Материал: 1070
|
|
7 |
3 |
Механическая подсистема |
35 |
Базовое шасси |
Грунт |
|
|
8 |
|
|||
|
|
|
|
4
Поворотнаяплатформа  36
36 29 30
29 30
Механи- |
|
ческая |
|
передача |
|
21 |
22 |
|
|
|
|
|
|
Стрела |
|
|
|
Телескопи- |
|
37 |
|
||||
|
|
|
|
ческое звено |
|
|
|
|
|
||
31 32
|
|
Механи- |
|
23 |
24 |
ческая |
|
|
|
передача |
|
|
|
25 |
26 |
38 |
Груз |
|
|
33 |
34 |
Механи- |
|
ческая |
|
передача |
|
27 |
28 |
Гидро- |
|
|
|
Гидро- |
|
Гидро- |
|
|
Гидро- |
|
|||||||
мотор1 |
|
|
|
цилиндр1 |
|
цилиндр2 |
|
мотор2 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
14 |
|
15 |
16 |
|
17 |
18 |
|
19 |
20 |
|
|
|||||
|
13 |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Гидравлические распределители |
|
|
|
2 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11 |
12 |
|
|
|
|
|
Насос |
10 |
Механи- |
6 |
ДВС |
1 |
|
9 |
ческая |
5 |
||||
|
||||||
|
|
передача |
|
|
|
|
Подсистема гидропривод |
|
Подсистема ДВС |
|
|||
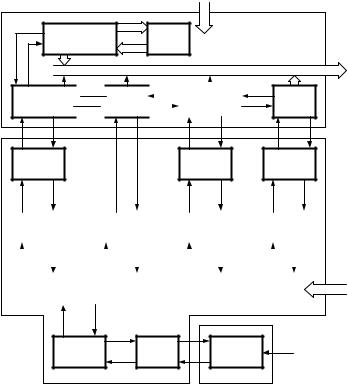
Рисунок 1 – Блок-схема сложной динамической системы стрелового грузоподъемного крана
Блоки соединены между собой связями, отражающими влияние одних блоков на другие. Объемные стрелки обозначают многопараметрические связи. Рассмотрение СГК как сложной динамической системы позволило выделить основные этапы автоматизированного построения модели. Теоретические исследования выполнены методами математического и имитационного моделирования. При построении регрессионной модели энергетических затрат использовались методы регрессионного анализа. При разработке методики
оптимизации технологических параметров рабочего процесса СГК применена теория алгоритмов.
Математическое описание механической подсистемы СГК основывалось на следующих допущениях: СГК представляет собой шарнирно-сочлененный пространственный многозвенник, с наложенными на него упруго-вязкими связями; элементы металлоконструкций представляются абсолютно жесткими; инерционные свойства элементов металлоконструкций характеризуются массами, координатами центров масс, осевыми моментами инерции, центробежными моментами инерции; люфты в шарнирах отсутствуют; связи, наложенные на динамическую систему СГК, являются голономными и стационарными; внешние силы, действующие на звенья механической подсистемы СГК, являются сосредоточенными.
При моделировании гидропривода СГК были приняты следующие допущения: влияние волновых процессов на динамику гидропривода не учитывается; инерционные свойства жидкости в элементах гидропривода не учитываются; плотность, кинематическая вязкость, модуль упругости жидкости и коэффициент расхода элементов гидропривода принимают постоянные значения на протяжении моделирования; переход между ламинарным и турбулентными режимами происходит мгновенно; силы инерции и трения в элементах конструкции гидравлических устройств не учитываются.
6
Обоснована методика экспериментальных исследований, предусматривающая проведение пассивного натурного эксперимента и активного вычислительного эксперимента на имитационной модели СГК. В соответствии с целью и задачами работы и принятой методикой исследований определена структура работы.
