|
 ,(11) ,(11)
|
|
де  - похибка
сельсинів, що визначається класом точності;
- похибка
сельсинів, що визначається класом точності;
 - похибка редуктора з передаточним
числом
- похибка редуктора з передаточним
числом  , що
залежить від степені точності виготовлення коліс.
, що
залежить від степені точності виготовлення коліс.
Як випливає з виразу (11),
збільшення передаточного числа дає суттєве зменшення похибки до
тих пір, поки  не стає
спів розмірною з похибкою механічного редуктора.
не стає
спів розмірною з похибкою механічного редуктора.
Наприклад, якщо при заданому  вибрати
редуктор з
вибрати
редуктор з  ,
,  ,
,  , то
, то  . Якщо
застосувати редуктор з
. Якщо
застосувати редуктор з  , то
, то  ,
,  , то
, то  .
.
Крім того, підвищення швидкості
сельсинів проявляється і на динамічній похибці, тому для приладних редукторів,
що пов’язують сельсини  і
і  ,
рекомендується використовувати передаточні числа
,
рекомендується використовувати передаточні числа  .
.
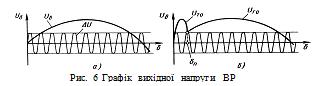
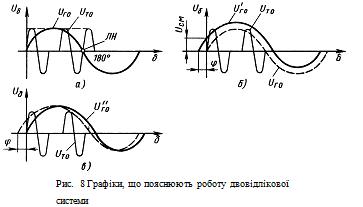
Суттєвим для ВР є також вибір
парного чи непарного передаточного числа редуктора. Для простоти перерахунку
кутів передаточне число повинно бути парним. Але, як бачимо з рис. 8, а, при
цьому появляється ймовірність хибного узгодження по куту  , оскільки
нестійкий нуль каналу співпадає з
стійким нулем каналу (при
непарному такої
ймовірності не існує). При розузгоджених в СП, що відповідають умові
, оскільки
нестійкий нуль каналу співпадає з
стійким нулем каналу (при
непарному такої
ймовірності не існує). При розузгоджених в СП, що відповідають умові  , і при
, і при  привод за
точним відліком буде забезпечувати узгодження до найближчого стійкого нуля,
тобто до
привод за
точним відліком буде забезпечувати узгодження до найближчого стійкого нуля,
тобто до  . В
дійсності між вихідним і задавальним валами буде розузгодження в , і в
подальшому рух задавального валу буде відпрацьовуватися з такою похибкою.
. В
дійсності між вихідним і задавальним валами буде розузгодження в , і в
подальшому рух задавального валу буде відпрацьовуватися з такою похибкою.
Щоб усунути хибний нуль, до вихідної
напруги каналу добавляють
напругу зміщення  , що
знімається з вторинної обмотки малопотужного трансформатора (суцільна крива на
рис. 8, б). В цьому випадку при напруга каналу
, що
знімається з вторинної обмотки малопотужного трансформатора (суцільна крива на
рис. 8, б). В цьому випадку при напруга каналу  більша
напруги
більша
напруги  . І привод
буде узгоджуватися по каналу до стійкого істинного нуля. Проте
зміщення напруги призводить до того, що в узгодженому положенні напруга каналу не дорівнює
нулю,
. І привод
буде узгоджуватися по каналу до стійкого істинного нуля. Проте
зміщення напруги призводить до того, що в узгодженому положенні напруга каналу не дорівнює
нулю,  . Для
усунення цього явища статор передаючого сельсина розвертають відносно статора
приймаючого сельсина на кут
. Для
усунення цього явища статор передаючого сельсина розвертають відносно статора
приймаючого сельсина на кут
 ,
,
де  - амплітуда
вихідної напруги.
- амплітуда
вихідної напруги.
Вихідна напруга каналу в цьому
випадку
 ,
,
напруги по обох виходах при  дорівнюватимуть
нулю і крива
дорівнюватимуть
нулю і крива  (рис. 8, в)
зміститься вправо на кут
(рис. 8, в)
зміститься вправо на кут  .
