Материал: 1070
|
|
|
Ae, л |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,1 |
|
|
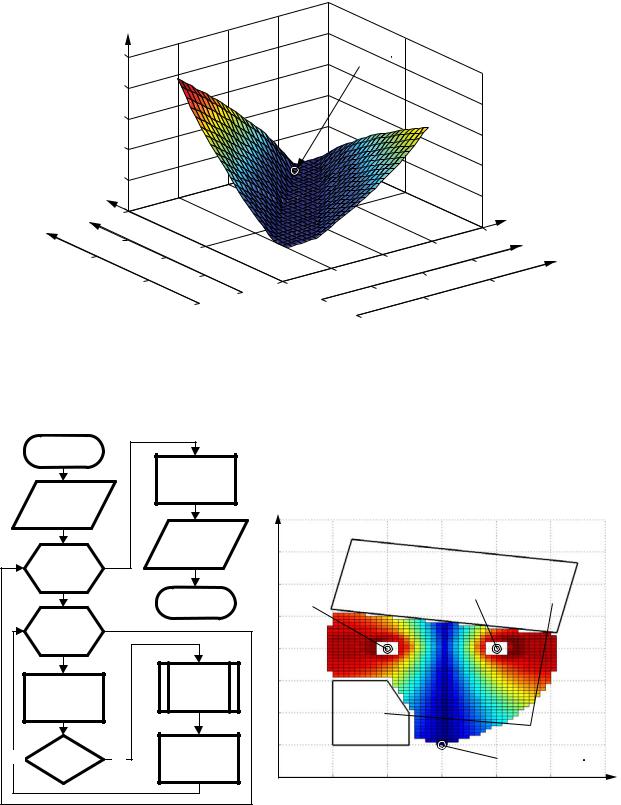
Точка минимума, Ae=8,274 10-3 л |
|
|
|
|
||||
|
|
|
0,08 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,06 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,04 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,02 |
|
|
|
|
|
|
|
|
|
|
|
|
|
q8 кон, рад |
|
|
|
|
|
|
|
|
|
|
|
|
|
q9 кон, м |
1 |
|
|
|
|
|
|
|
|
|
q8 нач, рад |
||
q10 кон, м |
10 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
1 |
q9 нач, м |
||||
|
15 |
|
8 |
|
|
0,5 |
|
|
|
|
0,8 |
|||
|
|
10 |
|
6 |
|
|
|
0,6 |
8 |
10 |
q10 нач, м |
|||
|
|
|
5 |
4 |
|
|
0,4 |
6 |
|
15 |
||||
|
|
|
|
|
|
0 |
|
10 |
|
|||||
|
|
|
|
|
2 |
0,2 |
4 |
|
||||||
|
|
|
|
|
|
5 |
|
|||||||
|
|
|
|
|
|
0 |
|
2 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
Рисунок 9 – Зависимость целевой функции от управляемых координат в |
||||||||||||
|
|
|
|
|
|
начальной и конечной точках (пример) |
|
|
|
|||||
|
Начало |
|
|
qнач=[q7начq8нач |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
q9начq10нач]; |
|
|
|
|
|
|
|
|
|
|
Ввод |
|
|
qкон=[q7конq8кон |
|
|
|
|
|
|
|
||
|
|
|
|
|
q9конq10кон]; |
|
|
|
|
|
|
|
|
|
|
исходных |
|
|
|
|
|
|
|
|
|
|
|
||
|
данных |
|
|
|
Ввод |
|
Z0, |
|
|
|
|
|
|
|
|
|
|
|
|
|
результатов: |
|
м |
|
|
|
|
|
|
|
xш0=xш0min |
|
|
|
AeГлоб; q1; q3; |
|
20 |
|
|
|
|
|
|
|
|
|
xш…0max |
|
|
|
qнач; qкон |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
15 |
|
|
Конечная точка |
|
|||
|
|
|
|
|
|
Конец |
|
Начальнаяточка |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
zш0=zш0min |
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
zш…0max |
|
|
|
|
|
5 |
|
|
|
|
|
|
|
Определение |
|
|
Вычисление |
|
0 |
|
|
|
|
|
|
||
|
|
|
Aexш0,zш0 |
|
|
|
|
|
|