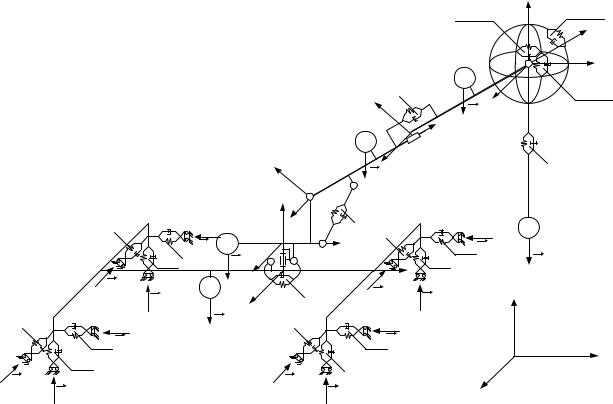
В третьей главе представлены математические модели подсистем сложной динамической системы СГК. На рисунке 2 изображена обобщенная расчетная схема механической подсистемы СГК, представляющая собой систему с пятью массами, звеньями которой являются: базовое шасси массой m1, включающее в себя массу ходовой рамы; поворотная платформа массой m2, включающая в себя массы кабины, противовеса и лебедки; стрела массой m3; телескопическое звено массой m4; груз массой m5, включающий в себя массу крюковой обоймы, траверсы. Расчетная схема СГК рассматривается в правой инерциальной системе координат O0X0Y0Z0.
|
|
|
|
|
|
|
|
|
c13,b13 |
Y5 |
|
c14,b14 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
X4 |
|
|
|
|
|
|
|
|
|
m4 |
|
O5 |
X5 |
|
|
|
|
|
|
|
|
c19,b19 |
|
c15,b15 |
||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
Z5 |
|
||
|
|
|
|
|
|
|
|
Y4 |
Fm4 |
|
|
|
|
|
|
|
|
|
|
|
m3 |
X3 |
|
|
|
|
|
|
|
|
|
|
|
Z4 |
O4 |
|
c16,b16 |
|
|
|
|
|
Y3 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
Fm3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y , Y |
Z3 |
O3 |
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|
c18,b18 |
|
|
|
|
|
|
c10,b10 |
|
|
|
|
|
|
|
m5 |
|
||
|
|
R6 m2 |
|
O2 |
|
|
X2 c11,b11 |
|
|
|||
|
|
c6,bF6 |
|
|
|
c7,b7 FR7 |
|
|
||||
|
|
|
|
O1 |
|
|
Fm5 |
|
||||
|
c2,b2 |
|
Fm2Z2 |
|
|
X1 |
c3,b3 |
|
|
|||
|
FR10 |
m1 |
|
|
|
|
|
|
|
|
||
|
|
|
c17,b17 |
FR11 |
FR3 |
|
|
|
||||
|
FR2 |
|
|
Z1 |
|
Y0 |
|
|
||||
|
|
Fm1 |
|
|
|
|
|
|
||||
c9,b9 |
|
|
c12,b12 |
|
|
|
|
|
|
|
||
|
c5,b5 FR5 |
|
|
|
|
|
|
c8,b8FR8 |
|
|
|
|
FR9 |
c1,b1 |
|
|
|
FR12 |
|
c4,b4 |
|
O0 |
|
X0 |
|
FR1 |
|
|
|
FR4 |
|
Z0 |
|
|
||||
|
|
|
|
|
|
|
|
|
||||
Рисунок 2 – Обобщенная расчетная схема стрелового грузоподъемного крана
7
8
|
|
Поворотная платформа |
|
1 |
B |
CS2 |
2 |
|
F |
||
Port1 |
CS1 |
Port2 |
|
|
|
CS3 |
|
|
Revolute |
Body |
3 |
|
|
(Поворотная платформа ) |
Port3 |
|
|
q7 |
|
|
|
1 |
|
|
|
To Workspace |
|
|
|
In1 |
|
|
|
|
|
|
|
-K- |
1 |
|
|
Out1 |
|
|
|
|
|
m |
|
Gain |
|
Joint Sensor |
-K- |
|
|
|
|
|
|
|
Gain1 |
|
Joint Actuator |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Стрела |
||
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Port2 |
|
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CS1 |
CS2 |
|
|
|
|
|
|
3 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CS3 |
|
|
|
|
|
|
Port3 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
Revolute |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Body |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
To |
|
q8 |
|
(Основание |
стрелы ) |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Workspace1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
Joint Sensor |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
1 |
|
|
B |
F |
|
|
|
|
|
CS1 |
CS2 |
|
|
|
B |
|
F |
|
|
|
|
CS1 |
CS2 |
|
|
|
|
|
F |
B |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