.
. Багатополюсні перетворювачі
Підвищення вимог до точності ВР
обумовило появу багатополюсних перетворювачів, створених на базі індукційних
мікро машин шляхом збільшення числа пар ротора і статора. Амплітуда вихідної
напруги такого перетворювача здійснює повний період зміни за поворот ротора
відносно статора на один полюс, а число періодів зміни за повний поворот ротора
дорівнює числу пар полюсів, тобто
 ,
,
де  - число
пар полюсів.
- число
пар полюсів.
Оскільки ефект багато періодичності
вихідного сигналу створюється не механічним шляхом (за рахунок редуктора), а
електрично, то пристрої, що реалізують цей принцип, називаютьсяються
перетворювачами з електричною редукцією. Передаточне число такого редуктора
визначається числом пар полюсів  . ВР на багатополюсних
перетворювачах будують за принципом двоканальної системи відліку, оскільки
число стійких положень, як і при механічному редукторі, визначається
передаточним відношенням редуктора.
. ВР на багатополюсних
перетворювачах будують за принципом двоканальної системи відліку, оскільки
число стійких положень, як і при механічному редукторі, визначається
передаточним відношенням редуктора.
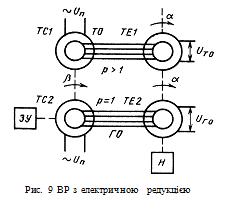
У ВР з електричною редукцією (рис.
9) в якості датчика і приймача в каналі використовуються однополюсні перетворювачі
 , а в каналі
, а в каналі
 -
багатополюсні
-
багатополюсні  . Датчики
(аналогічно і приймачі) каналів і пов’язані між собою одним валом і
мають однакову частоту обертання. Але оскільки число пар полюсів різне, сигнал
в каналі буде
змінюватися в разів
частіше, ніж в каналі . В іншому
ВР працює аналогічно двоканальному вимірювачу з механічним редуктором. Але має
явні переваги:
. Датчики
(аналогічно і приймачі) каналів і пов’язані між собою одним валом і
мають однакову частоту обертання. Але оскільки число пар полюсів різне, сигнал
в каналі буде
змінюватися в разів
частіше, ніж в каналі . В іншому
ВР працює аналогічно двоканальному вимірювачу з механічним редуктором. Але має
явні переваги:
відсутність похибки, обумовленої
неточністю виготовлення редуктора, і, як наслідок, підвищенням точності
передачі пропорційно числу пар полюсів;
менша динамічна похибка за рахунок
зниження частоти обертання датчиків каналу ;
мале значення відношення мінімальної
напруги до крутизни, що характеризує рівень залишкової напруги: длясхем з
однополюсними перетворювачами при 
 .
.
В якості багатополюсних
перетворювачів широкого застосування набули багатополюсні ОТ, редуктосини,
індуктосини. Ці пристрої розрізняються конструктивно, принципом дії,
технологією виготовлення, але принцип електричної редукції закладений в кожному
з них, що дозволяє одержати високу точність перетворення.

Багатополюсні ОТ (рис. 10, а)
виконуються у вигляді тороїдальних неявнополюсних ротора  і статора
і статора  з
рівномірно розподіленими обмотками кільцевого типу. Зсунуті по фазі на
з
рівномірно розподіленими обмотками кільцевого типу. Зсунуті по фазі на  відносно
одна одної обмотки розташовуються шарами: перший шат - обмотка синусна, другий
- обмотка косинусна. Збільшення числа пар полюсів досягається за рахунок зміни
напрямку намотки обмотки фази (на рис. 10,б для простоти зображена тільки одна
обмотка).
відносно
одна одної обмотки розташовуються шарами: перший шат - обмотка синусна, другий
- обмотка косинусна. Збільшення числа пар полюсів досягається за рахунок зміни
напрямку намотки обмотки фази (на рис. 10,б для простоти зображена тільки одна
обмотка).