|
|
|||
|
|
числа |
|
|
|
|
|
|
|
|
|
|
|
|
|
пересеченийn |
|
|
|
|
-5 |
|
|
|
|
|
|
||
|
|
|
|
|
|
Aeглоб= |
|
-10 |
|
|
|
|
Запретные зоны |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Нет |
n четное |
Да |
|
|
=min{Aexш0,zш0}; |
|
|
|
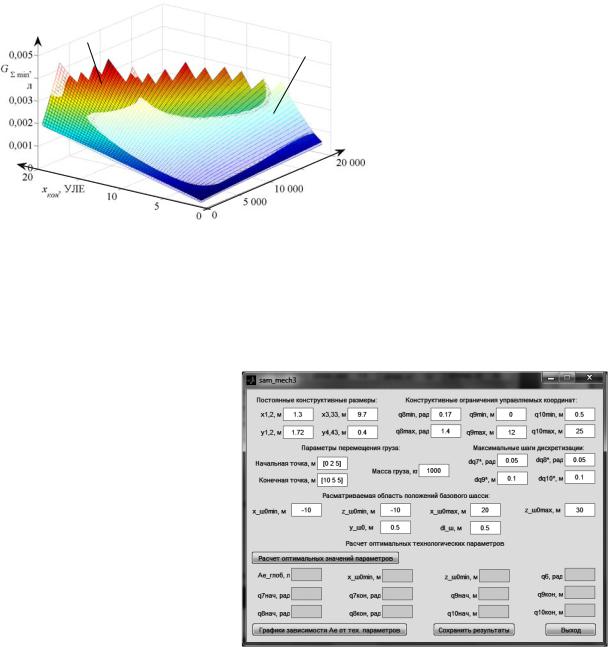
Точка минимума, Ae=1,246 10-3 л |
|||||
|
|
q1=xш0опт; |
|
-15 |
|
|
||||||||
|
|
|
|
|
|
q3=zш0опт |
|
-5 |
0 |
5 |
10 |
15 |
X0, м |
|
|
|
|
|
|
|
|
|
-10 |
||||||
|
|
Рисунок 10 – Блок-схема |
|
|
Рисунок 11 – Зависимость критерия |
|||||||||
|
|
алгоритма определения |
|
|
||||||||||
|
|
оптимальных значений |
|
|
энергетической эффективности Ae от |
|||||||||
|
координат базового шасси |
|
|
положений базового шасси q1, q3 (пример) |
||||||||||
|
|
|
|
|
|
|
|
|
16 |
|
|
|
|
|
|
|
|
|
|
|
На |
основе |
данной |
|
|
|
|
По уравнениям регрессии |
методики |
|
разработан |
|||
|
|
|
модуль, входящий в состав |
||||||
|
|
|
|
По экспериментальнымданным |
|||||
|
|
|
системы |
автоматизации |
|||||
Aemin, |
|||||||||
л |
|
|
моделирования, |
|
подт- |
||||
|
|
||||||||
|
|
|
|
|
|
верждающий |
работоспо- |
||
|
|
|
|
|
|
собность методики (рису- |
|||
|
|
|
|
|
|
нок 13). В качестве |
|||
|
|
|
|
|
mгр, кг |
примера, |
иллюстрирующе- |
||
|
|
|
xкон, м |
|
|
го работоспособность мето- |
|||
|
|
|
|
|
|
||||
|
|
|
|
|
|
дики, получены зависимос- |
|||
|
|
|
|
|
|
||||
|
|
|
Рисунок 12 – Аппроксимация зависимости |
ти критерия эффективнос- |
|||||
|
минимальных затрат топлива Aemin от массы |
ти от высотных координат |
|||||||
перемещаемого груза mгр и расстояния между |
начальной |
и |
конечной |
||||||
начальной и конечной точками xкон (пример) |
точек, расстояния |
между |
|||||||
|
|
|
|
|
|
||||
начальной и конечной точками, массы груза. Проведена аппроксимация полученных зависимостей (рисунок 12).
