Материал: 1070
где ρT – плотность топлива (кг/м3); ge – удельный расход топлива (кг/Вт·час); Nд – мощность (Вт).
На рисунке 5 представлена структурная схема моделирования уравнений ДВС с регулятором в среде Simulink.
1 |
|
w |
|
|
|
|
|
|
Md(w, z) |
|
-K- |
|
s |
|
|
M'd(w) |
|
|
|
|
|
|
|
dw/dt |
|
|
|
|
|
|
|
|
|
|
|
|||
Integrator |
|
Lookup Table |
M_z |
|
-K- |
|
|
|
|
|
Gain1 |
|
|
|
Mz |
|
k |
|
|
|
|
|
|||
1 |
|
|
Constant |
|
Gain |
|
|
|
2 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|||
w |
|
|
|
|
|
|
|
|
Md |
|
Mc |
|
1 |
|
-K- |
|
|
-K- |
|
|
|
|
|
-K- |
|
s |
z |
|
|
Gain3 |
|
|
|
|
Gain4 |
|
||
|
|
|
|
|
|
|
|
|||||
Integrator1 |
|
Gain2 |
|
|
c_1 |
|
|
|
|
|||
|
|
|
|
|
c |
F_1 |
F |
|
|
|||
|
|
|
|
|
|
Constant2 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
|
|
a_1 |
|
|
|
|
Constant3 |
|
|
|
||
|
|
a |
|
|
|
|
|
|
|
|
||
|
|
Constant1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dz/dt |
|
|
|
|
|
|
|
Рисунок 5 – Структурная схема моделирования двигателя внутреннего |
|
|
||||||||||
|
|
|
сгорания с регулятором в Simulink |
|
|
|
|
|||||
В четвертой главе обоснован критерий энергетической эффективности перемещения груза в пространстве конфигураций СГК, который представляет собой затраты топлива, израсходованного ДВС:
Ae = A7 A8 A9 A10 AT =
q7 кон |
|
q8кон |
q9 кон |
q10 кон |
(3) |
= G7 dq7 |
|
G8 dq8 |
G9 dq9 |
G10 dq10 T kT , |
|
q7 нач |
|
q8нач |
q9 нач |
q10 нач |
|
где qiнач и qiкон – соответственно начальное и конечное интервальные значения управляемой координаты qi; Gi – удельные энергетические
затраты при изменении управляемой координаты qi; i [7;10] – номер управляемой обобщенной координаты; AT – затраты топлива ДВС при некоторой заданной для рабочего режима угловой скорости вала в отсутствии перемещений рабочего оборудования; T – время перемещений; kT – эмпирический коэффициент пропорциональности.
Управляемые координаты изменяются с рациональными скоростями, являющимися функциями массы поднимаемого груза и грузового момента, учитывающими конструктивные ограничения и ограничения, которые устанавливает человек-оператор. Целевая функция оптимизации рабочего процесса СГК: Ae min.
На имитационной модели проведен полный факторный эксперимент. Экспериментальные исследования были проведены на СГК различных марок. В качестве примера представлены результаты экспериментальных
11
исследований и результаты имитационного моделирования крана Ивановец КС-45717. В процессе исследований были выявлены факторы, оказывающие влияние на удельные затраты топлива G7…G10, значения управляемых координат: угла наклона стрелы q8, длины стрелы q9 и массы груза mгр. Установлено, что значения управляемых координат угла поворота платформы q7 и длины грузового каната q10 не оказывают существенного влияния на изменения удельных затрат G7…G10, создаваемых управляемыми координатами q7…q10 на фоне затрат топлива
врежиме холостого хода. Значения факторов q8, q9 варьировались в пределах конструктивных ограничений СГК. Значение верхней границы
предела варьирования фактора mгр определялось согласно диаграмме грузоподъемности СГК. По результатам обработки экспериментальных данных получены уравнения регрессии, аппроксимирующие зависимости приращений удельных затрат топлива G7…G9 относительно затрат топлива
