Материал: zapiska_1
Рисунок 7.8 – Структурная схема системы питания
Элементы системы питания в структурной схеме:
Далее составляем логическую модель.
Логическая модель получается на основе структурной схемы. При этом
необходимо соблюдать следующие формальные правила:
− блоки Рi заменяются на Qi;
− если блок Рi имеет несколько выходов, то он заменяется таким же количеством блоков, каждый из которых имеет один выход и существенные для него входы;
− выходы и входы i-х блоков представляются как Хi.
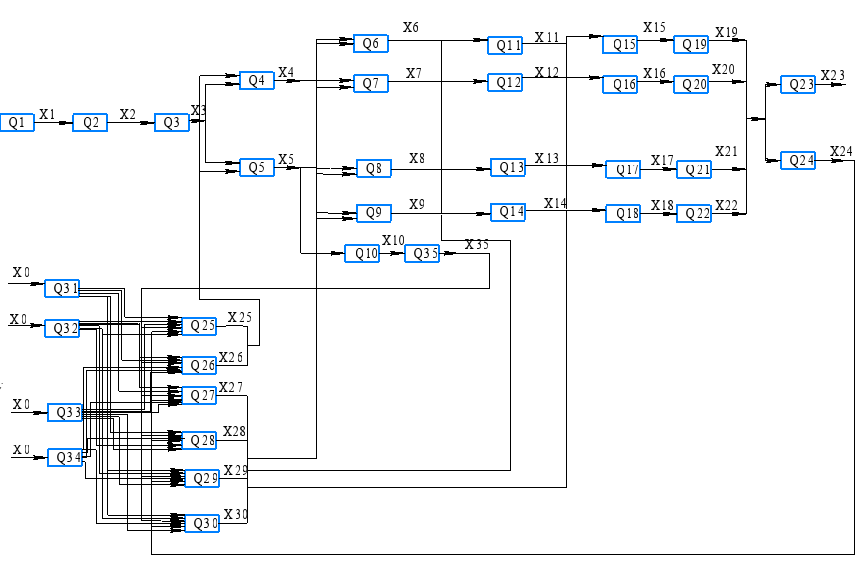
Q1 - топливный бак, Q2 - топливоподкачивающий насос, Q3 - топливный фильтр, Q4...Q5 - топливный насос высокого давления, Q6…Q10 -топливные рампа, Q11…Q14-свечи накала, Q15…Q18-форсунки, Q19…Q22- цилиндры, Q23...Q24 - датчик содержания кислорода в ОГ, Q25...Q30 -электронный блок управления, Q31 - датчик температуры охлаждающей жидкости, Q32 - датчик вращения коленчатого вала, Q33 - датчик положения педали, Q34 - датчик вращения распределительного вала, Q35 - датчики давления в топливной системе.
Рисунок 7.9 – Логическая модель системы питания
После построения логической модели объекта контроля необходимо для каждого ее блока записать уравнения типа:
Хi = QiFi, (7.3)
где Qi– оператор i-го логического объекта (принимаем значение «0», если блок неработоспособен и «1», если блок работоспособен);
Fi – функция условий работы i-го блока (тоже принимаем значение «0» или «1»).
X1=Q1; X2=Q2X1; X3=Q3X2; X4=Q4X3X22; X5=Q5 X3X23; X6=Q6X4;
X7=Q7X4X24; X8=Q8X4X25; X9=Q9X5X26; X10=Q10X5X27; X11=Q11X5;
X12=Q12X7;X13=Q13X8X31;X14=Q14X9;X15=Q15X10; X16=Q16X12;
X17=Q17X13; X18=Q18X14; X19=Q19X15; X20=Q20X16X17X18X19;
X21= Q21X16X17X18X19; X22=Q22X21X28X29X30 X31X32X33;
X23=Q23 X21X28X29X30 X31X32X33; X24=Q24 X21X28X29X30 X31X32X33;
X25=Q25 X21X28X29X30 X31X32X33; X26=Q26 X21X28X29X30 X31X32X33;
X27=Q27 X21X28X29X30 X31X32X33; X28=Q28X0; X29=Q29X0; X30=Q30X0; X31=Q31 X0; X32=Q32 X0; X33=Q33 X0; X34=Q34 X0; X35=Q35 X0;
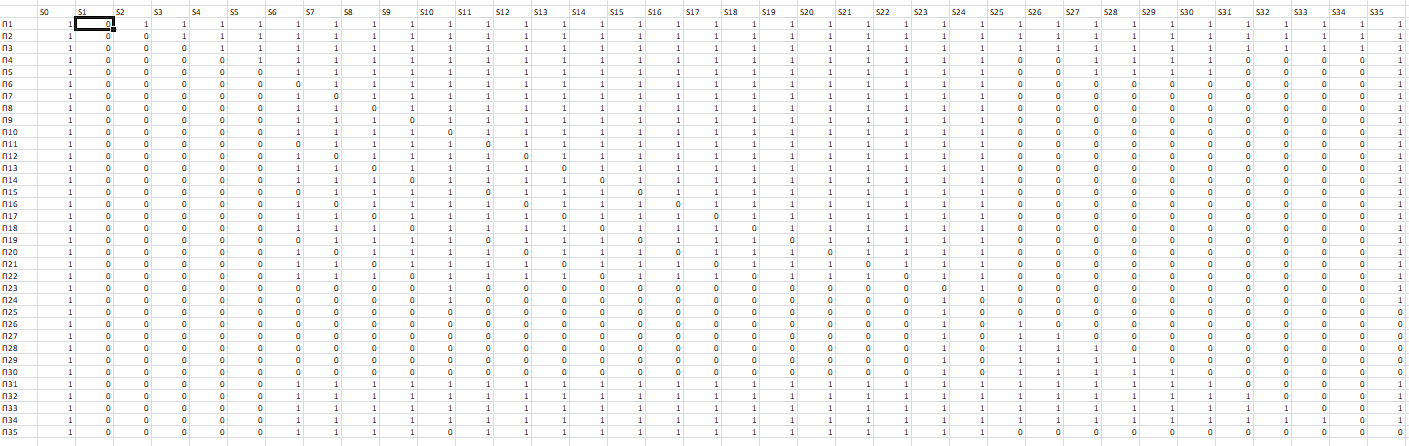
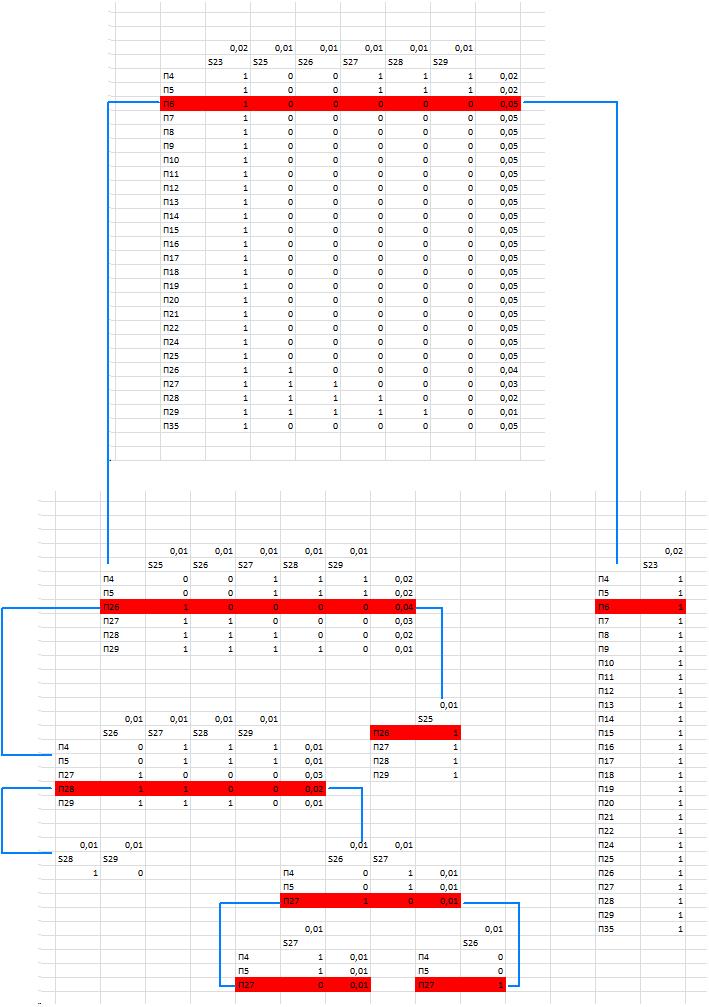
Таблица состояний заполняется на основе уравнений. Их число должно равняться количеству блоков логической модели. Число строк принимается равным числу выходов блоков модели. Число столбцов принимается равным числу блоков логической модели плюс один, учитывающий исправное состояние.