Крім того, на практиці знаходять
застосування ОТ, виконані по трьохобмоточній схемі: на роторі вкладаються
двохполюсна однофазна обмотка збудження, а дві вихідні обмотки за рахунок
спеціальної укладки обмотки фази вкладаються в пази статора - так звані синусні
або косинусні розподілені обмотки.
При створенні двоканальних систем ВР
використовують ОТ з різними конструктивними виконаннями:
безкорпусна конструкція (рис. 10,
а);
кріплення на одній осі однополюсного
і багатополюсного ОТ;
вбудована конструкція (двополюсний
ОТ всередині багатополюсного);
розміщення обмоток багатополюсного
ОТ з обмотками двополюсного ОТ на одному магніто проводі з використанням одних
і тих же пазів.
Багатополюсні ОТ відрізняються малим
коефіцієнтом послаблення вихідного сигналу, мають похибку не більше  ,але
вимагають наявності контактів при необмеженому куті повороту ротора.
Перспективним є застосування безконтактних уніполярних ОТ з трьома обмотками і
зубцевим ротором.
,але
вимагають наявності контактів при необмеженому куті повороту ротора.
Перспективним є застосування безконтактних уніполярних ОТ з трьома обмотками і
зубцевим ротором.
Індукційні редуктори відносяться до
безконтактних синусно-косинусних обертовим трансформаторам з електричною
редукцією. Конструктивно редуктосин складається (рис. 11, а) з зубцевого
статора, на якому розташовані як первинна , так і дві вторинні ,  вихідні
обмотки. Ротор представляє собою зубчасте колесо, число зубців якого знаходиться
у співвідношенні
вихідні
обмотки. Ротор представляє собою зубчасте колесо, число зубців якого знаходиться
у співвідношенні  з числом
зубців статора. До первинної обмотки підводиться напруга живлення. При повороті
ротора на кут, що дорівнює одній зубцевій поділці (один полюс), вихідна напруга
на обмотці пройде
повний період і буде змінюватися по закону синуса, а на обмотці , зсунутій
на , - по
закону косинуса.
з числом
зубців статора. До первинної обмотки підводиться напруга живлення. При повороті
ротора на кут, що дорівнює одній зубцевій поділці (один полюс), вихідна напруга
на обмотці пройде
повний період і буде змінюватися по закону синуса, а на обмотці , зсунутій
на , - по
закону косинуса.
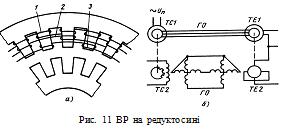
Редуктосини застосовують в якості
вимірювачів розузгодження в СП, в яких внаслідок вимог високої точності
передачі кута не може бути використана механічна передача. В такому СП (рис.
11, б) канал будується
на редуктосині  , що працює
в синхронній передачі з однополюсним ОТ. Повороту редуктосина на одну зубцеву
поділку відповідає повний поворот ротора
, що працює
в синхронній передачі з однополюсним ОТ. Повороту редуктосина на одну зубцеву
поділку відповідає повний поворот ротора  на
на  , що дозволяє з великою точністю
відрахувати кут повороту задавального вала. При повороті ротора редуктосина на ротор повернеться
на
, що дозволяє з великою точністю
відрахувати кут повороту задавального вала. При повороті ротора редуктосина на ротор повернеться
на  , де -
передаточне відношення редуктора. Канал побудований на двополюсних
, де -
передаточне відношення редуктора. Канал побудований на двополюсних  і
і  і служить
для забезпечення самосинхронізації. Робота двоканальної системи з редуктосином
аналогічна роботі ВР, показаного на рис. 9, але має похибку не більше
і служить
для забезпечення самосинхронізації. Робота двоканальної системи з редуктосином
аналогічна роботі ВР, показаного на рис. 9, але має похибку не більше  при
електричній редукції, що дорівнює
при
електричній редукції, що дорівнює  або
або  . Подальше збільшення точності
обмежене похибкою нарізування зубчастих коліс і особливо коліс ротора.
. Подальше збільшення точності
обмежене похибкою нарізування зубчастих коліс і особливо коліс ротора.
Необхідно також відмітити таку
перевагу редуктосинів перед ОТ, як відсутність контактів.