врежиме холостого хода при изменении управляемых координат q7…q9 (единицы измерения: л/рад для q7 и q8; л/м для q9):
|
|
G |
7 |
G |
9 |
= b b m |
гр |
b m2 |
|
b q |
9 |
b q |
9 |
m |
гр |
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|
|
|
3 |
|
|
гр |
|
|
4 |
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
b q |
9 |
m2 |
b q2 |
b q2 |
m |
гр |
b q2 |
m2 |
|
b q |
8 |
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
6 |
|
|
|
гр |
|
7 |
|
9 |
|
|
|
8 |
9 |
|
|
|
|
9 |
|
|
9 |
|
|
гр |
|
|
|
|
10 |
|
|
|
|
|
|
|||||||||||||||
|
b q |
8 |
m |
гр |
b q |
8 |
m |
2 |
b q |
8 |
q |
9 |
b q |
8 |
q |
9 |
m |
гр |
|
|
|
|||||||||||||||||||||||||||||||
|
|
11 |
|
|
|
|
|
|
12 |
|
|
|
|
гр |
|
13 |
|
|
|
|
|
|
|
14 |
|
|
|
|
|
|
|
|
(4) |
|||||||||||||||||||
b |
q |
8 |
q |
9 |
m2 |
b |
|
|
q |
8 |
q2 |
b |
|
q |
8 |
q2 |
m |
гр |
b |
|
q |
8 |
q |
2 |
|
m2 |
||||||||||||||||||||||||||
15 |
|
|
|
|
гр |
|
16 |
|
|
|
|
9 |
|
17 |
|
|
|
|
9 |
|
|
|
|
18 |
|
|
|
|
|
|
9 |
|
|
гр |
|
|||||||||||||||||
b q2 |
|
b q |
2 |
m |
гр |
b q |
2 |
m2 |
|
b q2 |
q |
9 |
b q2 |
q |
9 |
m |
гр |
|
||||||||||||||||||||||||||||||||||
19 |
8 |
|
|
|
20 |
|
|
8 |
|
|
|
|
21 |
|
8 |
гр |
|
|
|
|
22 |
|
8 |
|
|
|
|
23 |
|
|
|
8 |
|
|
|
|
|
|
||||||||||||||
b |
24 |
q |
2 |
q |
9 |
m2 |
b |
25 |
q2 |
q |
2 |
b |
26 |
q2 |
q |
2 |
m |
гр |
b q2 |
q2 |
m2 . |
|||||||||||||||||||||||||||||||
|
|
8 |
|
|
|
|
|
гр |
|
|
|
|
8 |
|
9 |
|
|
|
8 |
|
9 |
|
|
|
|
27 |
|
|
|
8 |
|
|
|
|
9 |
|
гр |
|
||||||||||||||
Уравнение регрессии удельных затрат топлива G10 (единица измерения л/м), отнесенных к изменению управляемой координаты q10, зависит только от одного из трех учитываемых факторов – массы груза mгр, и имеет вид:
G10 = (b1 b2 mгр )2 . |
(5) |
В уравнениях регрессии (4, 5) режимам подъема и опускания груза соответствуют разные значения коэффициентов. Все коэффициенты уравнений регрессии (4, 5), согласно t-критерию Стьюдента, значимы. Максимальная относительная погрешность аппроксимации не превышает 3,4%. Показатели качества полученных уравнений регрессии свидетельствуют о высокой объясняющей способности регрессии. В качестве примера на рисунке 6 представлены графические зависимости удельных затрат топлива при изменении управляемых координат, как функции технологических параметров рабочего процесса: q8, q9, mгр.
12

G7,
л/рад 24000 кг
q8, рад |
|
||
G9, |
|
|
24000 кг |
|
|||
л/м |
|
|
|
|
|
|
|
q8, рад
G7,
л/рад 8250 кг
6250 кг
4250 кг
2250 кг
250 кг
250 кг |
G8, |
л/рад |
24000 кг
q9, м q8, рад
G10, |
|
24000 кг |
|
л/м |
|
|
250 кг
q8, рад
q9, м
q9=0 м |
G9, |
|
|
л/м |
q9=0 м |
||
|
|||
|
|
24000 кг
mгр=250… 24000 кг
q8, рад
250 кг
q9, м
250 кг
q9, м
24000 кг
6250 кг
4250 кг
2250 кг
250 кг q8, рад
Рисунок 6 – Зависимости удельных затрат топлива, полученные по уравнениям регрессии в режиме опускания груза при значениях mгр от 250 до 24000 кг (пример)
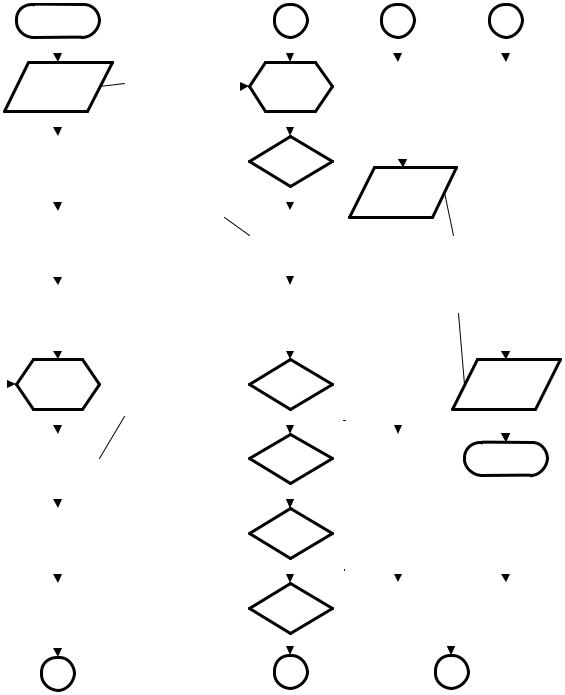
Предложена методика оптимизации технологических параметров рабочего процесса СГК. Для решения обратной задачи кинематики СГК разработан алгоритм, блок-схема которого представлена на рисунке 7. Особенность алгоритма заключается в определении граничных значений
интервалов ([q8В; q8H], ([q9В; q9H], ([q10В; q10H]) управляемых координат и выборе решения из допустимых конфигураций механической подсистемы