Port1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Body |
|
|
|
|
|
|
|
|
|
|
|
|
Body |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
Revolute1 |
|
|
|
|
|
|
|
Revolute2 |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
(Корпус |
ГЦ) |
|
|
|
|
|
|
|
|
|
|
|
(Шток ГЦ) |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
Prismatic |
|
1 |
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
In1 |
||
IC |
|
-K- |
1 |
|
|
Out1 |
|
|
|
|
|
m |
|
Gain |
|
Joint Sensor1 |
-K- |
|
|
|
|
|
|
|
Gain1 |
|
Joint Actuator |
|
|
|
1 |
B |
Телескопическое звено |
|
|
|
||
Port1 |
F |
CS1 CS2 |
2 |
|
|
|
Port2 |
|
Prismatic1 |
Body |
|
|
|
(Телескопическое |
звено) |
|
|
q9 |
1 |
|
|
To Workspace |
In1 |
|
|
-K- |
1 |
|
|
Out1 |
|
|
|
|
|
m |
|
Gain |
Joint Sensor |
-K- |
|
|
|
|
|
Gain1 |
Joint Actuator |
|
|
|
|
|
|
|
|
|
|
|
Базовое шасси |
|
|
|
|
|
|
|
Port1 |
|
|
|
|
|
|
|
|
|
|
CS1 |
Port1 |
F |
|
|
|
|
|
|
|
|
|
|
Env |
|
B |
y |
|
||
|
|
Базовое шасси |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
Subsystem Force1 |
|
|||||||
|
|
|
1 |
|
Machine |
|
F |
CG |
|
||||||
|
|
|
|
|
|
|
|
Ground |
|
|
|
||||
|
In1 |
|
|
|
|
|
Angle |
|
Environment |
|
|
|
F |
|
|
|
Port1 |
|
|
|
|
|
|
|
|
|
|
CS2 |
Port1 |
|
|
|
|
|
|
|
Out1 |
1 |
|
|
|
|
y |
|
|||
|
Port2 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
Bushing |
|
Subsystem Force2 |
|
||||
|
|
|
|
|
|
Torque |
|
|
|
|
FRi |
||||
|
Port3 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Поворотная |
платформа |
2 |
|
|
|
|
CS3 |
Port1 |
F |
Scope |
||||
|
|
|
|
|
|
|
|
Joint Sensor |
|
y |
|
||||
|
In1 |
|
|
|
|
|
Position |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
Subsystem Force3 |
|
|||
|
Port1 |
|
|
|
|
Out1 |
2 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
1 |
CS5 |
|
|
|
|||
|
Port2 |
|
|
|
|
|
|
Joint Sensor1 |
|
|
|
||||
|
|
|
|
|
|
Force |
|
|
Port1 |
|
|
F |
|
||
|
Port3 |
|
|
|
|
|
|
|
|
CS4 |
Port1 |
|
|||
|
Стрела |
|
|
|
|
|
|
|
y |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
3 |
|
Joint Sensor2 |
|
|
Subsystem Force4 |
|
|||||
|
|
|
|
|
|
|
|
q1..q6 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
In1 |
|
|
|
|
|
Position1 |
|
|
|
Body |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Port1 |
|
|
|
|
Out1 |
3 |
|
|
Joint Sensor3 |
Scope1 (Базовое шасси ) |
|
|
||
|
Port2 |
|
|
|
|
|
Force1 |
|
|
|
q1_6 |
|
|
|
Scope4 |
|
|
|
|
|
|
|
|
Joint Sensor4 |
|
|
|
|
|||
|
Телескопическое звено |
|
|
|
|
|
|
|
|||||||
|
4 |
|
|
|
To Workspace |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
In1 |
|
|
|
|
|
Position2 |
|
|
Joint Sensor5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Port |
|
|
|
|
Out1 |
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Force2 |
|
Joint Initial |
|
|
|
|
|
|
|
|
|
|
Груз |
|
|
|
|
Condition |
|
|
|
|
|
|
|
1 |
B |
|
|
|
|
|
|
Груз |
|
|
|
Определение сил реакции на опорныйэлемент |
|||
|
|
|
|
|
|
|
|
|
|
x_0 |
|
|
|
||
Port |
F |
CS1 |
CG |
|
|
|
|
|
|
|
|