Індуктосини - це перетворювачі з
багатополюсними печатними провідниками (обмотками), радіально нанесеними на
ізоляційні диски. Завдяки відсутності ковзаючих контактів підвищується
надійність перетворювачів, а редукція до  досягається при достатньо малих
розмірах за рахунок технології нанесення печатних провідників. ВР на
індуктосинах працюють з похибкою не більше
досягається при достатньо малих
розмірах за рахунок технології нанесення печатних провідників. ВР на
індуктосинах працюють з похибкою не більше  , але мають низький вихідний сигнал
, але мають низький вихідний сигнал  , тому
вимоги до підсилювачів доволі жорсткі.
, тому
вимоги до підсилювачів доволі жорсткі.
Подальше збільшення точності може
бути забезпечене з допомогою магніторезистивних перетворювачів, що є
вдосконаленими індуктосинами. Радіальні провідники в них виконані з
магніторезистивного напівпровідникового складу, який змінює свою провідність в
залежності від магнітного поля. При цьому зменшується вплив низки технологічних
похибок, властивих індуктосинам. Магніторезистивні перетворювачі можуть
працювати на постійному струмі, що суттєво спрощує структуру їх відлікової
частини і приводить до підвищення роздільної здатності і надійності
перетворювача в цілому. Магнітне поле може бути створене також з застосуванням
печатних обмоток, радіальні провідники яких виконані у виді постійних магнітів.
Високоточні індуктосини і
магніторезистивні перетворювачі використовують в основному в цифрових СП в
якості перетворювачів неперервного сигналу в дискретний. У зв’язку з цим
виникла необхідність в одержанні електричної редукції з передаточним
відношенням, кратним  , тобто
, тобто  ,
,  ,
,  ,
,  . Основним
утрудненням при створенні таких перетворювачів є одержання малих розмірів, що
обумовлено недосконалістю технології виготовлення і складання.
. Основним
утрудненням при створенні таких перетворювачів є одержання малих розмірів, що
обумовлено недосконалістю технології виготовлення і складання.
7. Вибір керувача
При виборі керувача (К) необхідно
враховувати наступні фактори:
фізичну природу величини, що
регулюється;
діапазон роботи і характер зміни
задавального і вихідного сигналів (поступальне чи кутове);
необхідну точність перетворення,
чутливість, зону нечутливості;
швидкодію;
вплив на роботу КП зовнішніх умов
експлуатації: те
мператури, тиску, вологості,
вібрацій;
допустимі розміри, масу, термін
служби, надійність і т.д.
Врахувати при виборі конкретного К
всі перераховані фактори явно неможливо, оскільки деякі з них суперечливі.
Оскільки, при задоволенні вимог підвищеної надійності нехтують технологічними і
економічними факторами, віддаючи перевагу більш складний по технології
виготовлення безконтактний сельсин контактному. А оскільки точносні параметри
безконтактних сельсинів нижчі, то точність перетворення сигналу при цьому також
зменшується. Дотримуючись загальної тенденції мікромініатюризації апаратури,
підвищують вимоги до розмірів датчиків. Проте із зменшенням розмірів елементів
точність індукційних мікромашин понижується.
