кандидат техн. наук,
доцент кафедры АПП ВГЛТА С.И. Поляков
3
Лабораторная работа №1 Исследование устойчивости и качества АСР, состоящей из объекта
1-го порядка и ПИ-регулятора Цель работы: провести анализ устойчивости системы, состоящей из
объекта, представляющего собой апериодическое звено 1-го порядка и ПИрегулятора.
Краткие теоретические сведения
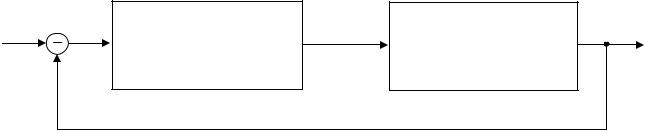
Структурная схема АСР представлена на рис.1.1.
G(t) |
Wрег |
(P) |
Wоб (P) Y(t) |
|
Рис.1.1 Структурная схема АСР
Передаточная функция регулятора
W |
|
(P) = k |
|
|
+ |
kрег |
. |
(1.1) |
|||||
рег |
рег |
|
|
||||||||||
|
|
|
|
t |
и |
P |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Передаточная функция объекта |
|
|
|
|
|
|
|
|
|
|
|||
Wоб ( p) = |
|
|
kоб |
|
|
|
, |
|
(1.2) |
||||
Tоб |
|
P +1 |
|
||||||||||
|
|
|
|
|
|
||||||||
где kрег ,kоб − коэффициенты усиления регулятора и объекта; Tоб − постоянная времени объекта;
tи − время изодрома;
P − параметр Лапласа, который при нулевых начальных условиях отожде-
ствляется с оператором дифференцирования |
|
d |
. |
|
|
|
|||||
|
|
|
|
|
|||||||
|
|
|
|
|
|
dt |
|
|
|
||
Передаточная |
функция |
системы |
в |
|
|
разомкнутом |
состоянии |
||||
Wраз (P) =Wрег (P) Wоб (P) , в замкнутом состоянии с отрицательной обрат- |
|||||||||||
ной связью |
|
|
|
|
|
|
|
|
|
|
|
|
W |
|
(P) = |
Wраз (P) |
|
|
= |
Y(P) |
, |
(1.3) |
|
|
зам |
|
|
|
|
||||||
|
1+Wраз (P) |
G(P) |
|||||||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
||||
где Y(P) − изображение по Лапласу регулируемого параметра;
4
G(P) − изображение по Лапласу управляющего (задающего) воздействия системы регулирования.
Следовательно, дифференциальное уравнение АСР в операторной форме имеет вид
Y(P) (1+Wрег (P) Wоб (P)) = G(P) Wрег (P) Wоб (P). |
(1.4) |
Подставив в уравнение (1.4) передаточные функции объекта (1.2) и регулятора (1.1) и проведя необходимые преобразования с переходом к оригиналам функций y(t), g(t) , получим дифференциальное уравнение линейной системы автоматического регулирования
|
T |
|
t |
и |
|
|
|
d2 y |
+ (t |
|
|
+ |
|
|
t |
и |
|
|
) |
dy |
+ y = t |
|
|
dg |
+ g. |
(1.5) |
|||||||
|
|
об |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
k |
|
k |
|
|
|
|
dt2 |
и |
k |
|
k |
|
|
|
dt |
и |
dt |
|||||||||||||||
|
об |
рег |
|
|
об |
рег |
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Характеристическое уравнение имеет вид |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
1+W |
рег |
(P) W |
|
|
(P) = A P2 |
+ A P + A , |
(1.6) |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
об |
|
|
|
|
|
0 |
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|
||||||
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A = |
Tоб tи |
|
|
; |
|
A = t |
|
+ |
|
|
|
|
tи |
; |
|
A =1. |
(1.7) |
||||||||||||
|
|
|
|
|
|
|
и |
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
0 |
|
|
|
kоб kрег |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kоб |
k рег |
|
|
2 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Построим кривую переходного процесса, используя классический метод решения дифференциального уравнения (1.5) для скачкообразного управляющего воздействия g(t) =g01(t), (g0 = const) . Процесс регулирования опре-
деляется в виде
|
y(t) = yуст (t) + yпер (t), |
(1.8) |
где |