Разработанные алгорит- |
|
|||||
мы и методики легли в основу |
|
|||||
системы автоматизации моде- |
|
|||||
лирования СГК. Вид окна |
|
|||||
главного |
меню |
|
системы |
|
||
автоматизации |
моделирования |
|
||||
СГКпоказано нарисунке14, а. |
|
|||||
Графический |
|
интерфейс |
|
|||
системы |
позволяет |
вводить |
|
|||
параметры подсистем СГК и |
|
|||||
его элементов, |
параметры |
|
||||
моделирования, |
|
возму- |
|
|||
щающие |
и |
управляющие |
|
|||
воздействия, |
|
параметры |
|
|||
вывода |
результатов |
в |
Рисунок 13 – Вид окна оптимизации |
|||
математическую |
|
модель |
параметров рабочего процесса |
|||
(рисунок |
14, |
|
б). |
Вывод |
|
|
результатов моделирования осуществляется в графическом и табличном виде. Также возможен просмотр пространственных движений механической подсистемы СГК в виде трехмерной анимации (рисунок 14, в). Разработанное программное обеспечение внедрено в ОАО «Конструкторское бюро транспортногомашиностроения» городаОмска.
В пятой главе изложены результаты экспериментальных исследований СГК в реальных производственных условиях. Экспериментальные исследования производились на автокране Ивановец КС-45717К-2. В качестве регистратора параметров использовался прибор безопасности и его датчики, стационарноустановленныенаСГК.
17
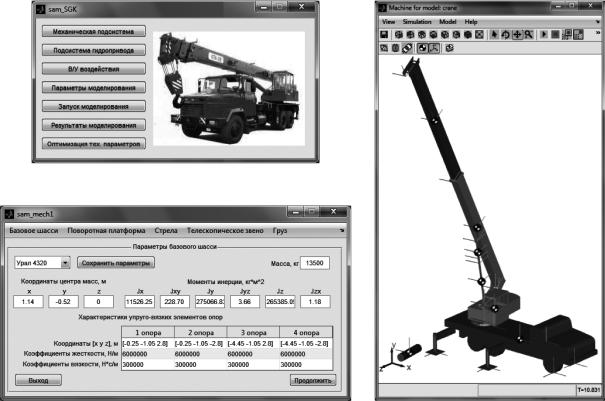
a)
б) |
в) |
Рисунок 14 – Графический интерфейс системы автоматизации моделирования СГК: a) вид окна главного меню; б) вид окна ввода параметров базового шасси СГК; в) вид окна трехмерной анимации механической подсистемы СГК в процессе моделирования (пример)
Проведенные экспериментальные исследования позволили составить уравнения регрессии максимальных рациональных скоростей изменения управляемых координат СГК от массы груза и грузового момента, получить численные значения параметров, входящих в математическую модель СГК и подтвердить адекватность математической модели. Расхождение значений параметров, полученных теоретически и экспериментально, не превышает 12%.
ОСНОВНЫЕ РЕЗУЛЬТАТЫ И ВЫВОДЫ
1.Разработанные математические модели подсистем сложной динамической системы СГК: механической подсистемы, подсистемы гидропривода и ДВС, позволили решить задачи анализа, выявить закономерности влияния параметров модели на критерий эффективности. Проеденные экспериментальные исследования показали, что расхождения численных значений параметров не превышает 12%, что позволило подтвердить адекватность математических моделей.
2.Обоснованный критерий энергетической эффективности перемещения грузов в пространстве конфигураций СГК, представляет
18
собой приращение расхода топлива по управляемым обобщенным координатам относительно расхода топлива в режиме холостого хода;
3.Полученные многофакторные регрессионные уравнения, устанавливающие взаимосвязь удельных энергетических затрат при изменении управляемых координат СГК, от технологических параметров рабочего процесса, позволили определить расход топлива ДВС при выполнении заданных перемещений грузов, оптимизировать траектории перемещения груза по энергетическому критерию;
4.Разработанные методика и алгоритмы оптимизации технологических параметров рабочего процесса СГК позволили выявить закономерности, связывающие технологические параметры с критерием эффективности. Предложенные методика и алгоритм позволяют, в автоматизированном режиме путем оптимизации технологических параметров рабочего процесса СКГ для различных значений конструктивных параметров, решать задачи синтеза оптимальных конструктивных параметров СГК;
5.Разработанные алгоритмы и программное обеспечение подтвердило эффективность предложенных методик оптимизации технологических параметров рабочего процесса и методику автоматизации моделирования сложной динамической системы СГК.