Constant3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
-K- |
|
1 |
|
|
|
Body ( Груз) |
|
Body Sensor |
X,Y,Z |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||||||
|
Bearing |
|
|
|
|
|
|
|
Gain6 |
|
F |
||||
|
|
|
q10 |
|
1 |
|
|
|
2 |
y_0 |
|
||||
Joint Initial |
|
To Workspace4 |
|
In1 |
|
|
|
y |
Constant1 |
-K- |
|
|
|||
|
|
|
|
|
|
|
|
|
y |
|
|
||||
|
|
|
|
|
1 |
|
|
|
|
|
|
||||
Condition |
|
|
-K- |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
Out1 |
|
|
|
|
z_0 |
Gain2 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
Body Actuator2 |
||||
|
|
m |
|
Gain3 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
Constant4 |
|
|
|
|||
|
|
-K- |
|
|
|
|
|
|
|
|
z |
-K- |
|
|
|
|
Joint Sensor |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
Gain7 |
|
|
||
|
|
Gain5 |
|
|
Joint Actuator |
|
|
|
m |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
1 |
Body Sensor1 |
|
|
-K- |
|
|
|
|
|
|
|
|
|
|
|
Port1 |
x' |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Mechanical |
|
q11 |
|
|
|
|
|
|
Mechanical |
|
|
|
Gain4 |
|
|
|
|
|
|
|
|
|
Branching |
|
|
|
|
|
|
||
Branching |
To Workspace |
|
|
|
|
|
|
|
|
|
|
||||
-K- |
|
|
|
Bar1 |
|
|
|
-K- |
|
|
|||||
Bar3 |
|
|
|
|
|
|
|
|
y' |
|
|
|
|||
Joint SensorR1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
Gain |
|
Joint Actuator R1 |
|
|
|
Gain1 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
q13 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
To Workspace1 |
-K- |
|
|
|
|
|
z' |
|
-K- |
|
|
|||
|
Joint SensorR2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
Gain2 |
|
Joint Actuator R2 |
|
|
|
|
Gain3 |
|
|
||
|
|
|
|
|
-K- |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
q12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Gain1 |
|
|
|
|
|
|
|
|
||
|
To Workspace2 |
|
|
|
|
|
|
|
|
|
|||||
|
Joint SensorR3 |
0 |
|
|
|
-K- |
Joint Actuator R3 |
|
|
|
|
|
|
|
|
|
Mechanical |
Constant1 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
Mechanical |
|
|
|
|
|
|
|
|||
|
Branching |
|
|
Gain4 |
|
|
|
|
|
|
|
||||
|
Bar1 |
|
|
|
|
Branching |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Bar2 |
|
|
|
|
|
|
|
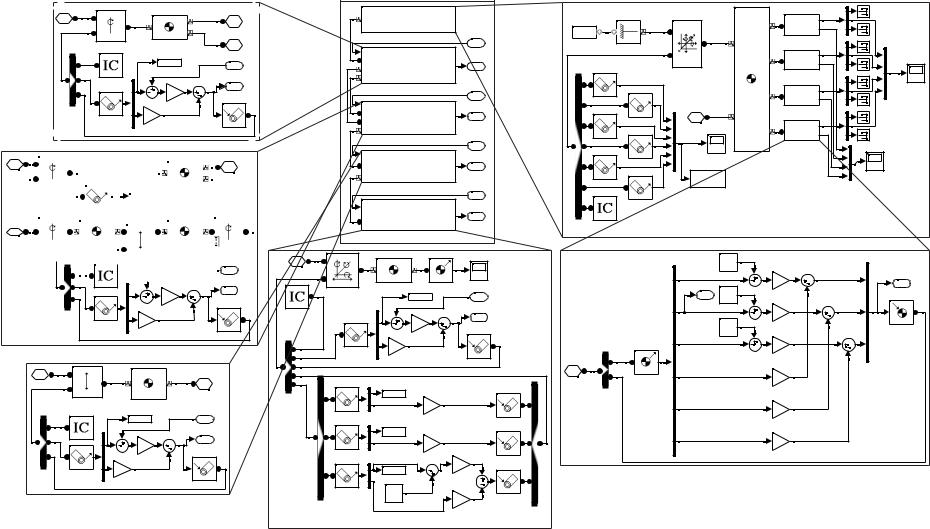
Рисунок 3 – Структурная схема механической подсистемы стрелового грузоподъемного крана в Simulink (пунктирными линиями обозначены блоки звеньев)
Каждому звену поставлена соответствующая локальная система координат. Массы звеньев в поле тяготения формируют силы веса, представленные на расчетной схеме векторами Fm1… Fm5. Со стороны грунта на опорные элементы действуют силы реакции, представленные на расчетной схеме векторами FR1… FR12. Упруго-вязкие свойства связей, наложенных на звенья системы, представлены на расчетной схеме упруговязкими телами Фохта, характеризуемыми коэффициентами жесткости c1…c19 и коэффициентами вязкости b1…b19. Для расчетной схемы СГК приняты 13 обобщенных координат q1…q13 (таблица 1). Структурная схема механической подсистемы СГК в Simulink представлена на рисунке 3.