Із всієї сукупності факторів і вимог
при виборі К у виді ВР на потенціометрах або індукційних мікро машинах основним
критерієм є точність, що визначається інструментальною похибкою виготовлення
елементів. Ця похибка не піддається компенсації і безпосередньо входить в
статичну похибку всього СП. При проектуванні вважають, що на долю ВР припадає  результуючої
статичної похибки приводу, тобто
результуючої
статичної похибки приводу, тобто
|
 .(12) .(12)
|
|
Якщо одно канальні схеми на
потенціометрах, що вимірюють власну інструментальну похибку  , не
задовольняють заданої точності, застосовують трансформаторі дистанційні
передачі на сельсинах і ОТ. Перевагу при цьому віддається прецизійним ОТ, що
дозволяють знизити похибку передачі кута до
, не
задовольняють заданої точності, застосовують трансформаторі дистанційні
передачі на сельсинах і ОТ. Перевагу при цьому віддається прецизійним ОТ, що
дозволяють знизити похибку передачі кута до  порівняно з похибкою
порівняно з похибкою  , характерною
для сельсинів. Застосуванням двоканальної передачі кута на сельсинах і ОТ та
механічному редукторі можна добитися зниження похибки до
, характерною
для сельсинів. Застосуванням двоканальної передачі кута на сельсинах і ОТ та
механічному редукторі можна добитися зниження похибки до  . Умова (12)
в цьому випадку можна записати в наступному виді:
. Умова (12)
в цьому випадку можна записати в наступному виді:
|
 .(13) .(13)
|
|
Подальше збільшення точності
передачі кута забезпечується застосуванням багатоканальних перетворювачів з
електричною редукцією. Електрична редукція виключає похибки зубчастої передачі
і доводить точність до  .
.
Після попереднього визначення типу
ВР (індукційного, потенціометричного) переходять до вибору датчика і приймача з
числа рекомендованих для застосування. Технічні дані різних типів
потенціометрів наводяться в довідниках.
Оскільки похибка ВР складається з
похибок датчиків і приймача, то для підвищення точності передачі кута
розузгодження обидва елементи вибирають одного класу точності, так щоб
інструментальна похибка була меншою або дорівнювала допустимій похибці, що розраховується
за (12):  .
.
Пари підбирають у відповідності з
рекомендаціями, що подаються в паспорті, або за вказаному призначенню:
літерою Д позначають датчики (СЛ,
ВТДП-Д);
буквами П або ПТ - приймачі (СПТ,
ВТДП-П).
Крім того, пари підбирають з
врахуванням параметрів спряження. Для ОТ такими параметрами є напруга живлення  , частота
, частота  , коефіцієнт
трансформації
, коефіцієнт
трансформації  ; для
сельсинів - напруга живлення
; для
сельсинів - напруга живлення  , частота
, частота  ,
максимальна напруга синхронізації - найбільша напруга, що знімається з
двох фаз обмоток синхронізації. Наприклад, сельсину-датчику НД-404П
,
максимальна напруга синхронізації - найбільша напруга, що знімається з
двох фаз обмоток синхронізації. Наприклад, сельсину-датчику НД-404П  відповідає
сельсин-приймач БС-155А з такими ж параметрами, а ВТДП-Д типу СКТ-225-2Д відповідає
ВТДП-П типу СКТ-225-2П з однаковими параметрами
відповідає
сельсин-приймач БС-155А з такими ж параметрами, а ВТДП-Д типу СКТ-225-2Д відповідає
ВТДП-П типу СКТ-225-2П з однаковими параметрами  .
.
Параметрами для потенціометрів є
напруга живлення  . Крутизна
статичної характеристики, залежні від діапазону зміни робочого кута. Якщо
діапазони роботи потенціометрів неоднакові, то ідентичності характеристик
досягають введенням у ланцюг потенціометрів додаткових резисторів.
. Крутизна
статичної характеристики, залежні від діапазону зміни робочого кута. Якщо
діапазони роботи потенціометрів неоднакові, то ідентичності характеристик
досягають введенням у ланцюг потенціометрів додаткових резисторів.
При виборі потенціометрів особливу
увагу приділяють підбору їх опору для узгодження з навантаженням і зменшення
методичної похибки. Для полегшення узгодження потенціометри кожної серії
випускають з різними номіналами опорів. Номінал опору вибирають за похибкою,
обумовленою нелінійністю характеристики і визначаються класом точності
потенціометра.
Для двоканальної системи передачі
кута на сельсинах і ОТ передаточні відношення редуктора
|
 ,(14) ,(14)
|
|
де  - похибка,
що визначається класом точності сельсинів і ОТ.
- похибка,
що визначається класом точності сельсинів і ОТ.
перетворювач
розузгодження потенціометр
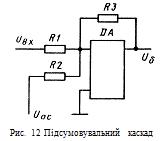
Необхідною умовою застосування
сумуючого каскаду (рис. 12) в якості ПК є не лінійність додавання вихідних
сигналів.