Таблица 7.1 - Таблица состояний
7.4 Разработка алгоритмов оценки вида технического состояния и поиска места отказа
Для разработки алгоритма оценки вида технического состояния объекта контроля (работоспособное или неработоспособное) необходимо определить минимальную проверяющую совокупность точек контроля. Она равна наименьшему числу строк таблицы состояний, содержащих нулевые значения выходов для всех возможных состояний S1, S2, …, Sn. Для нашего случая это проверки П5….П33 Теперь, возвращаясь через логическую и структурную модели к функциональной схеме, определяем, что необходимо проверять тормоза, датчики скорости и блок управления.
При проверке П6 и П11 объектом контроля является датчик давления топлива;
При проверке П20…П21 объектом контроля является датчик содержания кислорода в ОР;
При проверке П22…П27 объектом контроля является ЭБУ.
И тогда, после проведения проверок, если хотя бы одна из них даст значение «0» (диагностический параметр будет иметь «плохое» значение), то система имеет неисправность. Если все проверки дадут значение «1», то это может быть лишь в случае S0, когда система работоспособна.
Вероятности состояний S1, S2,…, Sn наиболее ответственных элементов, таких как тормозной кран, компрессор, регулятор давления, тормозные камеры, главный и рабочие тормозные цилиндры принимаются из диапазона 0,1−0,25. Вероятности остальных состояний принимаются одинаковыми и рассчитываются по формуле:
 , (7.4)
, (7.4)
где
 – сумма вероятностей отказов основных
элементов;
– сумма вероятностей отказов основных
элементов;
 – количество
оставшихся состояний (отказов).
– количество
оставшихся состояний (отказов).
Сумма вероятностей всех состояний S1, S2, …, Sn должна равняться 1.
На основании полученных вероятностей и таблицы состояний строим дерево поиска отказов.
Рисунок 7.10 - Дерево поиска отказов
Продолжение рисунка 7.10
Продолжение рисунка 7.10
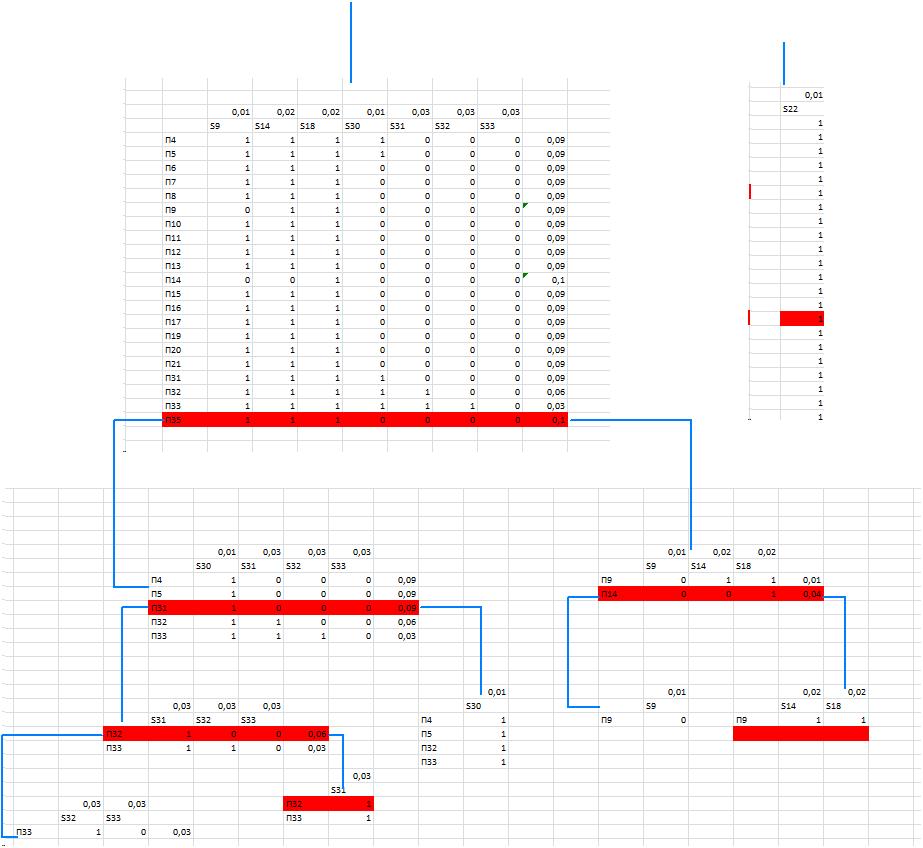
Продолжение рисунка 7.10
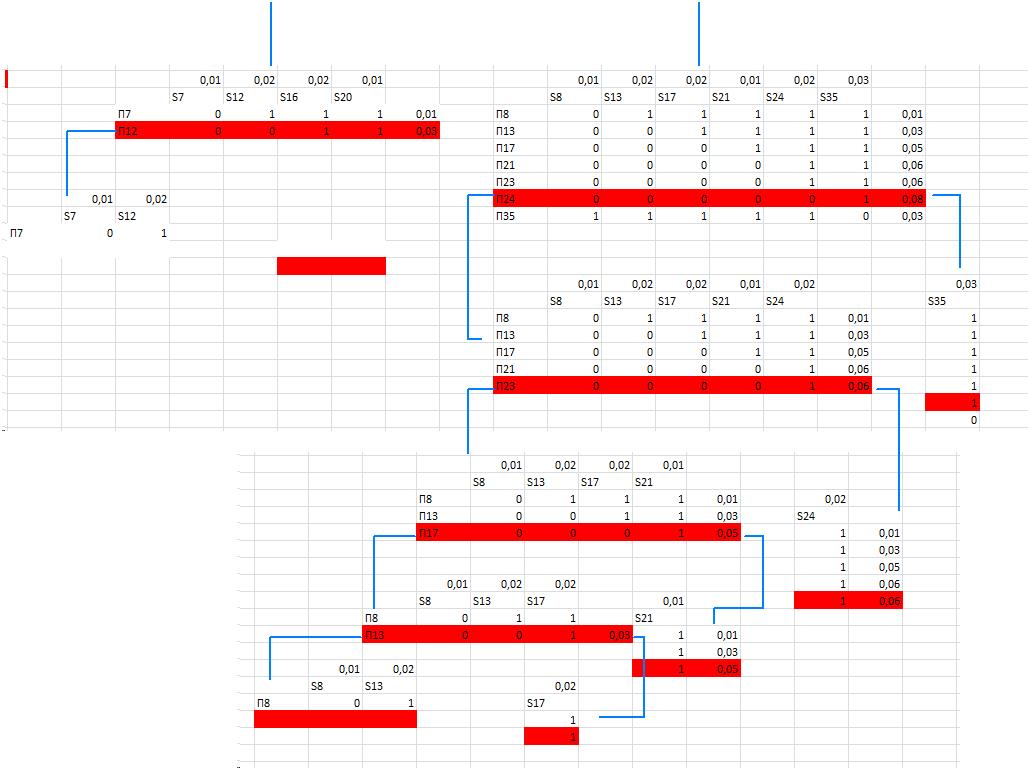
Окончание рисунка 7.10
На основе дерева поиска отказа строится алгоритм поиска отказа. Для системы питания он представлен на рисунке 7.11
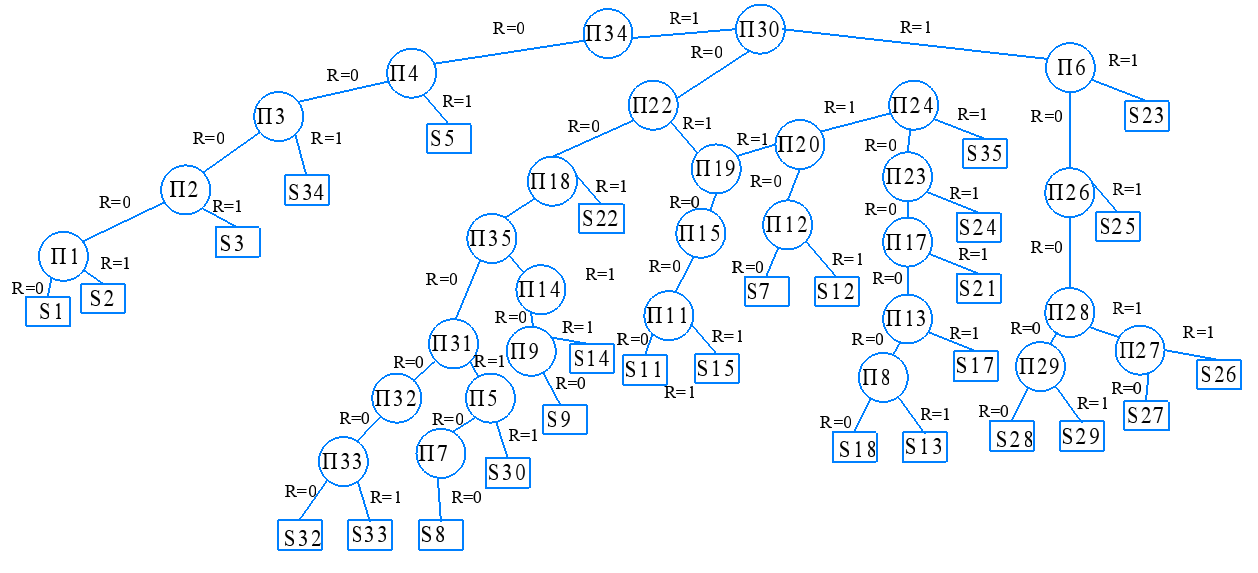
Рисунок 7.11 - Алгоритм поиск
8 Анализ влияния различных факторов на коэффициент технической готовности автомобиля
Одним из основных комплексных показателей обеспечения работоспособного состояния транспортных средств является техническая готовность. Она определяется долей календарного времени, в течение которого автомобиль (автомобили) находятся в технически исправном состоянии и могут выполнять транспортную работу. Чем она больше, тем на более высоком уровне осуществляются все процессы ТО и ремонта на данном предприятии. Техническая готовность однозначно оценивается коэффициентом технической готовности.