Таблица 1 – Обобщенные координаты q1…q13
№ |
Характеристика координаты в локальной СК |
Обозначение |
|
|
|
|
|
1 |
Перемещение центра масс базового шасси вдоль оси X0 |
q1 |
|
2 |
Перемещение центра масс базового шасси вдоль оси Y0 |
q2 |
|
3 |
Перемещение центра масс базового шасси вдоль оси Z0 |
q3 |
|
4 |
Поворот базового шасси вокруг оси X1 |
q4 |
|
5 |
Поворот базового шасси вокруг оси Y1 |
q5 |
|
6 |
Поворот базового шасси вокруг оси Z1 |
q6 |
|
7 |
Поворот платформы вокруг оси Y2 |
q7 |
|
8 |
Поворот стрелы вокруг оси Z3 |
q8 |
|
9 |
Выдвижение телескопического звена вдоль оси X4 |
q9 |
|
10 |
Перемещение центра масс груза вдоль оси Y5 |
q10 |
|
11 |
Поворот системы координат O5X5Y5Z5 |
вокруг оси X5 |
q11 |
12 |
Поворот системы координат O5X5Y5Z5 |
вокруг оси Y5 |
q12 |
13 |
Поворот системы координат O5X5Y5Z5 |
вокруг оси Z5 |
q13 |
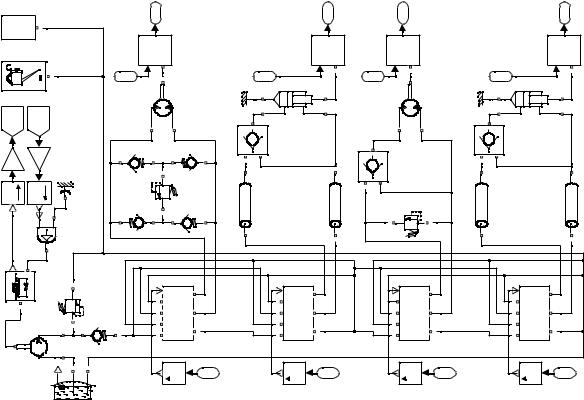
Гидропривод является важной подсистемой сложной динамической системы СГК. Подсистема гидропривод рассматривается как совокупность соединенных между собой элементов: трубопровод; гидравлический мотор; гидравлический насос; местное сопротивление (дроссель); гидроцилиндр; клапаны (предохранительный, обратный). Для каждого из элементов, входящих в гидропривод, составлена своя математическая модель, представляющая собой дифференциальные уравнения. Уравнения, описывающие гидравлические элементы, реализуются в среде Simulink при помощи блоков из библиотек SimHydraulics, Simscape. Структурная схема подсистемы гидропривод СГК, включающая в себя модели гидроэлементов, представлена на рисунке 4.