по значению одной из управляемых координат, заданному внутри соответствующего интервала с последующим определением значений двух оставшихся.
13
|
|
|
|
|
|
|
|
|
|
|
Начало |
|
|
Координаты точки |
|||
|
|
|
|
подвеса груза xгр, |
||||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
yгр, zгр, |
|
|
|
|
|
|||||
|
|
|
|
|
|
координаты шасси |
||
|
|
Ввод |
||||||
|
|
|
|
|
q1…q6, |
|||
|
|
исходных |
|
|
|
постоянных |
||
|
|
данных |
|
|
конструктивных |
|||
|
|
|
|
параметров крана |
||||
|
|
|
|
|
|
|||
|
|
|
|
|
|
x1,2, y1,2, x3,33, y4,43, |
||
|
|
|
|
|||||
|
|
|
|
|
|
q8max, q8min, q9max, |
||
|
|
Определение |
|
|||||
|
|
|
|
|
q9min, q10min. |
|||
|
|
ρ |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В зависимости от |
||
|
|
|
|
|
|
текущего номера |
||
|
|
|
|
|||||
|
|
Определение |
|
|
|
итерации |
||
|
|
|
|
используются разные |
||||
|
|
q6,7 |
|
|
|
уравнения. |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Определение |
|
|
|
|
|
|
|
|
q7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i=1, 4, |
|
|
|
|
|
|
|
|
шаг 1 |
|
|
В зависимости от |
|||
|
|
|
|
|
|
текущего номера |
||
|
|
|
|
|
|
|
итерации |
|
|
|
|
|
|
|
|
используются |
|
|
|
|
|
|||||
|
|
Определение |
|
|
разные уравнения. |
|||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
||
|
|
q8 иq9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Определение |
|
|
|
|
|
|
|
|
q8,1, q8,1, R2,5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Определение |
|
|
|
|
|
|
|
|
ρi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
|
|
|
|
3 |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i=1, 3, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
Определение |
|
|
|
|
|
Определение |
|
|||||||||
|
|
|
|
|
шаг 1 |
|
|
|
|
|
q9 и q8 |
|
|
|
|
|
|
q10 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Нет |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
ρi≤ρ<ρi+1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
Вывод |
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сообщения |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
Да |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
об ошибке |
|
|
|
|
|
|
||||||||
|
|
|
|
Определение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Сообщениео |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
[q8В q8Н]; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
невозможности |
||||||
|
|
|
|
|
|
Да |
|
|
|
|
|
|
|
|
|
обеспечить заданные |
||||||||||
|
|
|
|
|
[q9В q9Н] |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
координаты груза |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
Определение |
|
|
|
|
|
Вывод значений: |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
q8В, q8Н, q9В, q9Н, |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
[q10В q10Н] |
|
|
|
|
|
q10В, q10Н, q7, q8, q9, |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q10. |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q10В<q10min |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вывод |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
результатов |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Нет |
|
|
|
|
|
|
Да |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(q10≥q10min)˄ |
|
|
|
|
|
Коррекция |
|
|
|
|
|
|
Конец |
||||||||