Коэффициент технической готовности автомобиля рассчитывается по формуле:
 (8.1)
(8.1)
где
 – количество дней эксплуатации за цикл;
– количество дней эксплуатации за цикл;
 – количество
дней простоя автомобиля в ремонтах и
ТО за цикл.
– количество
дней простоя автомобиля в ремонтах и
ТО за цикл.
Количество дней эксплуатации за цикл равно:
 (8.2)
(8.2)
Количество дней простоя автомобиля в ремонте и ТО за цикл определяется по формуле:
 (8.3)
(8.3)
где  – простой автомобилей в капитальном
(восстановительном) ремонте, дни. Для
легковых автомобилей 8-12 дней, принимаем
Дкр=
8;
– простой автомобилей в капитальном
(восстановительном) ремонте, дни. Для
легковых автомобилей 8-12 дней, принимаем
Дкр=
8;
 – удельный простой автомобилей в ТО и
ТР, дни/1000 км;
– удельный простой автомобилей в ТО и
ТР, дни/1000 км;
 – коэффициент корректировки
продолжительности простоев в ТО и ТР в
зависимости от пробега автомобилей с
начала эксплуатации.
– коэффициент корректировки
продолжительности простоев в ТО и ТР в
зависимости от пробега автомобилей с
начала эксплуатации.
Наибольшее
влияние на
 оказывают среднесуточный пробег и
возраст автомобиля. Поэтому необходимо
оценить их влияние в наиболее характерных
диапазонах их изменения.
оказывают среднесуточный пробег и
возраст автомобиля. Поэтому необходимо
оценить их влияние в наиболее характерных
диапазонах их изменения.
Далее определяется зависимость годовой производительности автомобиля от и среднесуточного пробега:
 (8.4)
(8.4)
где αн − коэффициент нерабочих дней, αн = 0,91 − 0,92. Принимаем αн = 0,91;
q − номинальная грузоподъемность автомобиля q = 5;
γ − коэффициент использования грузоподъемности γ = 0,5 − 1,0. Принимаем γ = 0,5;
β − коэффициент использования пробега, β = 0,7 − 0,95. Принимаем β = 0,7.
Расчеты коэффициента технической готовности и годовой производительности автомобиля производятся для среднесуточных пробегов 100, 200, 300 и 400 км.
Расчеты коэффициента технической готовности и годовой производительности автомобиля произведены с помощью программы Excel, а их результаты представлены в табличной (таблицы 8.1 – 8.4) и графической форме (рисунки 8.1 и 8.2).
Таблица 8.1 – Результаты расчетов для lc=100кс
Пробег с начала эксплуатации |
К41 |
Дэ.ц. |
Др.ц. |
αТ |
Wг |
0…0,25 |
0,7 |
972 |
36,02 |
0,964 |
5799,33 |
0,25…0,5 |
0,7 |
972 |
36,02 |
0,964 |
5799,33 |
0,5…0,75 |
1 |
972 |
47,68 |
0,953 |
5751,95 |
0,75…1 |
1,2 |
972 |
55,46 |
0,946 |
5705,33 |
Таблица 8.2 – Результаты расчетов для lc=200кс
Пробег с начала эксплуатации |
К41 |
Дэ.ц. |
Др.ц. |
αТ |
Wг |
0…0,25 |
0,7 |
486 |
36,02 |
0,931 |
11379,91 |
0,25…0,5 |
0,7 |
486 |
36,02 |
0,931 |
11379,91 |
0,5…0,75 |
1 |
486 |
47,68 |
0,911 |
11198,86 |
0,75…1 |
1,2 |
486 |
55,46 |
0,898 |
11023,49 |