9
|
|
|
|
|
Angle |
1 |
|
|
|
|
Position1 |
|
2 |
|
3 |
Position2 |
|
Position |
4 |
||||
f(x)=0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Out1 |
Механическая |
|
Механическая |
|
|
Out2 |
|
Out2 |
|
Механическая |
|
|
|
Out2 |
||
|
|
|
|
|
|
|
передача 1 |
|
передача |
2 |
|
|
|
передача 3 |
|
|
|
||||||
|
|
|
|
|
|
In1 |
|
|
In2 |
B1 |
|
In2 |
B |
|
|
In2 |
B1 |
||||||
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
5 |
|
|
|
|
|
|
6 |
|
|
|
|
7 |
|
|
8 |
Ц3 |
|
|
|
|
|
|
|
Torque |
|
|
S |
|
|
Force1 |
|
|
|
Force2 |
S |
|
Force |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
М1 |
|
|
C |
|
R |
|
|
|
|
М2 |
C |
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
B |
|
|
|
|
A |
|
B |
|
||
Mc |
w |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
A |
B |
|
|
|
|
|
|
|
|
A |
B |
|
|
|
|
||||
|
|
|
|
|
|
|
|
B |
Ц1 |
|
|
|
|
B |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
КОУ1 |
|
|
|
|
|
|
|
КОУ3 |
|
|
|
|
-K- |
|
|
|
|
|
|
|
|
A |
|
X |
|
|
|
|
B |
|
A |
X |
|
|
|
-K- |
|
|
|
A |
B |
|
B |
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
КОУ2 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
КО3 |
|
|
A |
КО4 |
B |
|
|
|
|
B |
A |
X |
|
B |
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
S |
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
КП2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
PS |
PS |
|
|
|
|
|
|
|
|
|
|
|
|
|
КП3 |
|
|
|
|
|
|||
|
|
|
КО2 |
|
|
B |
КО5 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
S |
C |
|
|
B |
A |
|
A |
B |
A |
|
|
|
|
A |
|
B |
A |
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|||
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
B |
|
|
|
|
S |
A |
|
|
S |
A |
|
|
|
S |
|
A |
|
S |
A |
|
|
|
|
|
|
|
T1 |
|
|
T1 |
|
|
|
T1 |
|
T1 |
|
|||||||
|
|
|
|
КП1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
P1 |
B |
|
|
P1 |
B |
|
|
|
P1 |
B |
|
P1 |
B |
|
||
|
Н |
|
A |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
T2 |
|
|
|
T2 |
|
|
|
|
T2 |
|
|
T2 |
|
|
||
|
|
|
|
|
|
|
|
T |
|
|
T |
|
|
|
T |
|
T |
|
|||||
|
|
P |
|
A |
B |
|
|
P |
|
|
P |
|
|
|
P |
|
|
P |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
S |
|
|
|
КО1 |
|
|
|
II |
|
|
|
III |
|
|
|
|
|
V |
|
|
VI |
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
P |
R |
|
|
|
PS S |
1 |
|
PS S |
|
|
2 |
|
PS S |
3 |
|
PS S |
|
4 |
||
|
|
|
|
|
|
|
In1 |
|
|
|
In2 |
|
|
|
In3 |
|
|
In4 |
|||||
|
|
|
|
Б |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 4 – Структурная схема подсистемы гидропривод стрелового |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
грузоподъемного крана в Simulink |
|
|
|
|
|
||||||||||
Двигатель внутреннего сгорания, оснащенный всережимным регулятором угловой скорости, описан известной системой уравнений:
|
J |
d |
д |
= M д ( д |
, z) M c ; |
|
|
|
|
||||
dt |
|
|
||||
|
|
|
|
|
|
|
M д ( д, z) = M д ( д ) M z kдz; |
|
|||||
|
|
|||||
|
dz = (a bz) д2 iр2 cпрz F; |
(1) |
||||
|
||||||
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
0 z zmax , |
|
|
|||
|
|
|
||||
где J – приведенный к валу ДВС момент инерции вращающихся частей; ωд
– угловая скорость коленчатого вала; Mд – крутящий момент на валу; Mс – момент сил сопротивления; M’д(ωд) – характеристика ДВС, аппроксимируемая конечным набором точек; z – перемещение муфты регулятора; kд, a, b – постоянные настройки регулятора; cпр и F – жесткость и сила предварительного сжатия пружины; ν – коэффициент вязкого трения в регуляторе.
Часовой расход топлива (единица измерения: литр/час), определялся по формуле:
GTЛ = |
|
Nд ge |
, |
(2) |
|
|
|||
|
1000 T |
|
||
10 |
|
|
|
|