Материал: zPUs6LtHHJ
МИНОБРНАУКИ РОССИИ
___________________________________
Санкт-Петербургский государственный электротехнический университет «ЛЭТИ» им. В. И. Ульянова (Ленина)
__________________________________________________________________
А. Д. СМИРНОВ
МИКРОЭЛЕКТРОННЫЕ ДАТЧИКИ ФИЗИЧЕСКИХ ВЕЛИЧИН
Учебное пособие
Санкт-Петербург Издательство СПбГЭТУ «ЛЭТИ»
2016
1
УДК 621.384
ББК 3 965-044.3
С50
С50 Смирнов А. Д. Микроэлектронные датчики физических величин: учеб. пособие. СПб.: Изд-во СПбГЭТУ «ЛЭТИ», 2016. 40 с.
ISBN 985-5-7629-1825-1
Рассматриваются физические принципы работ первичных преобразователей (сенсоров) физических величин в электрический сигнал, изготовление сенсоров методами микроэлектронной технологии и основные применения их в науке и технике
Предназначены студентам, обучающимся по направлению 11.03.04. «Электроника и наноэлектроника».
Рецензенты: кафедра электротехники и электроэнергетики СПбПУ; канд. техн. наук, В. А. Клевцов (ПАО «Светлана»).
Утверждено редакционно-издательским советом университета
в качестве учебного пособия
ISBN 985-5-7629-1825-1 |
СПбГЭТУ «ЛЭТИ», 2016 |
2
ВВЕДЕНИЕ
Бурное развитие микроэлектроники в период 80–90-х гг. прошлого века определило технический облик современного общества. В свою очередь, достижения микроэлектронной технологии послужили толчком в развитии еще двух областей, которые будут определять прогресс нашей цивилизации в ближайшее десятилетие: информационных технологии (ИТ) и микромеханической системы (МЭМС). ИТ обеспечивает связи внутри человеческого сообщества, а МЭМС позволяет связать информационные системы с внешним материальным миром.
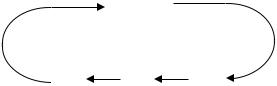
По Винеру, информационно-управляющая система (рис. 1) состоит из объекта управления 1, сенсорной подсистемы 2, подсистемы анализа и при-
нятия решения 3, активаторной подси- |
|
|
|
|
|
|
|
стемы 4. |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
||
Сенсорная система является соби- |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рателем информации о внешнем мире, |
|
|
|
|
|
|
|
активаторная подсистема воздействует |
|
|
|
|
|
|
|
4 |
|
|
3 |
|
|
2 |
|
на внешний мир. |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Микроэлектронная революция за- |
Рис. 1. Информационно- |
||||||
тронула в основном подсистему 3, от- |
управляющая система |
||||||
личительной особенностью которой является унификация аппаратурных решений, их инвариантность к техническим областям вне зависимости от структуры систем (безразлично чем управлять), и свои функции она выполняет с использованием ограниченного количества типов микропроцессоров.
Эволюционные пути подсистем 4, 2 очень разнообразны. Для информа- ционно-управляющей системы на сегодняшний день практически выполнена первая фаза – создание микроэлектронной элементной и фундаментальной баз. Теперь настала очередь для унификации технологических реализаций подсистем 4, 2.
В настоящее время МЭМС переживает свой расцвет, используя наработки микроэлектроники, новые материалы и новые подходы. В учебном пособии основное внимание уделено сенсорной подсистеме. Рассмотрены конструкции и способы изготовления чувствительных элементов методами микроэлектронной групповой технологии.
Датчики – общее определение микромеханических преобразователей физических величин, чувствительным элементом в которых является сенсор.
3
Сенсор – устройство, чувствительное к воздействию на него определенного явления физического мира. Природа этого явления может быть различного происхождения. Именно «чувствительность» сенсоров позволяет им быть «сборщиками» информации об окружающем мире. Количественная оценка меры воздействия на чувствительный элемент позволяет строить адекватную модель реального мира. Интеграция сенсоров в единую систему, связанную с системой анализа, делает их интеллектуально-информационной системой, способной отслеживать любые изменения окружающей среды.