Додавання сигналів реалізують з
допомогою схем послідовного і паралельного додавання. Оскільки схема
послідовного додавання - додавання напруг - має меншу завадостійкість, перевагу
віддають схемі паралельного додавання (див. рис. 12) - додаванням струмів.
Параметри схеми додавання сигналів визначаються вхідними опорами сумуючого
підсилювача і опором навантаження. Якщо схема додавання не задовольняє умови
високоомного навантаження (наприклад, при надходженні вхідного сигналу з
аналогової ЕОМ), то послідовно з джерелами вхідних сигналів ставлять додаткові
резистори  і
і  , опір яких
буде залежати від внутрішнього опору джерела вхідного сигналу.
, опір яких
буде залежати від внутрішнього опору джерела вхідного сигналу.
 .
.
Література
1.
Алиев, И.И. Электротехника и электрооборудование: Справочник: Учебное пособие
для вузов / И.И. Алиев. - М.: Высш. шк., 2010. - 1199 c.
.
Аполлонский, С.М. Теоретические основы электротехники. Электромагнитное поле:
Учебное пособие / С.М. Аполлонский. - СПб.: Лань, 2012. - 592 c.
.
Башарин, С.А. Теоретические основы электротехники: Теория электрических цепей и
электромагнитного поля: Учебное пособие для студ. высш. учеб. заведений / С.А.
Башарин, В.В. Федоров. - М.: ИЦ Академия, 2010. - 368 c.
.
Белов, Н.В. Электротехника и основы электроники: Учебное пособие / Н.В. Белов,
Ю.С. Волков. - СПб.: Лань, 2012. - 432 c.
.
Бессонов, Л.А. Теоретические основы электротехники. Электрические цепи: Учебник
для бакалавров / Л.А. Бессонов. - М.: Юрайт, 2013. - 701 c.
.
Борисов, Ю.М. Электротехника / Ю.М. Борисов, Д.Н. Липатов, Ю.Н. Зорин. - М.:
Энергоатомиздат, 1985.
.
Буртаев, Ю.В. Теоретические основы электротехники: Учебник / Ю.В. Буртаев, П.Н.
Овсянников; Под ред. М.Ю. Зайчик. - М.: ЛИБРОКОМ, 2013. - 552 c.
.
Бутырин, П.А. Электротехника: Учебник для начального проф. образования / П.А.
Бутырин, О.В. Толчеев, Ф.Н. Шакирзянов. - М.: ИЦ Академия, 2012. - 272 c.
.
Гальперин, М.В. Электротехника и электроника: Учебник / М.В. Гальперин. - М.:
Форум, НИЦ ИНФРА-М, 2013. - 480 c.
.
Данилов, И.А. Общая электротехника: Учебное пособие для бакалавров / И.А.
Данилов. - М.: Юрайт, ИД Юрайт, 2013. - 673 c.
.
Ермуратский, П.В. Электротехника и электроника / П.В. Ермуратский, Г.П.
Лычкина, Ю.Б. Минкин. - М.: ДМК Пресс, 2013. - 416 c.
.
Жаворонков, М.А. Электротехника и электроника: Учебное пособие для студ. высш.
проф. образования / М.А. Жаворонков, А.В. Кузин. - М.: ИЦ Академия, 2013. - 400
c.
.
Иньков, Ю.М. Электротехника и электроника: Учебник для студентов учреждений
среднего профессионального образования / Б.И. Петленко, Ю.М. Иньков, А.В. Крашенинников.
- М.: ИЦ Академия, 2013. - 368 c.
.
Касаткин, А.С. Электротехника / А.С. Касаткин, М.В. Немцов. - М.: Энергоиздат,
1983.
.
Киреева, Э.А. Полный справочник по электрооборудованию и электротехнике (с
примерами расчетов) / С.Н. Шерстнев, Э.А. Киреева; Под общ. ред. С.Н.
Шерстнева. - М.: КноРус, 2013. - 864 c.
 ,(6)
,(6)