yуст (t) − установившаяся составляющая; yпер (t) − переходная составляю- |
|
|
n |
|
щая; |
yпер (t) = ∑Ck l Pk t , где Pk −корни характеристического уравнения (1.6); |
|
|
k =1 |
|
Ck − постоянные интегрирования, зависящие от начальных условий. Численные значения постоянных C1,C2 ,...,Cn находятся из реализации теоремы
о начальном значении оригинала функции и её производных и решения системы n − линейных алгебраических уравнений с n неизвестными
n |
|
|
|
|
y(i) (t) = y(устi) (t) + ∑(Pk )i Ck |
l Pk t ; i = 0,1,2,...,n −1. |
(1.9) |
||
k=1 |
|
|
|
|
Установившаяся составляющая |
|
|||
y (t)=t |
dg |
+g=1. |
(1.10) |
|
|
||||
уст |
и dt |
|
||
Так как характеристическое уравнение (1.6) имеет два корня, переходная составляющая имеет два члена
5
y |
пер |
(t) = C lP t1 |
+ C |
2 |
lP2 t . |
(1.11) |
|
1 |
|
|
|
Подставив (1.10) и (1.11) в (1.8), получим кривую переходного процесса системы
y(t) =1+ C lP t1 |
+ C |
2 |
lP2 t . |
(1.12) |
1 |
|
|
|
Постоянные интегрирования C1,C2 |
из уравнения (1.12) находятся из |
|
|
|||||||||||||||||||||
системы, состоящей из двух уравнений и имеющей два неизвестных |
|
|
||||||||||||||||||||||
|
|
|
|
|
+ C1 |
lP t1 |
+ C2 |
lP2 t |
= 0; |
|
|
|
|
|
|
|
||||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
(1.13) |
||||||||||
|
|
|
|
|
|
|
P lP t11 + C |
|
P lP t12 = |
|
|
|
|
|
||||||||||
|
|
|
|
C |
2 |
0. |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
1 |
1 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 1.1 |
||
|
Варианты исходных данных |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
№ |
1 |
2 |
3 |
4 |
|
|
5 |
|
6 |
|
7 |
|
|
|
8 |
|
9 |
|
10 |
11 |
12 |
13 |
14 |
15 |
kоб |
2,0 |
2,2 |
2,4 |
2,6 |
|
|
2,8 |
|
3,0 |
3,2 |
3,4 |
3,6 |
|
3,8 |
4,0 |
4,2 |
4,4 |
4,6 |
4,8 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
15 |
20 |
25 |
30 |
|
|
35 |
|
40 |
|
45 |
|
|
50 |
55 |
|
60 |
65 |
70 |
75 |
80 |
85 |
||
об |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Порядок выполнения работы
1Задать исходные данные, присвоив переменным kрег ,tи ,kоб ,Tоб значения. kоб и Tоб определяются в соответствии с вариантом, предложенным преподавателем табл.1.1. kрег и tи задаётся из диапазона 0,1...60. Входная величина g = 1. Для этого необходимо:
•ввести в желаемом месте документа имя переменной;
•ввести оператор присваивания с помощью клавиши <:> или нажатием соответствующей кнопки Definition (Присваивание) на панели инструментов Calculator (Калькулятор) или Evaluation (Выражение);
•ввести в появившейся местозаполнитель значение переменной.
2Далее следует найти корни характеристического уравнения (1.6). Для этого необходимо вычислить коэффициенты A0 , A1, A2 по формулам
(1.7). Корни уравнения (1.6) определяются, используя встроенную функцию polyroots(v) , где v − вектор, составленный из коэффициентов характеристического уравнения. Возвращающим значением данной функции будет вектор, составленный из корней рассматриваемого уравнения рис.1.2.
Для построения вектора нужно, поставив курсор в местозаполнитель, с помощью клавиши <Ctrl>+<C> или нажатием соответствующей кнопки Matrix or Vector (Создание матрицы или вектора) на панели инструментов Matrix (Матрица) вызвать окно Insert Matrix (Вставить матрицу), где задать число столбцов (для вектора равно 1) и строк.