Сразу отметим, что при создании датчиков используются достижения многих областей науки и техники: механики, физики, оптики, химии, биологии, информатики, микроэлектроники, вычислительной техники. Разработчик таких устройств должен обладать обширными научными познаниями, быть способным к интеграции сенсоров различной природы в одном приборе с целью увеличения его функциональных возможностей.
Прежде чем приступить к знакомству с технологией сенсорных устройств, введем основные понятия и метрологические характеристики первичных преобразователей.
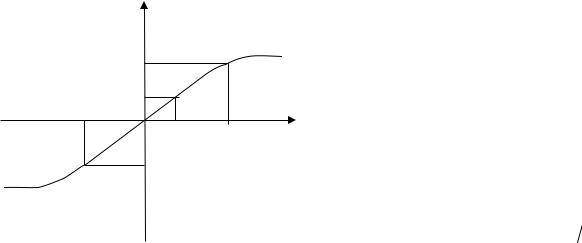
Датчик – устройство, выходные параметры которого являются функцией конкретной измеряемой физической величины (рис. 2).
|
U |
|
|
Характеристика преобразования |
|
|
|
|
датчика описывается выражением |
|
U3 |
|
|
U = F(m), где U – выходной сигнал; |
|
|
|
m – измеряемая величина. |
|
|
U2 |
|
|
|
m1 |
|
|
Отсюда основной характеристи- |
|
|
m2 |
m3 |
m |
кой любого датчика является его чув- |
|
|
|
|
ствительность, т. е. отношение ва- |
|
U1 |
|
|
риации выходного сигнала устройства |
|
|
|
|
к изменению измеряемой величины, |
|
|
|
|
вызвавшей эту вариацию S = ∆U ∆m; |
m = m j.
Единицы измерения S определяются природой датчика (Ом/ оС – терморезистора, мВ/(В.кПа) – тензодатчиков давления).
Другим очень важным параметром датчика является линейность преобразовательной характеристики в диапазоне измеряемых величин. Система
4

линейна, если в заданном диапазоне преобразовательной характеристики чувствительность сенсора не зависит от значения измеряемой величины. При этом приращение выходного сигнала пропорционально изменению измеряемой величины. Линейность определяется как
γ = (U1 −U3 )− 2(U2 −U3 ) 100 ,
2U1
где U1, U2, U3 – значения выходного сигнала в начале, в середине и в конце диапазона измеряемых величин (m) и выражается в процентах.
При отклонении от линейности преобразовательной характеристики последнюю приходится линеаризировать, включая устройства коррекции, что вносит погрешность в измерение физических величин. В принципе линеаризация необязательна: это делается только для удобства пользователя. В настоящее время изготавливаются процессоры, отслеживающие любой закон изменения измеряемой величины, включая многопараметрические изменения.
Наличие гистерезиса измеряемой величины в диапазоне ее изменения
характеризуется вариацией δ, выражаемой в процентах: δ = U ↑ −U ↓ 100 ,
Umax
где U ↑, U ↓ – значения выходного сигнала, соответствующего одному и тому же значению измеряемой физической величины при приближении к ней со стороны больших и меньших значений, а Umax – выходной сигнал при
верхнем значении измеряемой величины.
Общей характеристикой различных датчиков является быстродействие, связанное с переходными процессами преобразования измеряемой величины в считываемый сигнал. Оно определяется временем нарастания выходного сигнала до определенного уровня (0,9Umax ).
Кроме перечисленных параметров датчики характеризуются стабильностью выходного сигнала во времени, в температурном диапазоне, надежностью, сроком службы и рядом частных требований, например селективностью в газоанализаторах. Но основными параметрами первичных преобразователей являются чувствительность, линейность преобразовательной характеристики и вариация (отсутствие гистерезиса).
В общем виде датчик представляет собой устройство, состоящее из активного (чувствительного) элемента, который либо непосредственно
5