|
|
|
|
|
(q10Н<q10min) |
|
|
|
|
|
q10Н, q9Н, q8Н |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Нет |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
Задаетсяq8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Да |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
Нет |
|
|
|
|
|
|
Да |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
Задаетсяq9 |
|
|
|
|
|
Определение |
|
|
|
Определение |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
q8 |
|
|
|
|
|
|
q9 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
Нет |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
3 |
Рисунок 7 – Блок-схема алгоритма определения значений управляемых координат стрелового грузоподъемного крана
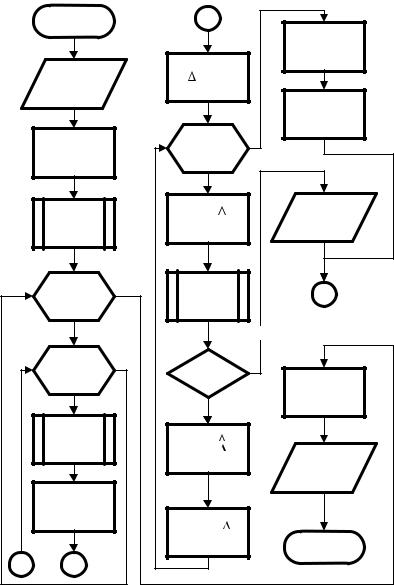
Блок-схема алгоритма определения оптимальных значений управляемых координат СГК для заданного перемещения груза приведена на рисунке 8. Данный алгоритм позволяет в автоматизированном режиме определять оптимальные значения управляемых координат СГК в
начальной (q7нач, q8нач, q9нач, q10нач), конечной (q7кон, q8кон, q9кон, q10кон) и в
промежуточных точках на всей траектории перемещения груза, используя критерий оценки энергетической эффективности. В качестве примера на рисунке 9 приведена зависимость критерия энергетической эффективности Ae от управляемых координат в начальной и конечной точках траектории.
14
|
Начало |
|
Ввод |
|
исходных |
|
данных |
|
R1нач=A1-1·R0нач; |
|
R1кон=A1-1·R0кон |
|
Вычисление: |
|
q7 1; q8Н1; |
|
q8В1; q7 2; |
|
q8Н2; q8В2 |
|
q8 нач= |
|
=q8Ннач...q8Внач |
|
q8 кон= |
|
=q8Нкон...q8Вкон |
|
Вычисление: |
|
q9 нач; q10 нач; |
|
q9 кон; q10 кон |
|
Счетчик: |
|
m=m+1 |
2 |
1 |
|
1 |
|
qначm=[q7начq8нач |
|
|
|
|
|
|
|
q9начq10нач]; |
Вычисление |
qконm=[q7конq8кон |
||
q9конq10кон]; |
|||
n; |
qi; Ai=0, |
|
|
где i=7...10 |
Aem=A7+A8+ |
||
|
|
|
|
|
|
|
+A9+A10+AT |
|
j=0...n |
|
|
|
шаг 1 |
|
|
qi=qi+j· qi, |
Перемещение |
||
конструктивно |
|||
где i=7...10 |
недопустимо |
||
Вычисление |
2 |
||
|
mmax |
|
|
|
|
|
Да |
mгр > mmax |
|
||
Нет |
|
Aemin=min{Aem} |
|
|
|
||
Gi=Gi п при |
qi>0; |
|
|
Gi=Gi о при |
qi>0, |
Ввод |
|
где i=7...10 |
|||
|
|
|
результатов: |
|
|
|
Aemin; qнач; qкон |
Ai=Ai+Gi·| qi|, |
|
||
гдеi=7...10 |
Конец |
||
|
|
|
|
Рисунок 8 – Блок-схема алгоритма определения оптимальных значений управляемых координат стрелового грузоподъемного крана для заданной траектории перемещения груза
Эффективность СГК во многом определяется местом его установки на рабочей площадке. В связи с этим в работе был разработан алгоритм определения оптимальных значений координат базового шасси СГК относительно начального и конечного положений груза, с учетом запретных для расположения зон. Алгоритм заключается в оптимизации обобщенных координат базового шасси (q1, q3). В интервалах заданной области ([xш0min;
xш0max]; [zш0min; zш0max]) положений начала системы координат, связанной с базовым шасси. С помощью двух вложенных циклов для каждого сочетания
координат вычисляется значение целевой функции Aexш0,zш0 и выполняется проверка на принадлежность точки O1 с координатами xш0, zш0 запретным зонам методом трассировки луча (рисунок 10). В качестве примера на рисунке 11 приведена зависимость критерия энергетической эффективности Ae от координат базового шасси q1, q3.
15