СПИСОК ПУБЛИКАЦИЙ
В изданиях из перечня ВАК:
1.Котькин С.В., Корытов М.С., Щербаков В.С. Методика решения обратной кинематической задачи грузоподъемного крана // Вестник Сибирской государственной автомобильно-дорожной академии. 2011. № 2 (20). С. 71–76.
2.Котькин С.В., Софин А.Н. Моделирование рабочего оборудования гидравлического экскаватора с помощью Matlab // Вестник Академии военных наук. 2011. № 2 (35). С. 179–185.
3.Котькин С.В., Корытов М.С., Щербаков В.С. Экспериментальные исследования рабочего процесса стрелового гидравлического автокрана // Вестник Сибирской государственной автомобильно-дорожной академии. 2012. № 1 (24). С. 73–78.
4.Котькин С.В., Корытов М.С., Щербаков В.С. Построение регрессионной модели определения энергетических затрат рабочего процесса грузоподъемного крана // Вестник Воронежского государственного технического университета. 2012. Т. 8, № 3. С. 92–95.
В других изданиях:
5.Котькин С.В. Simmechanics как система автоматизации моделирования строительных и дорожных машин // Сборник научных трудов. Вып. 8. Омск: ОИВТ (филиал) ФГОУ ВПО НГАВТ, 2010. С. 100–104.
6.Котькин С.В. Использование Simmechanics при моделировании рабочего оборудования строительных и дорожных машин // Теоретические
19
знания – в практические дела: Сборник научных статей XI Всероссийской научно-инновационной конференции аспирантов, студентов и молодых ученых. Ч. 2. Омск: Филиал ГОУ ВПО «РосЗИТЛП» в г. Омске, 2010. С. 156–158.
7.Котькин С.В. Моделирование элементов рабочего оборудования строительных машин в Simmechanics // Материалы 64 научно-технической конференции ГОУ «СибАДИ» в рамках юбилейного международного конгресса, посвященного 80-летию академии. Кн. 1. Омск: СибАДИ, 2010.
С. 306–310.
8.Котькин С.В. Моделирование механической подсистемы рабочего оборудования гидравлического экскаватора в Matlab // Теоретические знания – в практические дела: Сборник научных статей XII Международной научно-инновационной конференции аспирантов, студентов и молодых ученых. Ч. 2. Омск: Филиал ГОУ ВПО «РосЗИТЛП»
вг. Омске, 2011. С. 337–341.
9.Котькин С.В., Щербаков В.С., Корытов М.С. Simulink-модель двигателя внутреннего сгорания грузоподъемного крана // Вестник Сибирского отделения Академии военных наук. 2011. № 10. С. 393–398.
10.Котькин С.В. Моделирование стрелового грузоподъемного крана
всреде Simulink // Современная техника и технологии: проблемы, состояние и перспективы: Материалы I всероссийской научно-технической конференции 23–25 ноября 2011 г. Рубцовск: Рубцовский индустриальный институт, 2011. С. 588–593.
11.Котькин С.В., Корытов М.С. Обоснование критерия оценки эффективности перемещения груза грузоподъемным краном // Научные труды молодых ученых, аспирантов и студентов. Межвузовский сборник.
Вып. 9. Омск: СибАДИ, 2012. С. 116–119.
12.Электронный ресурс «Алгоритм оптимального по энергетическим затратам управления рабочим оборудованием стрелового грузоподъемного крана для реализации заданного перемещения груза в пространстве»: свидетельство о регистрацииэлектронного ресурса ОФЕРНИО № 18055 / С.В Котькин, М.С. Корытов, В.С. Щербаков. Инв.номер ВНТИЦ № 50201250381;
заявл. 03.03.2012; опубл. 26.03.2012. 1 с.
Подписанокпечати10.04.2012.
Формат60 90 1/16. Бумагаписчая Оперативныйспособпечати ГарнитураTimes New Roman Усл. п. л. 1,25, уч.-изд. л. 0,95.
Тираж120 экз. Заказ№121
____________________________________________________________________________
ОтпечатановподразделенииоперативнойполиграфииУМУ ФГБОУВПО«СибАДИ»
644080, г. Омск, пр. Мира, 5.